
一种模块化柔索并联机构实验平台及其自重构方法.pdf

努力****幻翠


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种模块化柔索并联机构实验平台及其自重构方法.pdf
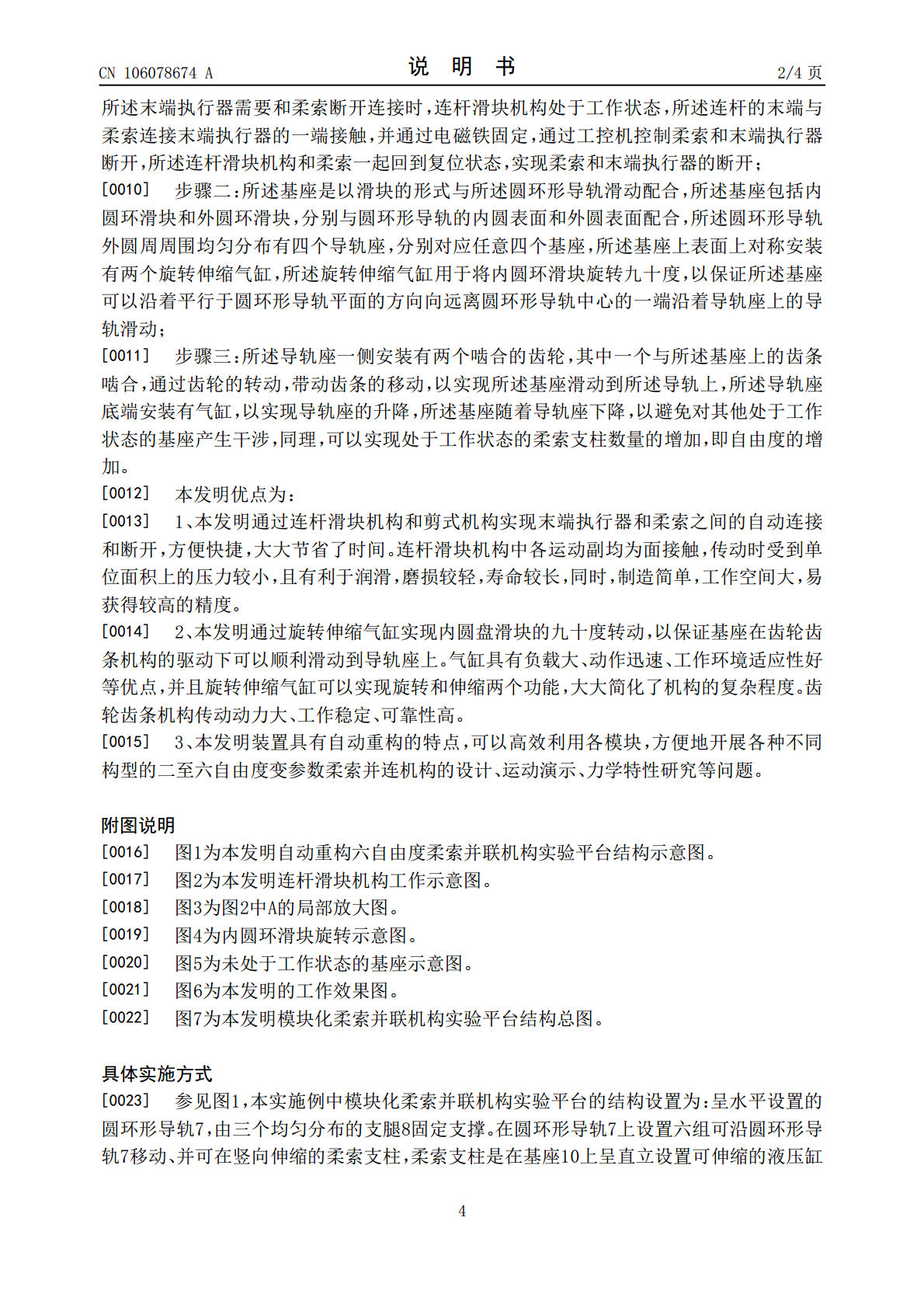
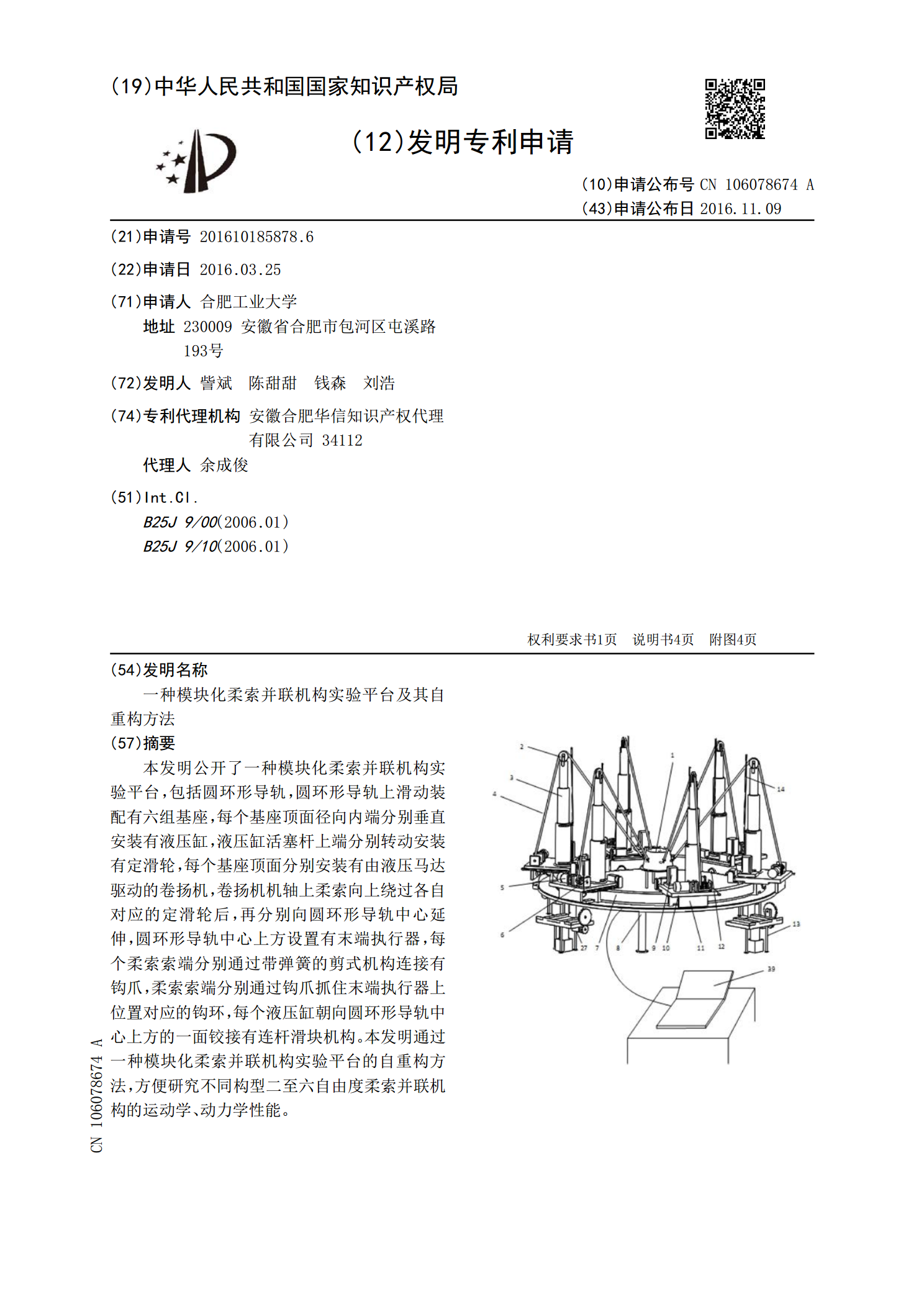
本发明公开了一种模块化柔索并联机构实验平台,包括圆环形导轨,圆环形导轨上滑动装配有六组基座,每个基座顶面径向内端分别垂直安装有液压缸,液压缸活塞杆上端分别转动安装有定滑轮,每个基座顶面分别安装有由液压马达驱动的卷扬机,卷扬机机轴上柔索向上绕过各自对应的定滑轮后,再分别向圆环形导轨中心延伸,圆环形导轨中心上方设置有末端执行器,每个柔索索端分别通过带弹簧的剪式机构连接有钩爪,柔索索端分别通过钩爪抓住末端执行器上位置对应的钩环,每个液压缸朝向圆环形导轨中心上方的一面铰接有连杆滑块机构。本发明通过一种模块化柔索并
模块化可重构柔索并联机器人变刚度控制装置及方法.pdf
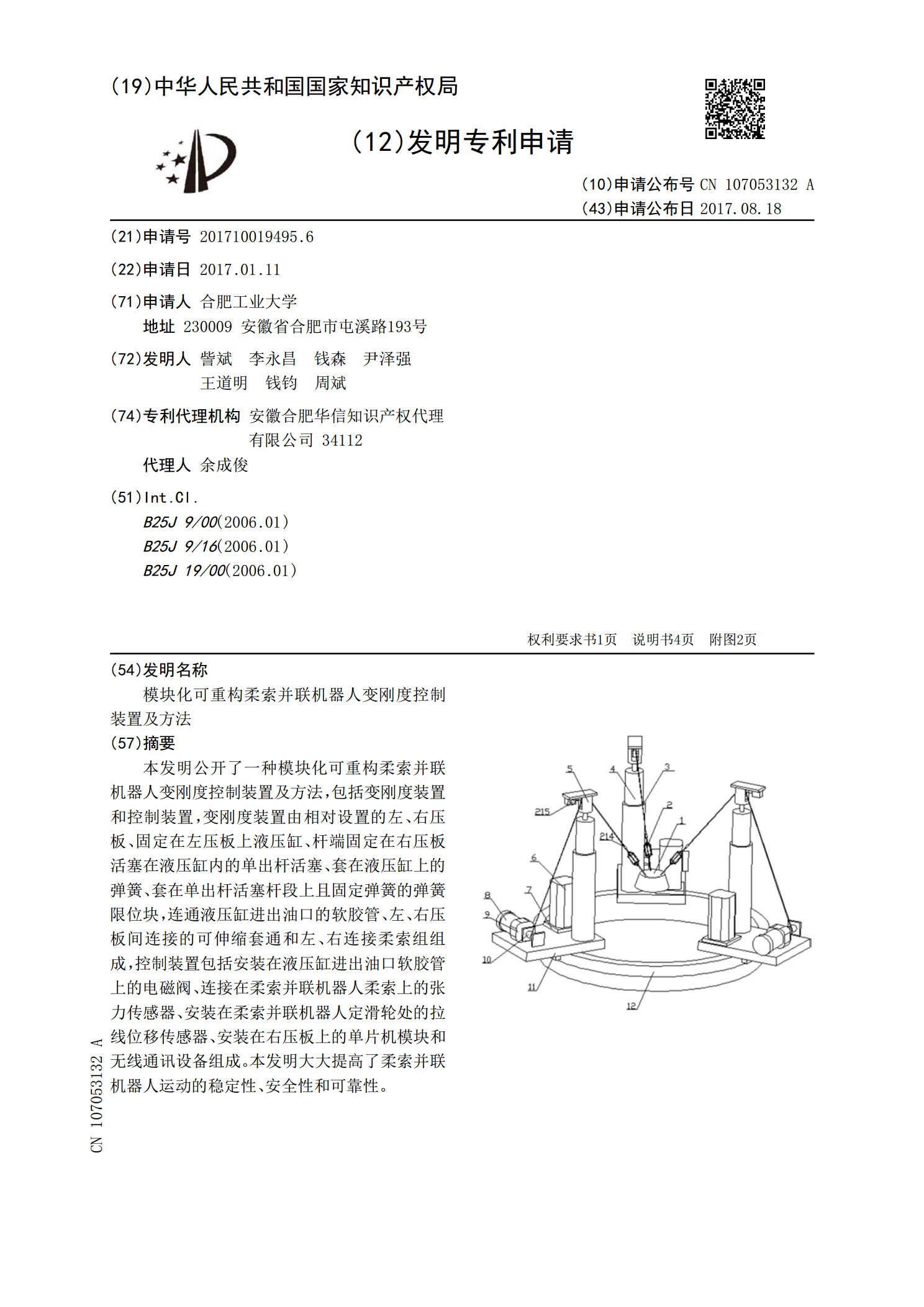
本发明公开了一种模块化可重构柔索并联机器人变刚度控制装置及方法,包括变刚度装置和控制装置,变刚度装置由相对设置的左、右压板、固定在左压板上液压缸、杆端固定在右压板活塞在液压缸内的单出杆活塞、套在液压缸上的弹簧、套在单出杆活塞杆段上且固定弹簧的弹簧限位块,连通液压缸进出油口的软胶管、左、右压板间连接的可伸缩套通和左、右连接柔索组组成,控制装置包括安装在液压缸进出油口软胶管上的电磁阀、连接在柔索并联机器人柔索上的张力传感器、安装在柔索并联机器人定滑轮处的拉线位移传感器、安装在右压板上的单片机模块和无线通讯设备

柔索驱动并联加工机构的力学建模与分析.docx
柔索驱动并联加工机构的力学建模与分析随着科技的不断发展,越来越多的加工工序被自动化,其中并联加工机构由于其高效性和灵活性被广泛应用。柔索驱动并联加工机构是一种新型的并联机构,利用一些柔性零部件将驱动力传递到接口,实现高精度、高速度、大范围和多维度的加工。本文将重点讨论柔索驱动并联加工机构的力学建模与分析。一、柔索驱动并联加工机构的结构特点柔索驱动并联加工机构具有以下三个特点:1.柔性传动:采用松紧可调节的柔性绳索传动,这种传动方式不仅可以提高机构的柔性及重载能力,而且可以削减传动误差,从而提高机构的可靠性

一种柔索并联驱动的喷涂机器人机构.pdf
本发明公开了一种柔索并联驱动的喷涂机器人机构,所述柔索并联喷涂机器人,由刚性支架、滚珠丝杠执行机构、滑轮、传动柔索、同步带、喷头以及驱动控制箱等部分组成。喷头由柔性钢索驱动,支撑柔索的滑轮可跟随螺母滑块沿导轨移动;螺母滑块由丝杆驱动,丝杆与电动机之间通过同步带传动。有益的技术效果:本发明所述的柔索并联驱动的喷涂机器人机构,采用柔索并联结构控制末端执行器,具有运动惯量小、动作灵敏等特点;驱动部分集中在底部的驱动控制箱中,使得驱动电路与外部环境隔离开来,实现防爆功能;传动部分结构紧凑,预留上下工件空间大。

一种基于并联柔索机构的重载吊装机器人.pdf
本发明属于先进制造与自动化领域,具体地说是一种基于并联柔索机构的重载吊装机器人,包括上平台、下平台和六根柔索,上平台为固定平台,下平台为运动平台,上平台和下平台以六根柔索相连构成Stewart型并联机构;每分支柔索通过定滑轮与电机卷筒与上平台相连,通过十字铰链与下平台相连;每分支的滑轮轴上安装编码器,可测量柔索长度变化;当上、下平台中心在同一铅垂线上且机器人动平台自然下垂平衡时,上平台滑轮中心点圆周半径和下平台的连接点圆周半径之间满足重力面条件,且各分支滑轮与转轴垂直的滑轮中心面与对应的重力面共面。本发明