
具有目标识别功能的无人值守船舶系统.pdf

小忆****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
具有目标识别功能的无人值守船舶系统.pdf
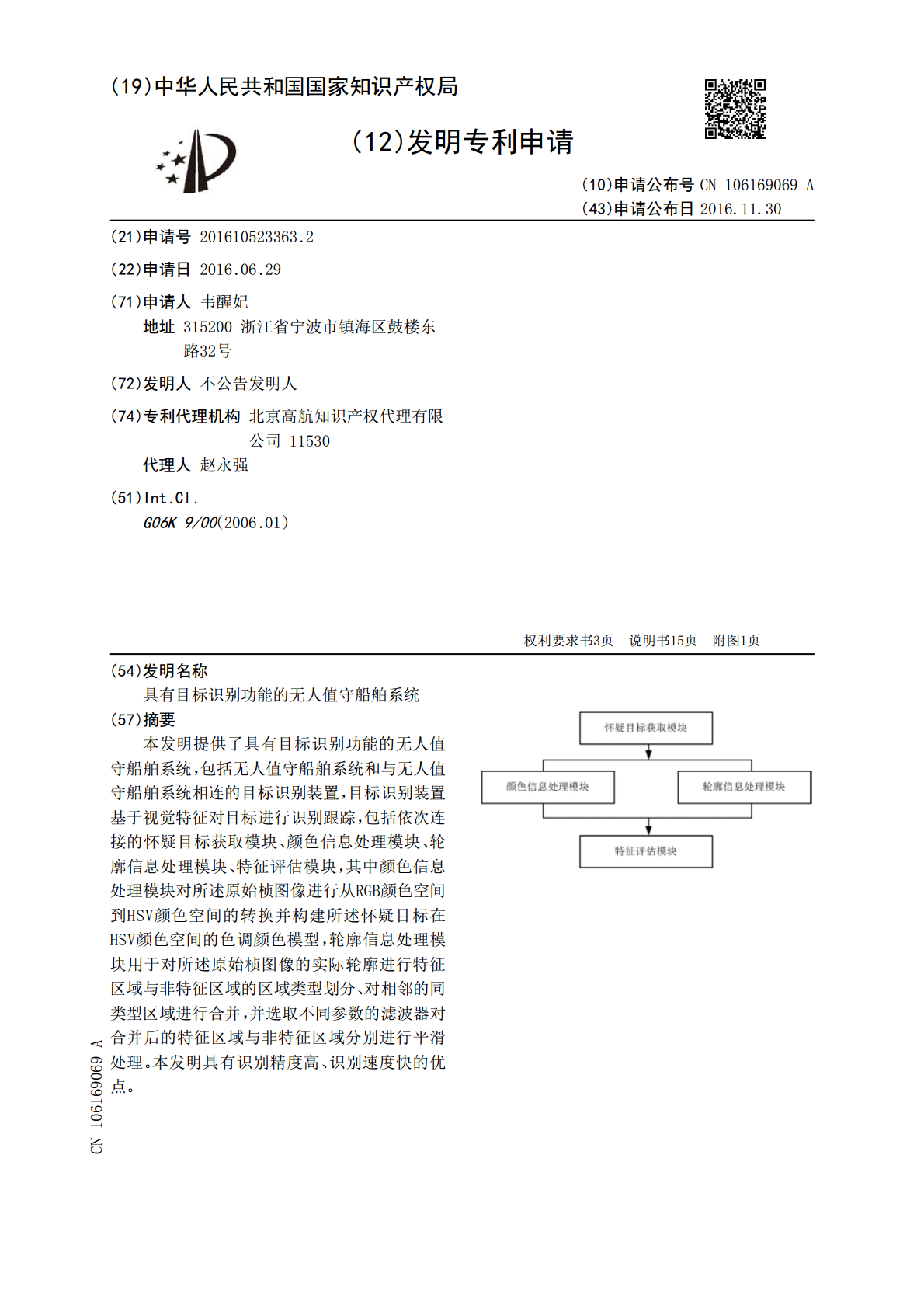
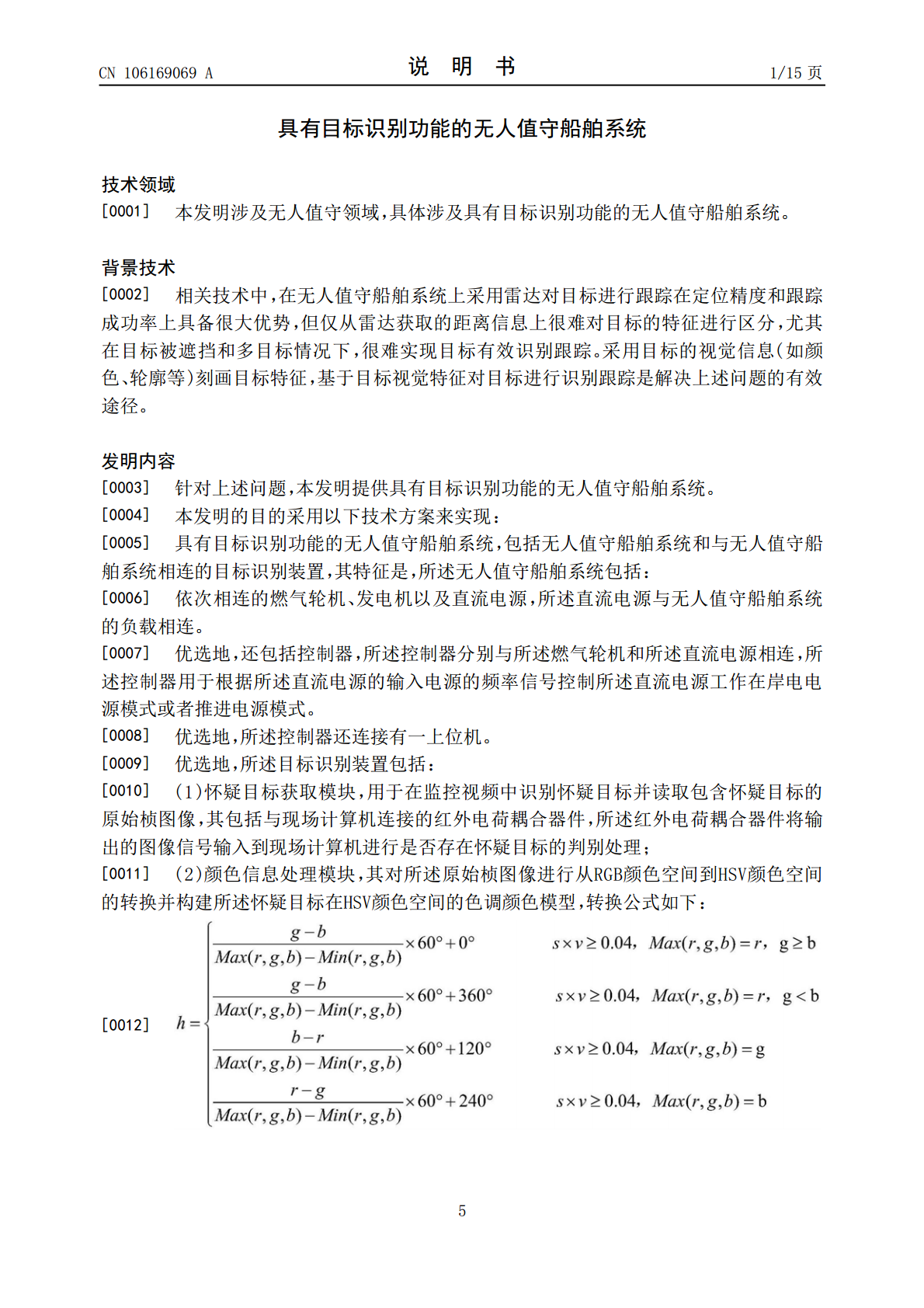
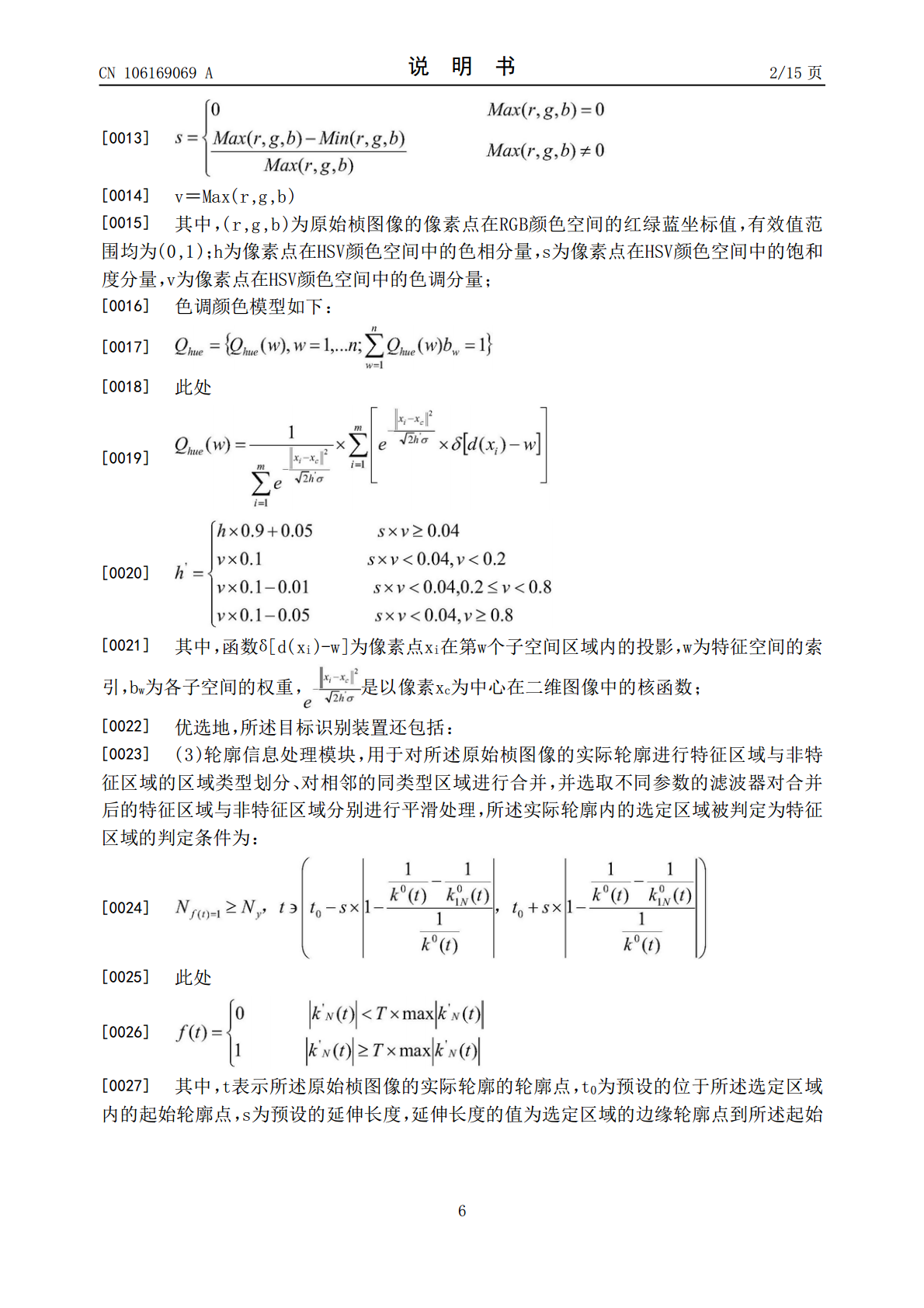
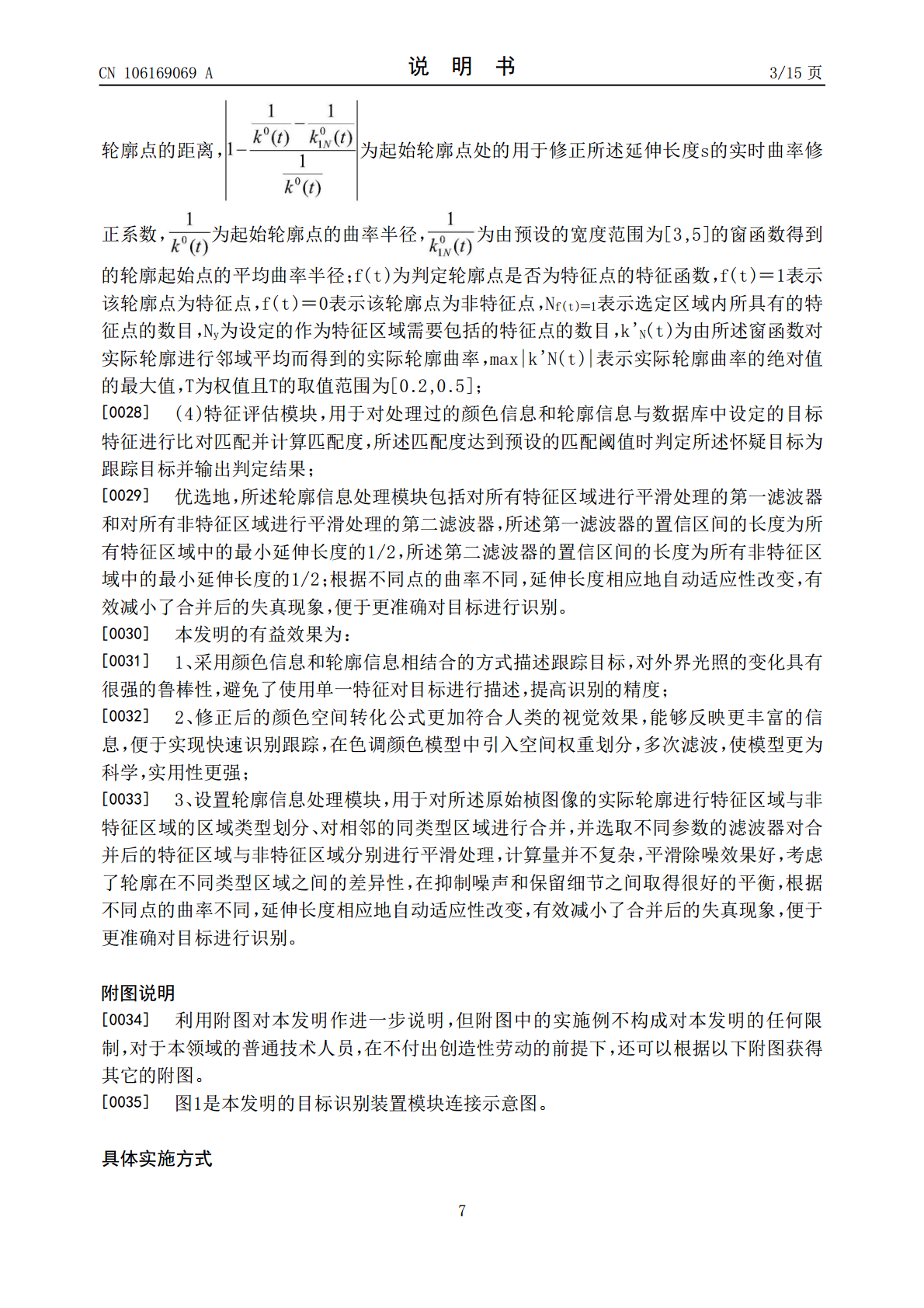
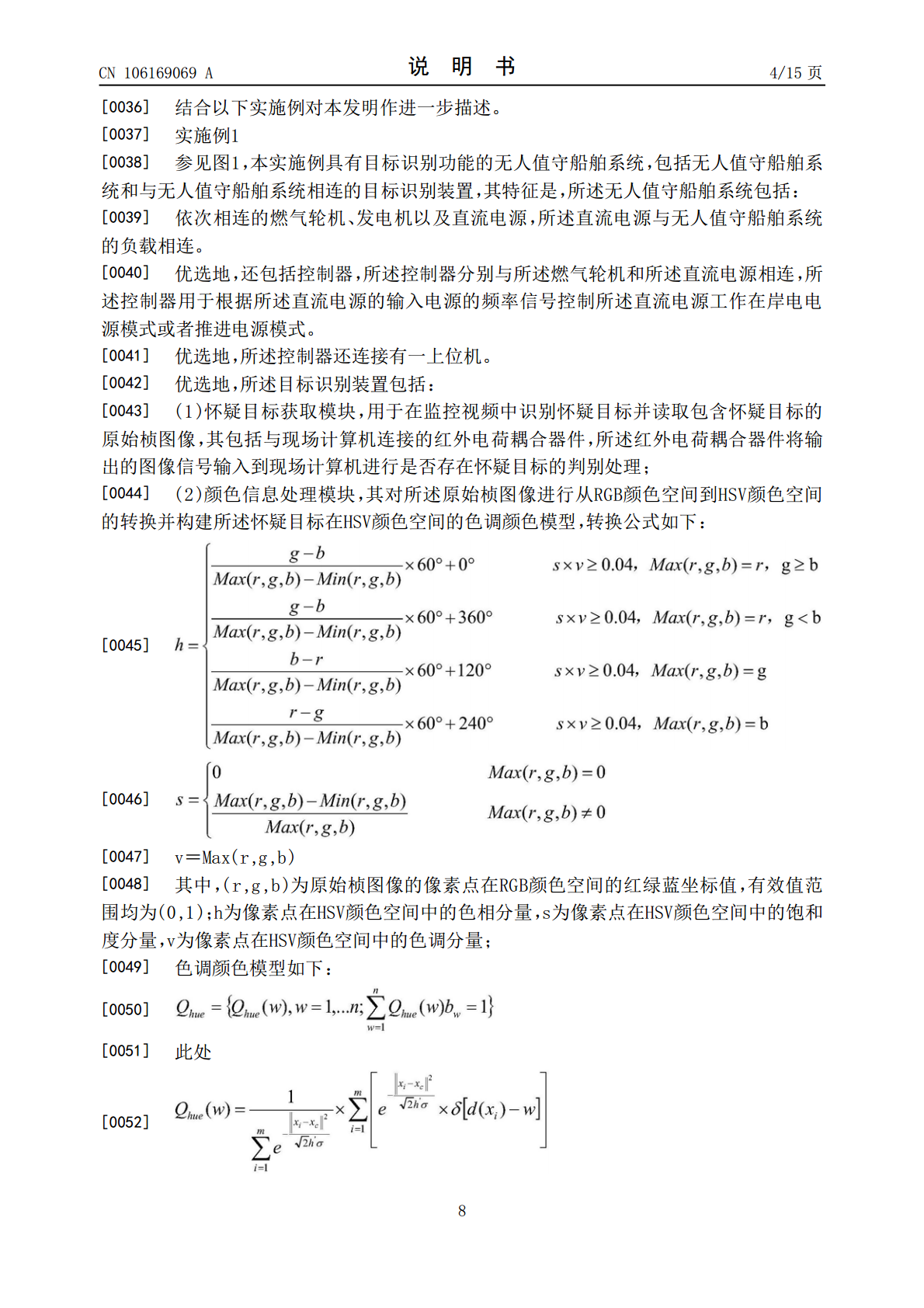
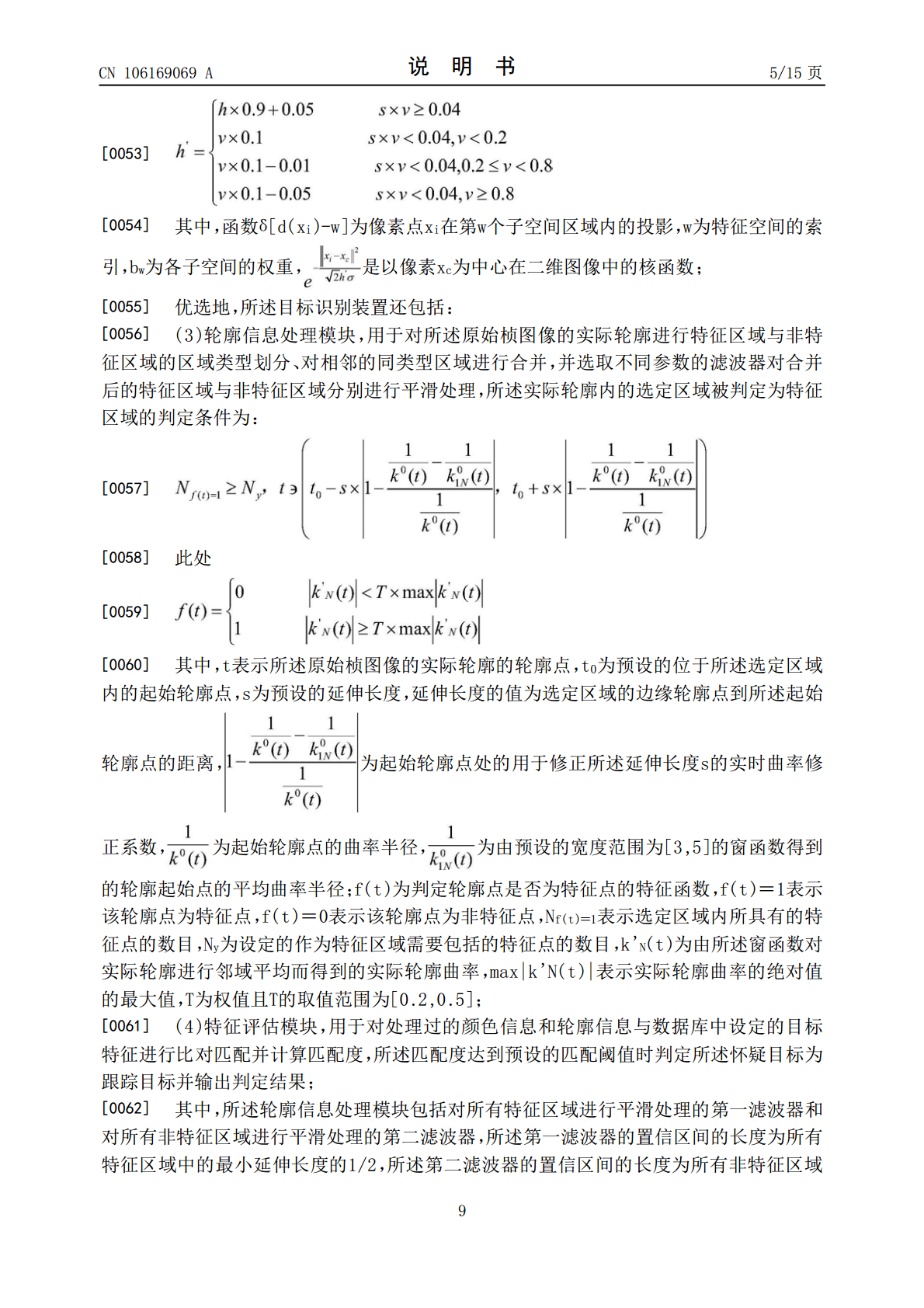
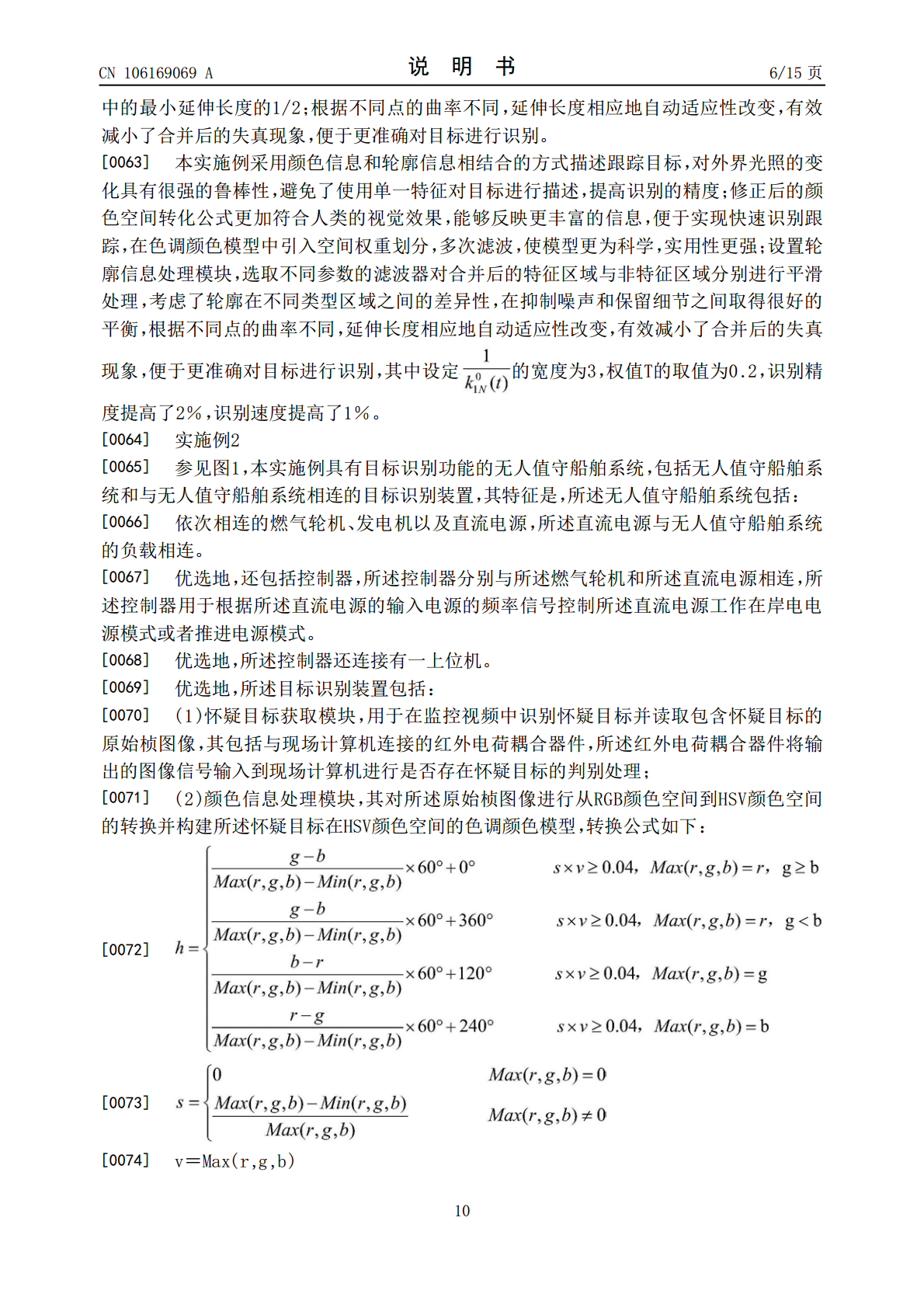
本发明提供了具有目标识别功能的无人值守船舶系统,包括无人值守船舶系统和与无人值守船舶系统相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特

具有智能摄像功能的无人值守货架.pdf
本发明公开了具有智能摄像功能的无人值守货架,具体涉及到无人值守货架的改进方面。包括货架、摄像模组、线缆保护杆、外壳、热释电传感器模块,主控板,电池组;货架最下面的隔板留有空间放置外壳;摄像模组用线缆联主控板,安装在货架上端右侧,录制视频。线缆保护杆,保护线缆,穿过每层隔板右上角,外壳用螺丝固定在货架内部右下角,外表面预留穿孔,用于热释电传感器探测波长;热释电传感器模块,用柔性PCB连主控板,为系统启停开关,人体靠近输出高电平。电池组用固定件安装于外壳内部,为货架配重,为系统供电;主控板用螺丝安装与外壳内侧

一种无人值守船舶直流电源控制器及无人值守船舶系统.pdf
本发明公开了一种无人值守船舶直流电源控制器,包括通讯相连的母板和子板,母板包括温度检测单元、模拟量信号采集单元、数字量信号采集单元和同步信号频率采集单元;同步信号频率采集单元采集无人值守船舶的直流电源的输入电源频率并发送至子板,子板识别出输入电源的频率以控制直流电源的工作模式。本发明还公开了一种无人值守船舶系统,包括依次相连的燃气轮机、发电机以及直流电源,直流电源与无人值守船舶系统的负载相连,还包括如上所述的控制器,控制器用于根据直流电源的输入电源的频率信号控制直流电源工作在岸电电源模式或者推进电源模式。

具有目标识别功能的汽车监控系统.pdf
本发明提供了具有目标识别功能的汽车监控系统,包括汽车监控系统和与汽车监控系统相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特征区域与非特
全功能无人值守远程监控汽化调压系统.pdf
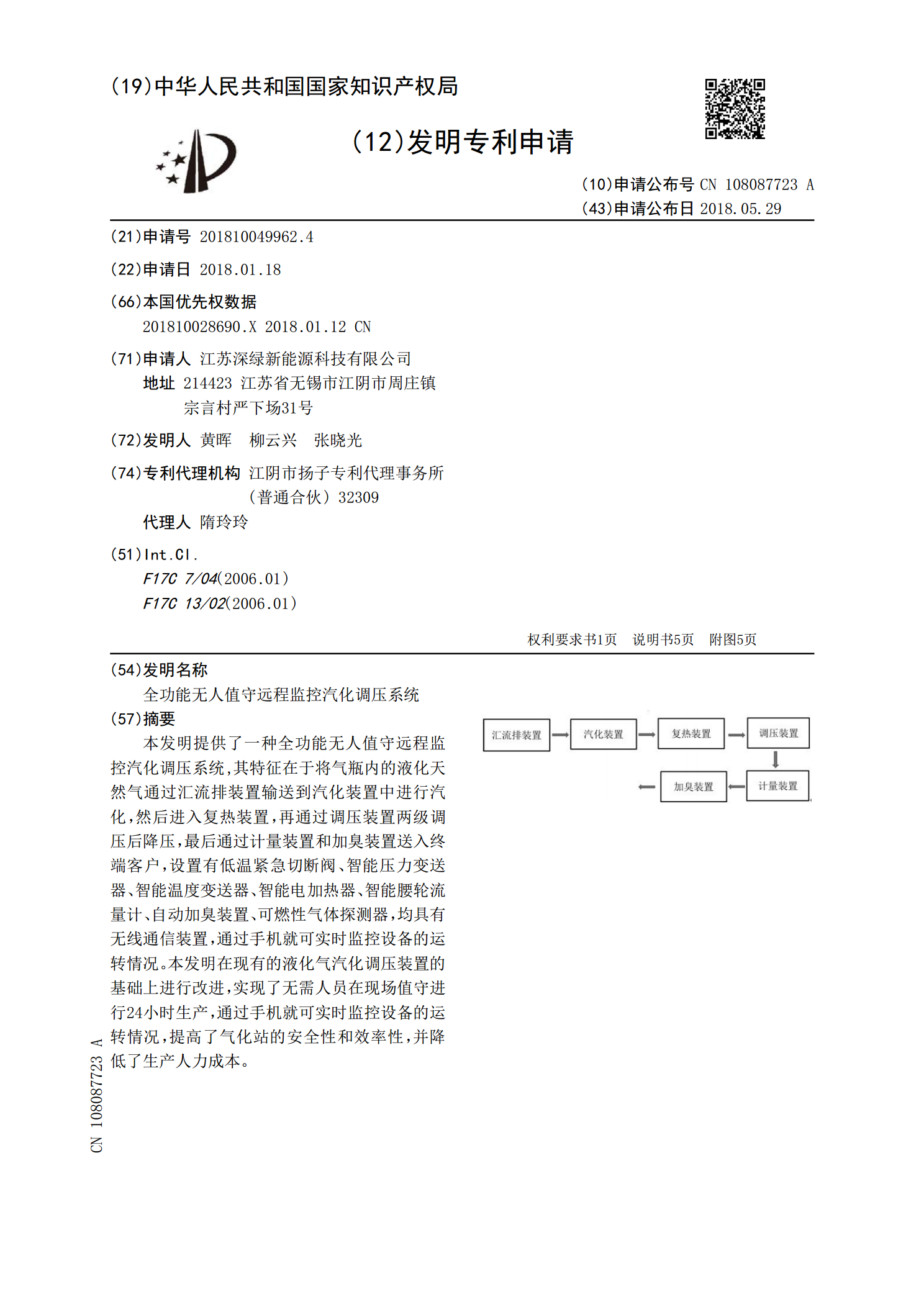
本发明提供了一种全功能无人值守远程监控汽化调压系统,其特征在于将气瓶内的液化天然气通过汇流排装置输送到汽化装置中进行汽化,然后进入复热装置,再通过调压装置两级调压后降压,最后通过计量装置和加臭装置送入终端客户,设置有低温紧急切断阀、智能压力变送器、智能温度变送器、智能电加热器、智能腰轮流量计、自动加臭装置、可燃性气体探测器,均具有无线通信装置,通过手机就可实时监控设备的运转情况。本发明在现有的液化气汽化调压装置的基础上进行改进,实现了无需人员在现场值守进行24小时生产,通过手机就可实时监控设备的运转情况,