
具有目标识别功能的汽车监控系统.pdf

思洁****爱吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

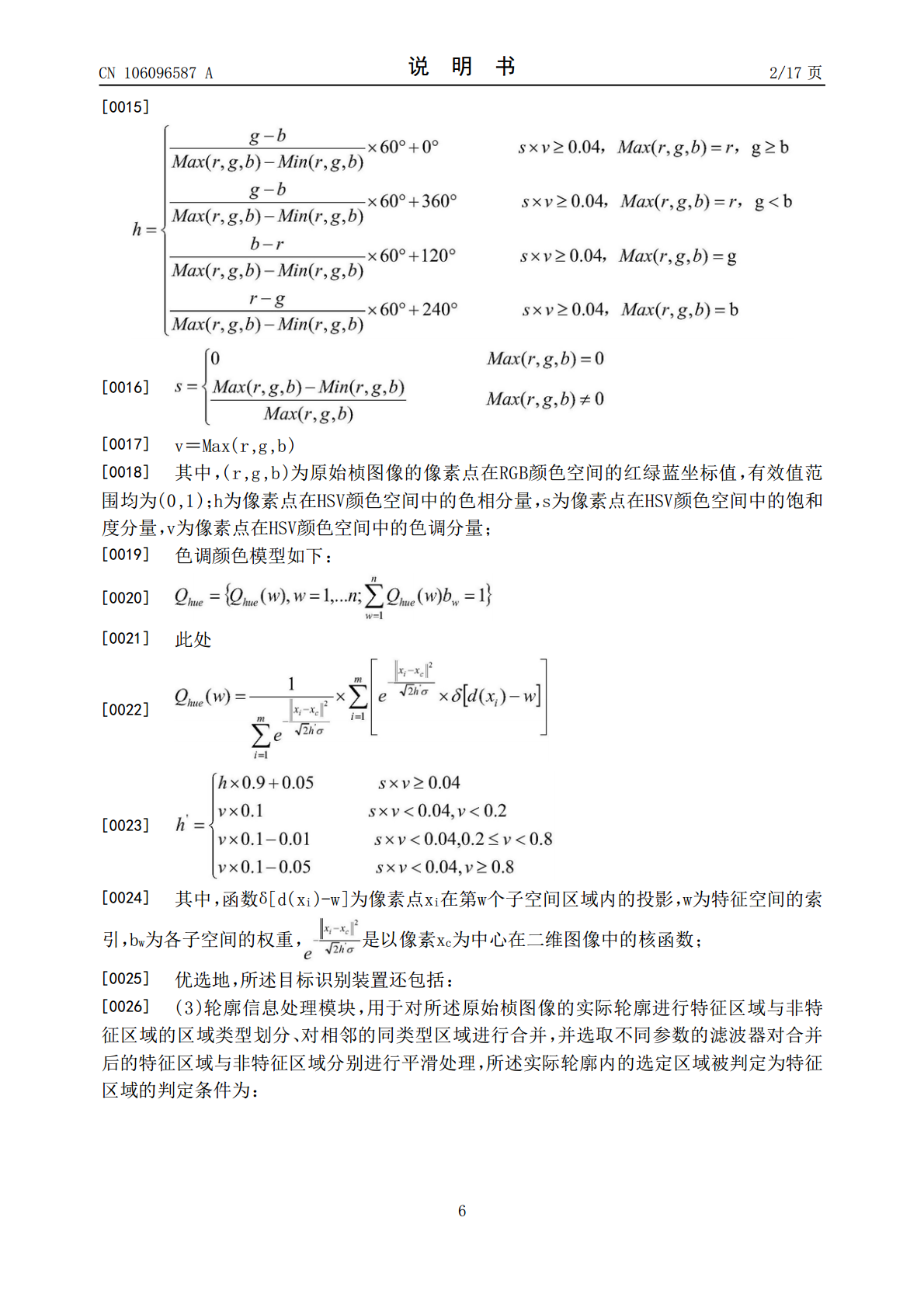
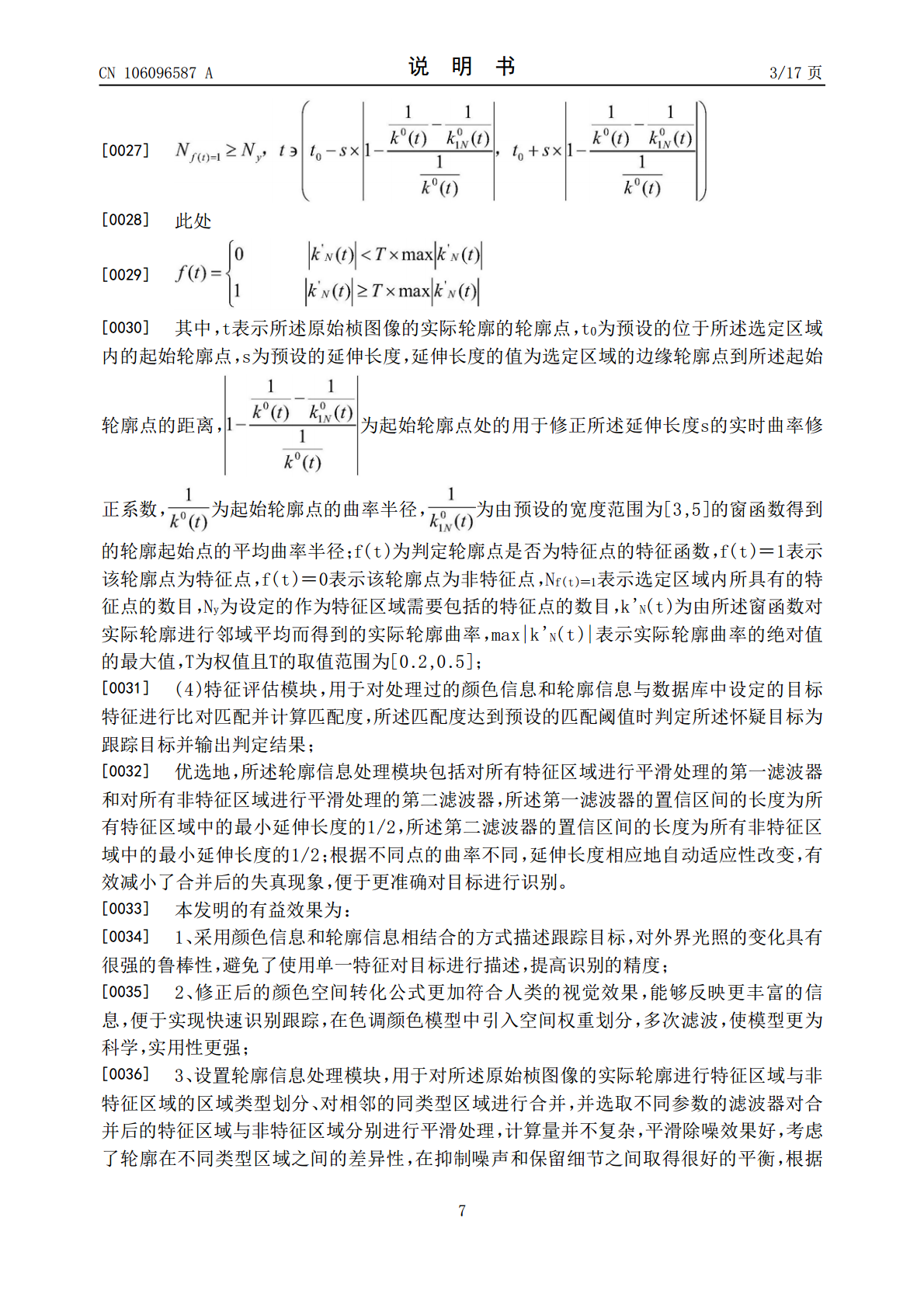
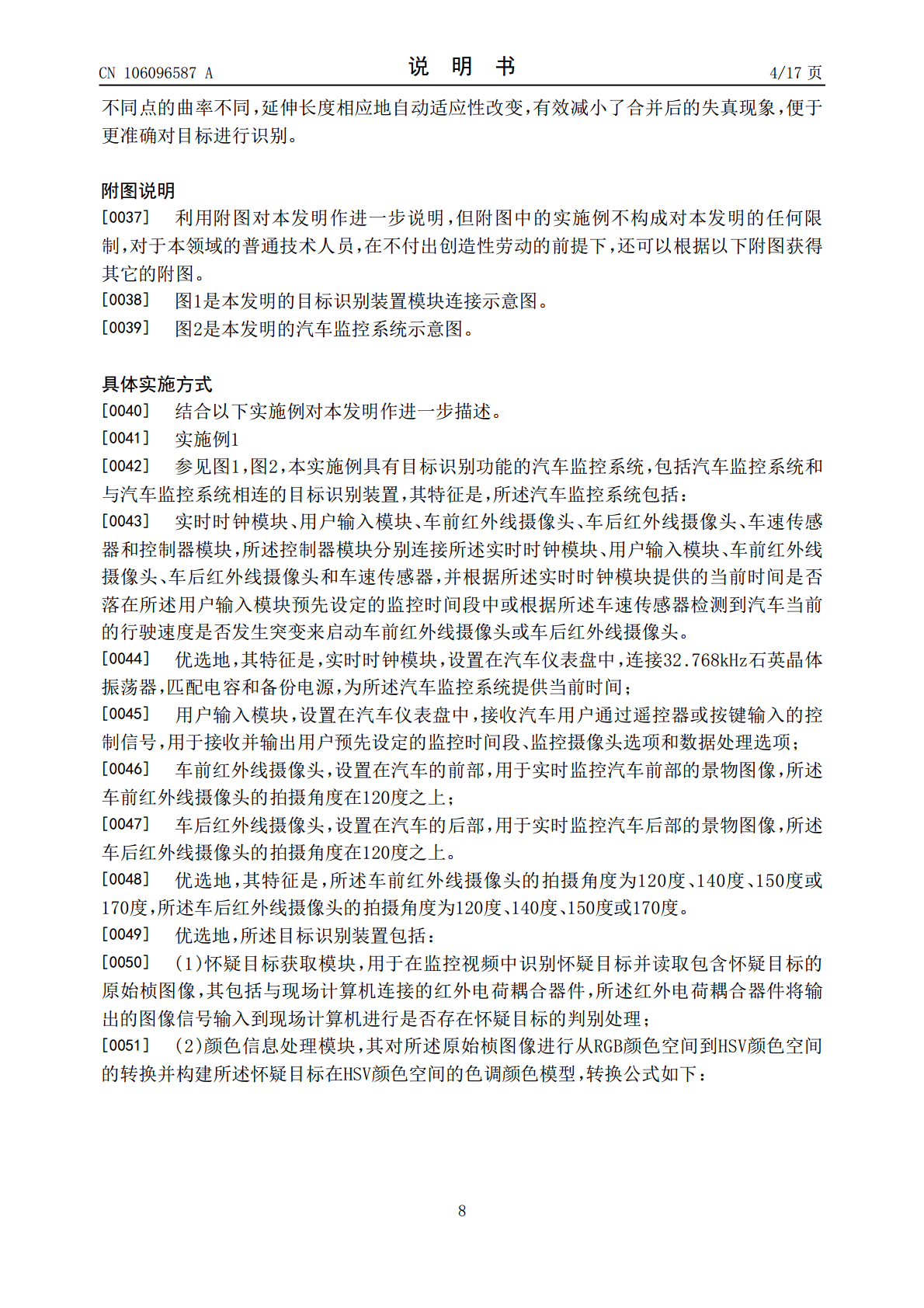
具有目标识别功能的汽车监控系统.pdf
本发明提供了具有目标识别功能的汽车监控系统,包括汽车监控系统和与汽车监控系统相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特征区域与非特
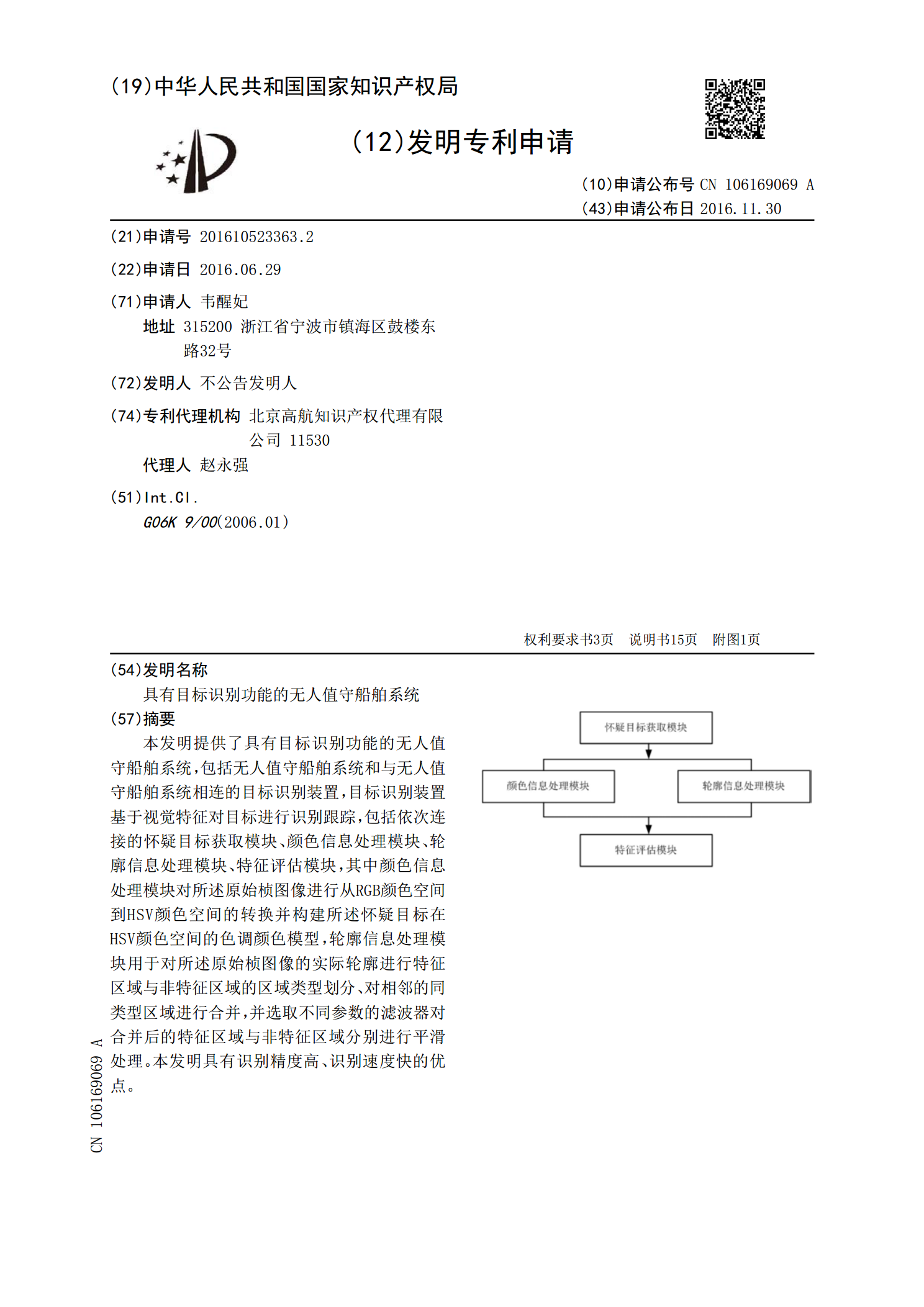
具有目标识别功能的无人值守船舶系统.pdf
本发明提供了具有目标识别功能的无人值守船舶系统,包括无人值守船舶系统和与无人值守船舶系统相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特

具有目标识别功能的车载夜视系统及其目标标识方法.pdf
本发明公开了具有目标识别功能的车载夜视系统及其目标标识方法,其中,所述系统包括:依次连接的远红外图像采集模块、图像分类模块、目标分类器训练模块、目标分类器、标示模块和显示模块。通过远红外图像采集模块用于采集车辆周边的图像信息,并通过目标分类器来确定出所述图像中的目标,再对目标进行标示,确定所述目标的标识框,然后显示出来。这样一来,能够完整的标识出物体的轮廓,并能实时随目标变化而相应跟踪变化。
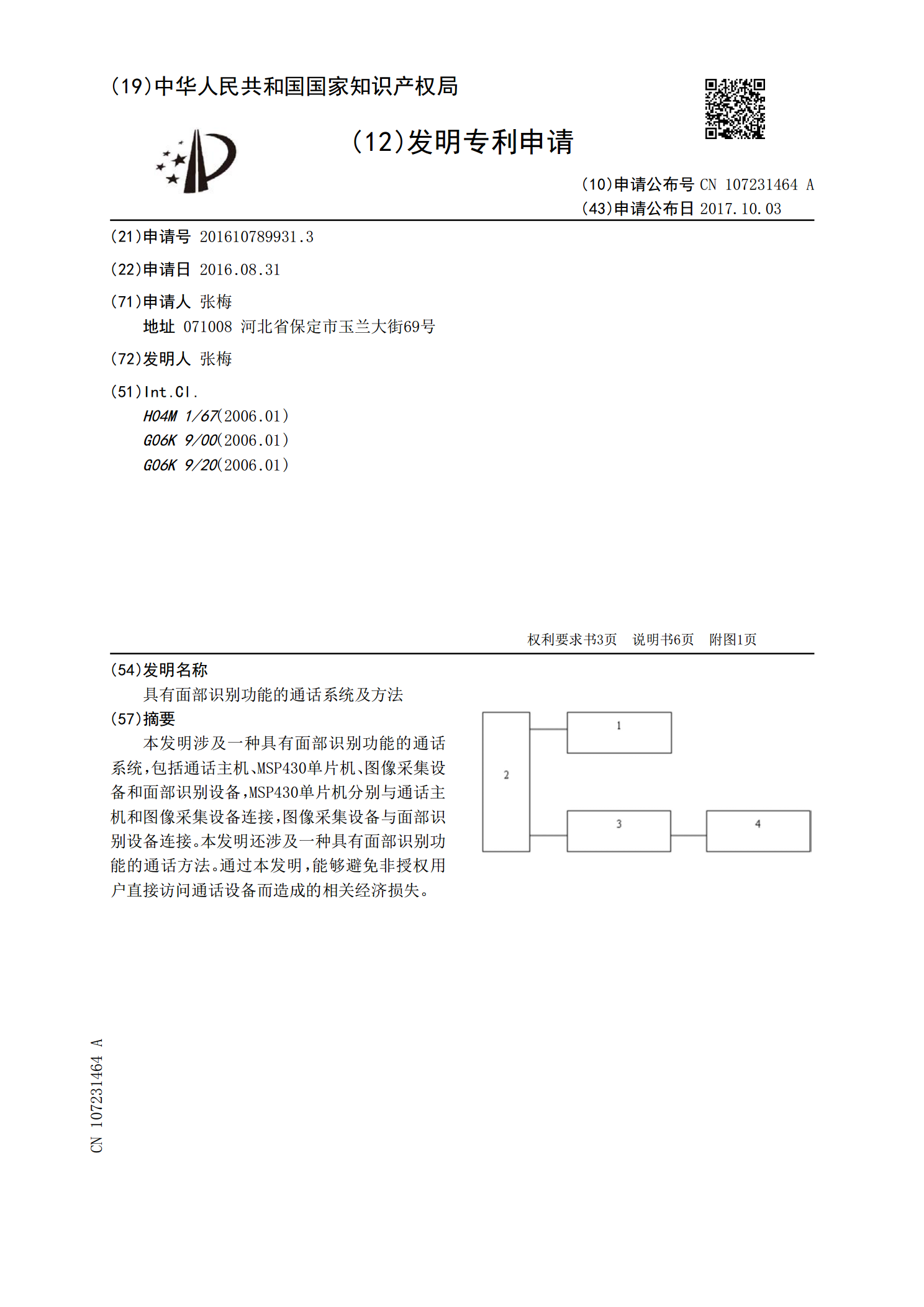
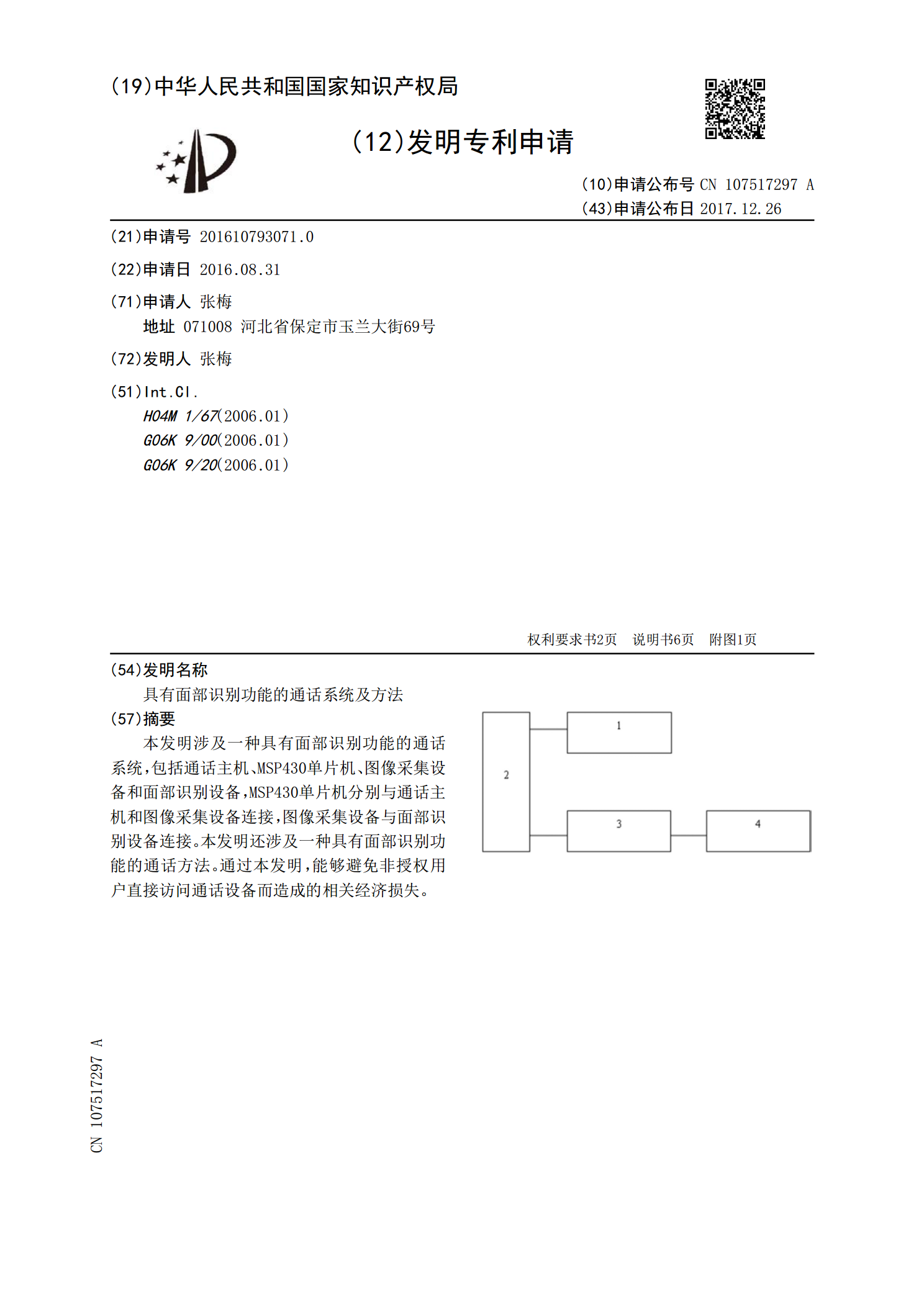
具有面部识别功能的通话系统及方法.pdf
本发明涉及一种具有面部识别功能的通话系统,包括通话主机、MSP430单片机、图像采集设备和面部识别设备,MSP430单片机分别与通话主机和图像采集设备连接,图像采集设备与面部识别设备连接。本发明还涉及一种具有面部识别功能的通话方法。通过本发明,能够避免非授权用户直接访问通话设备而造成的相关经济损失。
具有面部识别功能的通话系统及方法.pdf
本发明涉及一种具有面部识别功能的通话系统,包括通话主机、MSP430单片机、图像采集设备和面部识别设备,MSP430单片机分别与通话主机和图像采集设备连接,图像采集设备与面部识别设备连接。本发明还涉及一种具有面部识别功能的通话方法。通过本发明,能够避免非授权用户直接访问通话设备而造成的相关经济损失。