
一种能够自主识别的激光切割装置.pdf

傲丝****账号


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
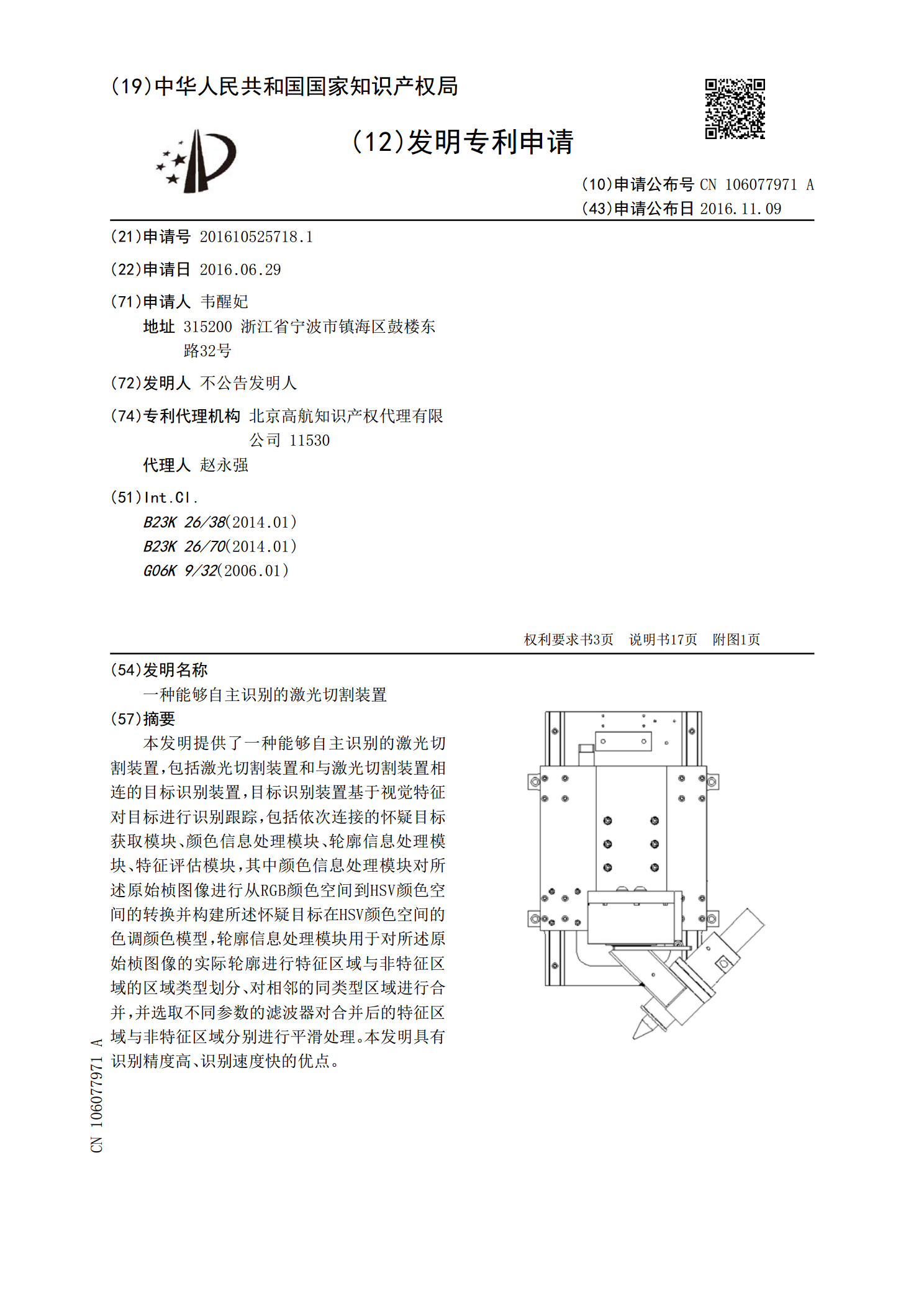
一种能够自主识别的激光切割装置.pdf
本发明提供了一种能够自主识别的激光切割装置,包括激光切割装置和与激光切割装置相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特征区域与非特

一种能够自主切割的激光切割装置.pdf
本发明公开了一种能够自主切割的激光切割装置,包括普通激光切割装置和安装在激光切割装置上的目标识别装置,识别装置包括建模模块、分段模块、合并模块和滤波模块。本发明通过在激光切割装置上加装目标识别装置,能够有效增强激光切割装置的自适应切割能力,激光切割装置通过目标轮廓识别目标,识别过程中能有效滤除目标轮廓噪声,从而根据目标形状进行切割。
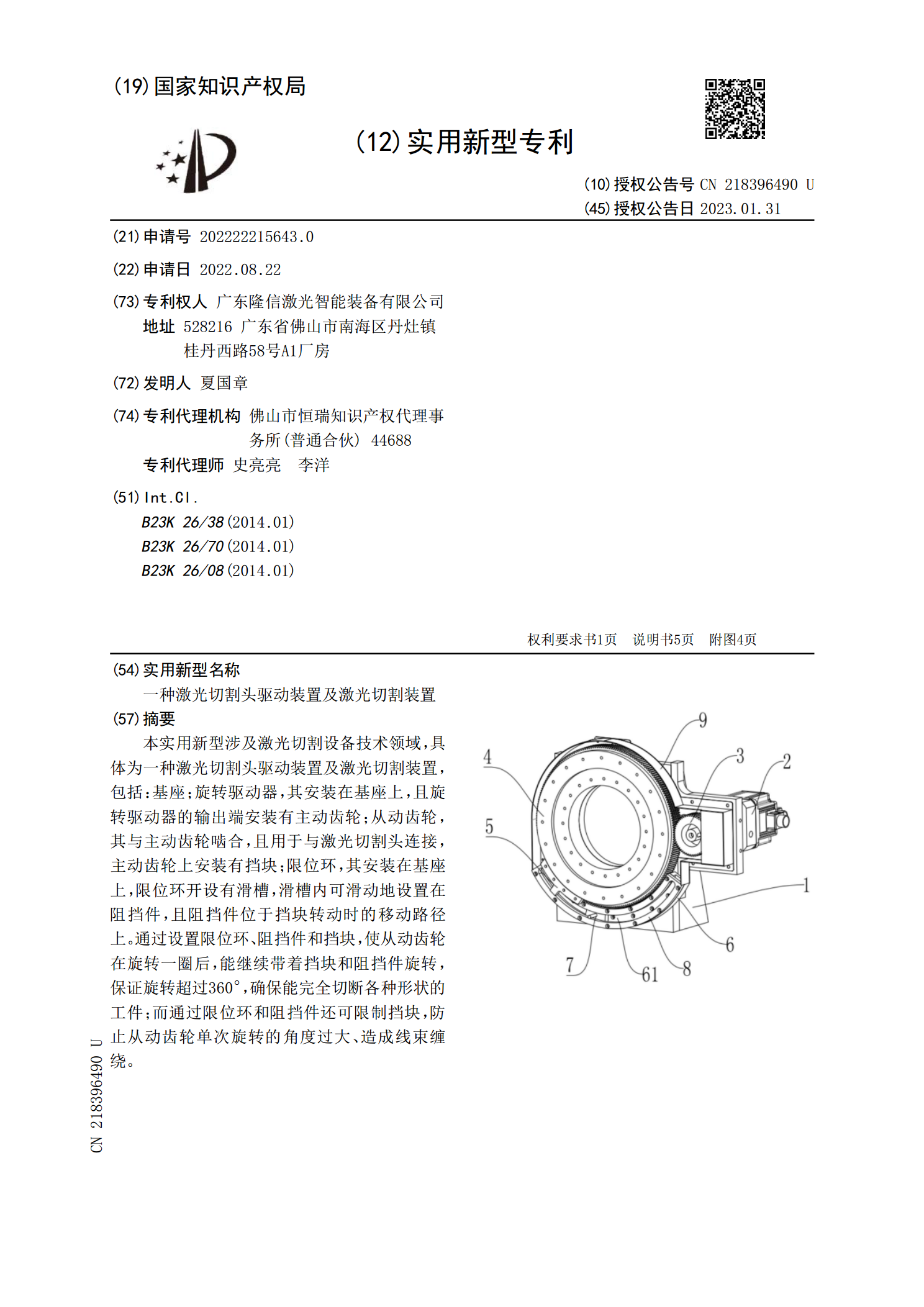
一种激光切割头驱动装置及激光切割装置.pdf
本实用新型涉及激光切割设备技术领域,具体为一种激光切割头驱动装置及激光切割装置,包括:基座;旋转驱动器,其安装在基座上,且旋转驱动器的输出端安装有主动齿轮;从动齿轮,其与主动齿轮啮合,且用于与激光切割头连接,主动齿轮上安装有挡块;限位环,其安装在基座上,限位环开设有滑槽,滑槽内可滑动地设置在阻挡件,且阻挡件位于挡块转动时的移动路径上。通过设置限位环、阻挡件和挡块,使从动齿轮在旋转一圈后,能继续带着挡块和阻挡件旋转,保证旋转超过360°,确保能完全切断各种形状的工件;而通过限位环和阻挡件还可限制挡块,防止从
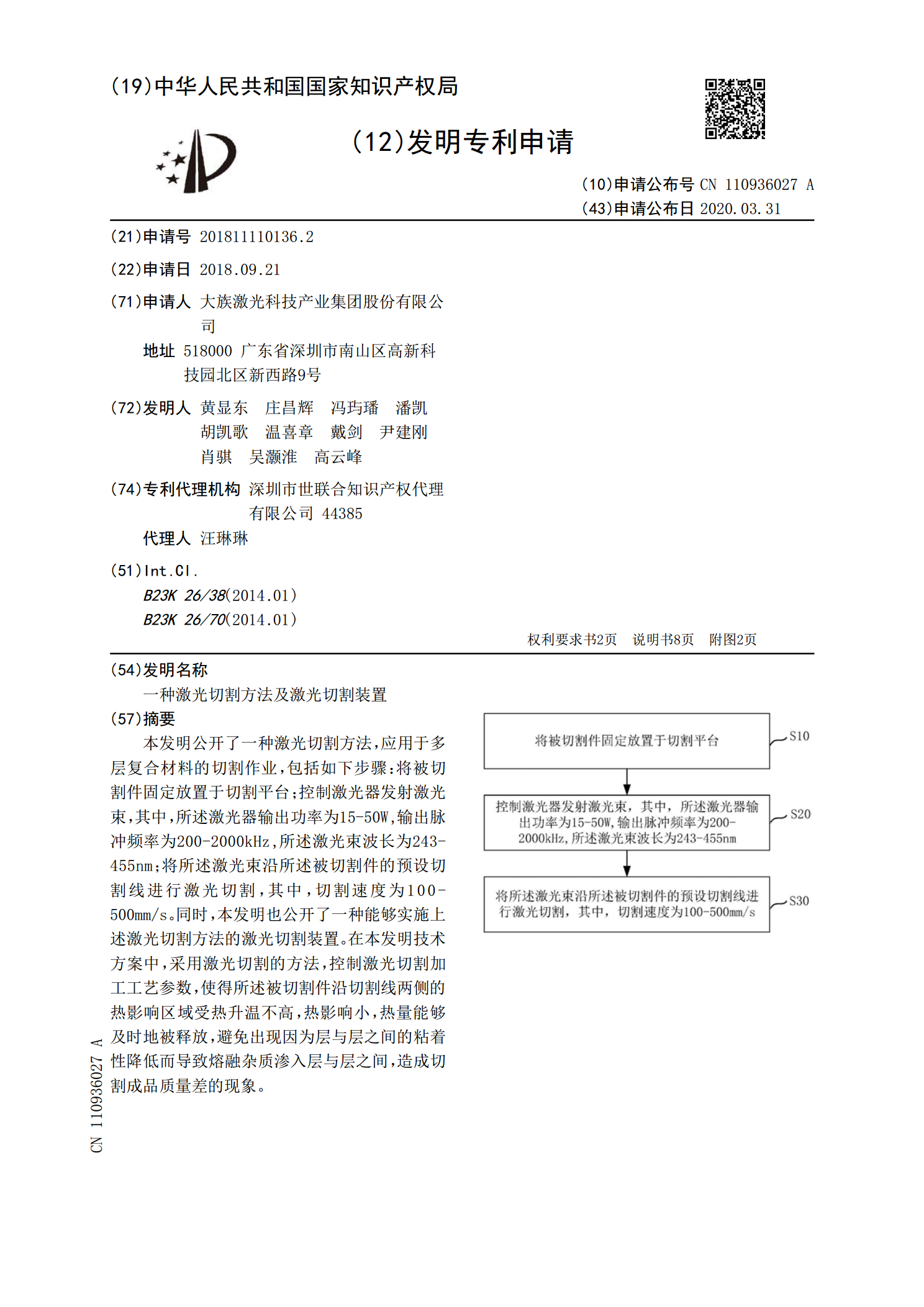
一种激光切割方法及激光切割装置.pdf
本发明公开了一种激光切割方法,应用于多层复合材料的切割作业,包括如下步骤:将被切割件固定放置于切割平台;控制激光器发射激光束,其中,所述激光器输出功率为15‑50W,输出脉冲频率为200‑2000kHz,所述激光束波长为243‑455nm;将所述激光束沿所述被切割件的预设切割线进行激光切割,其中,切割速度为100‑500mm/s。同时,本发明也公开了一种能够实施上述激光切割方法的激光切割装置。在本发明技术方案中,采用激光切割的方法,控制激光切割加工工艺参数,使得所述被切割件沿切割线两侧的热影响区域受热升温

一种能够连续输送的板材激光切割设备.pdf
本发明涉及一种能够连续输送的板材激光切割设备,包括下框和上框,下框上设置有中部开设有输送槽的支撑架,支撑架上设置有输送装置,输送装置包括设置在支撑架上的输送带,输送带的下方设置有插入到输送槽内的输送齿条,输送齿条配合有带驱动的输送齿轮,所述的输送带上设置有与产品的凹口配合的输送卡位块,且输送带上还设置有竖直走向的输送支撑块,输送支撑块的上部为圆弧形,且输送支撑块的高度与产品主体板下侧面与凹口下侧面的距离一致,产品相邻两个凹口中心的间距为输送齿条上相邻齿间距的整数倍,上框下方沿输送方向依次设置有与产品配合的