
模块化可重构柔索并联机器人变刚度控制装置及方法.pdf

小代****回来

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
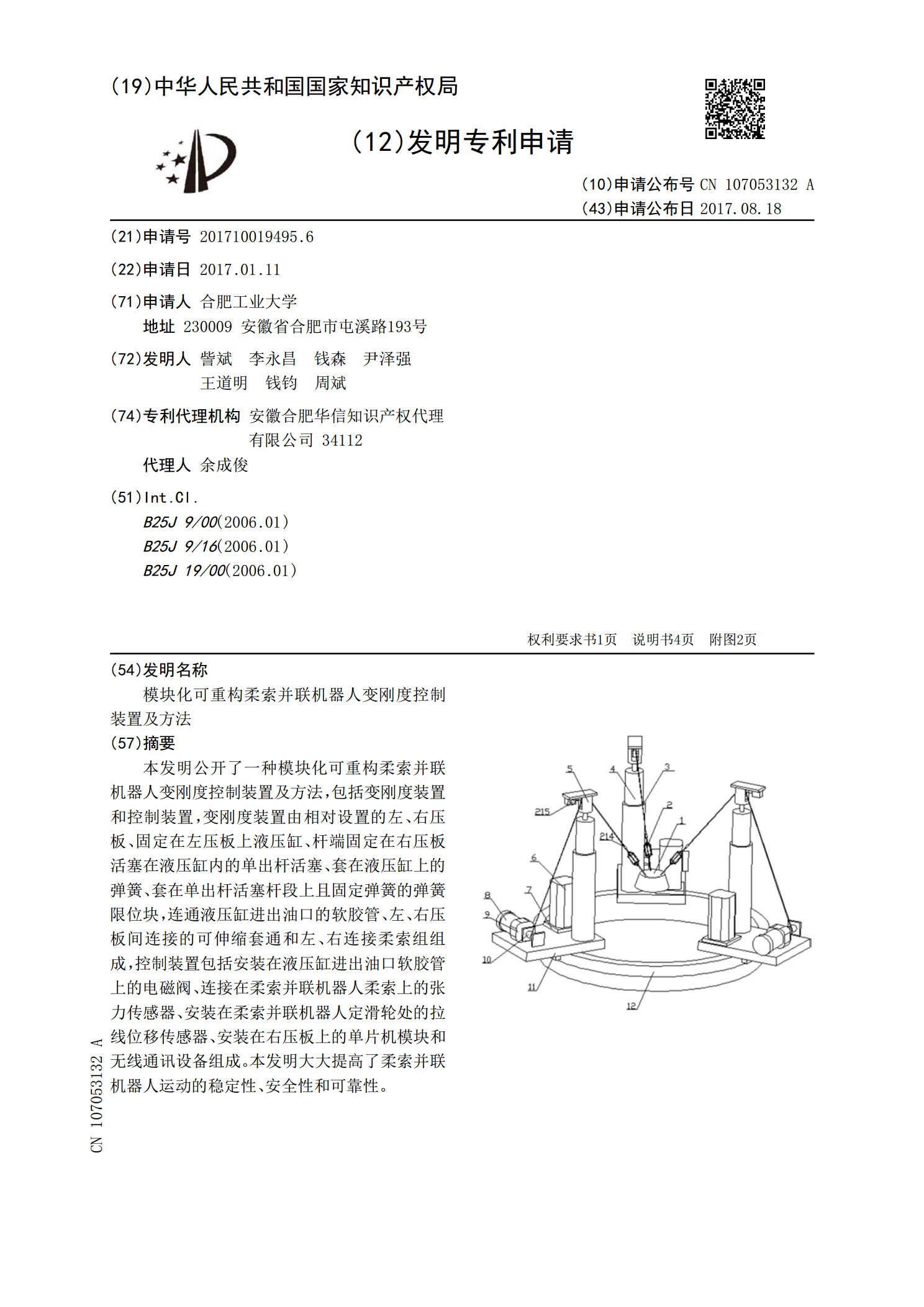
模块化可重构柔索并联机器人变刚度控制装置及方法.pdf
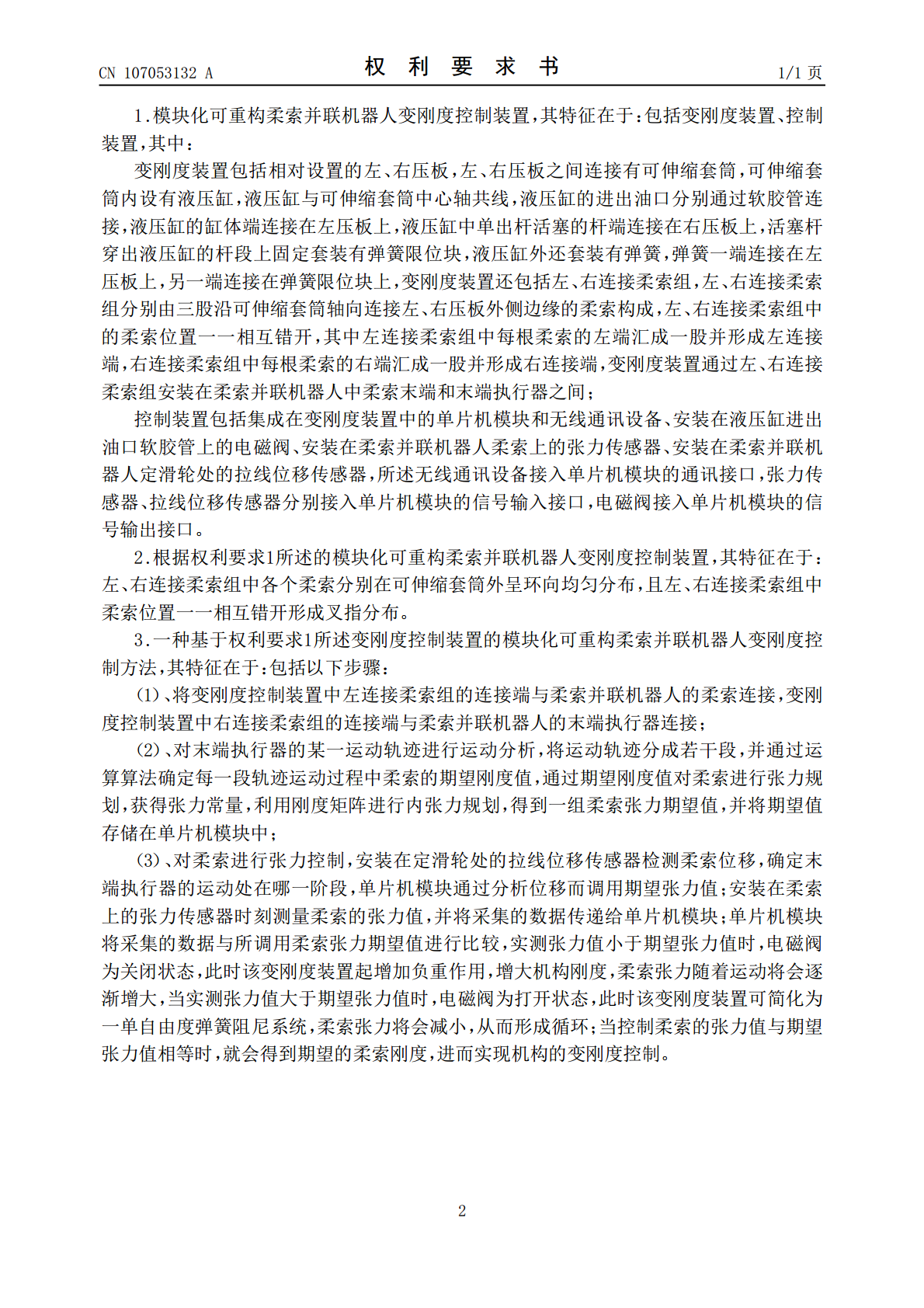
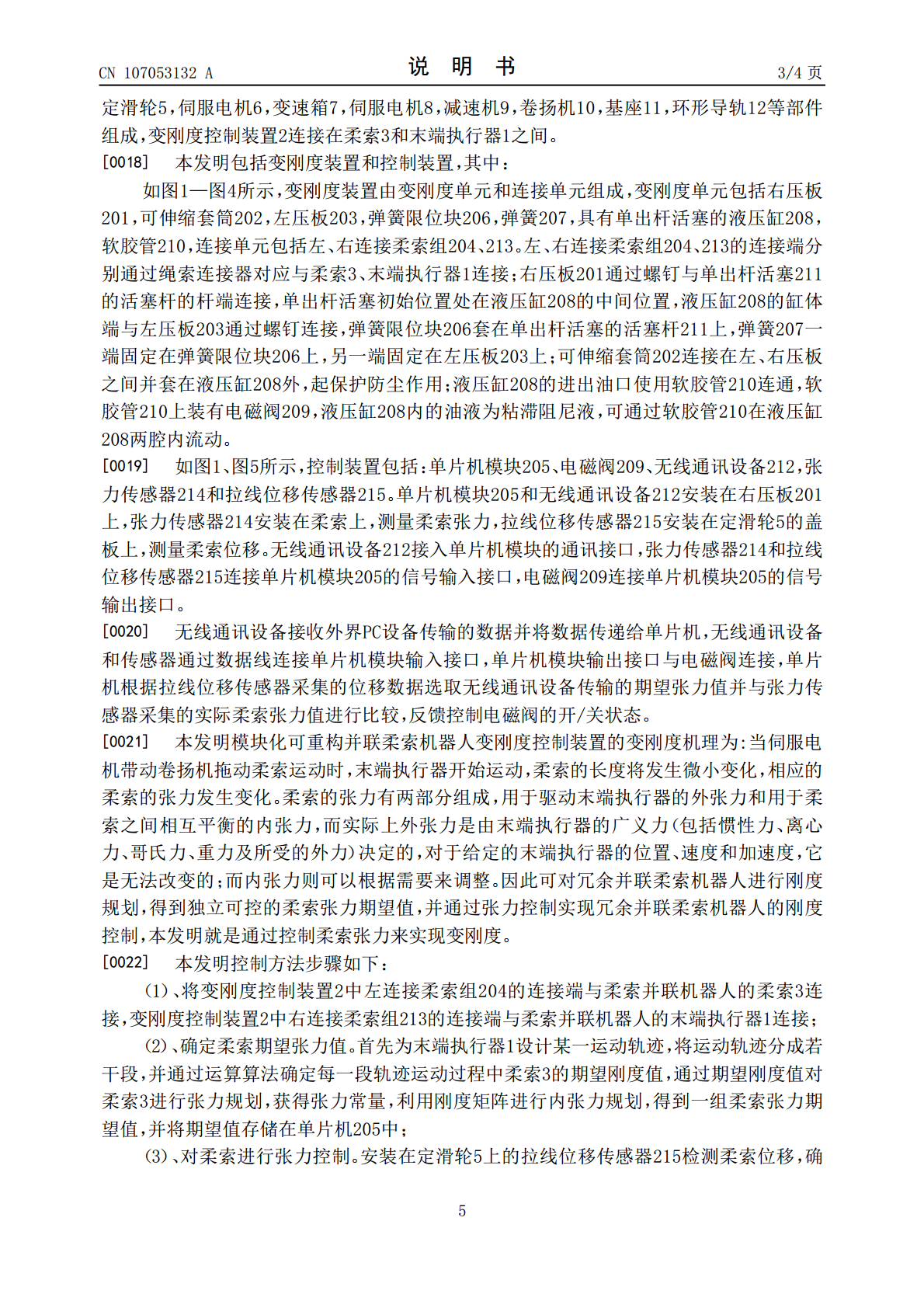
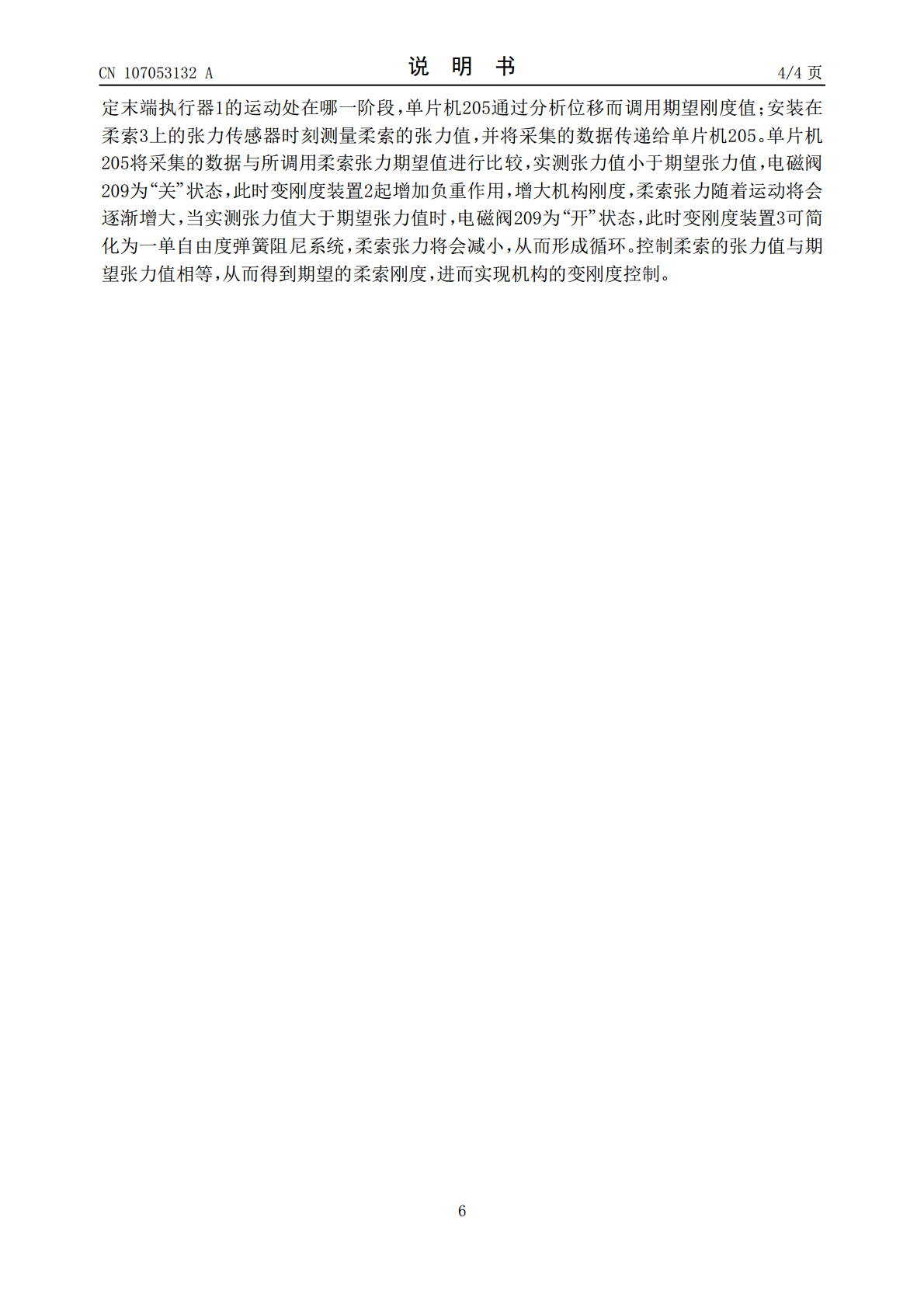
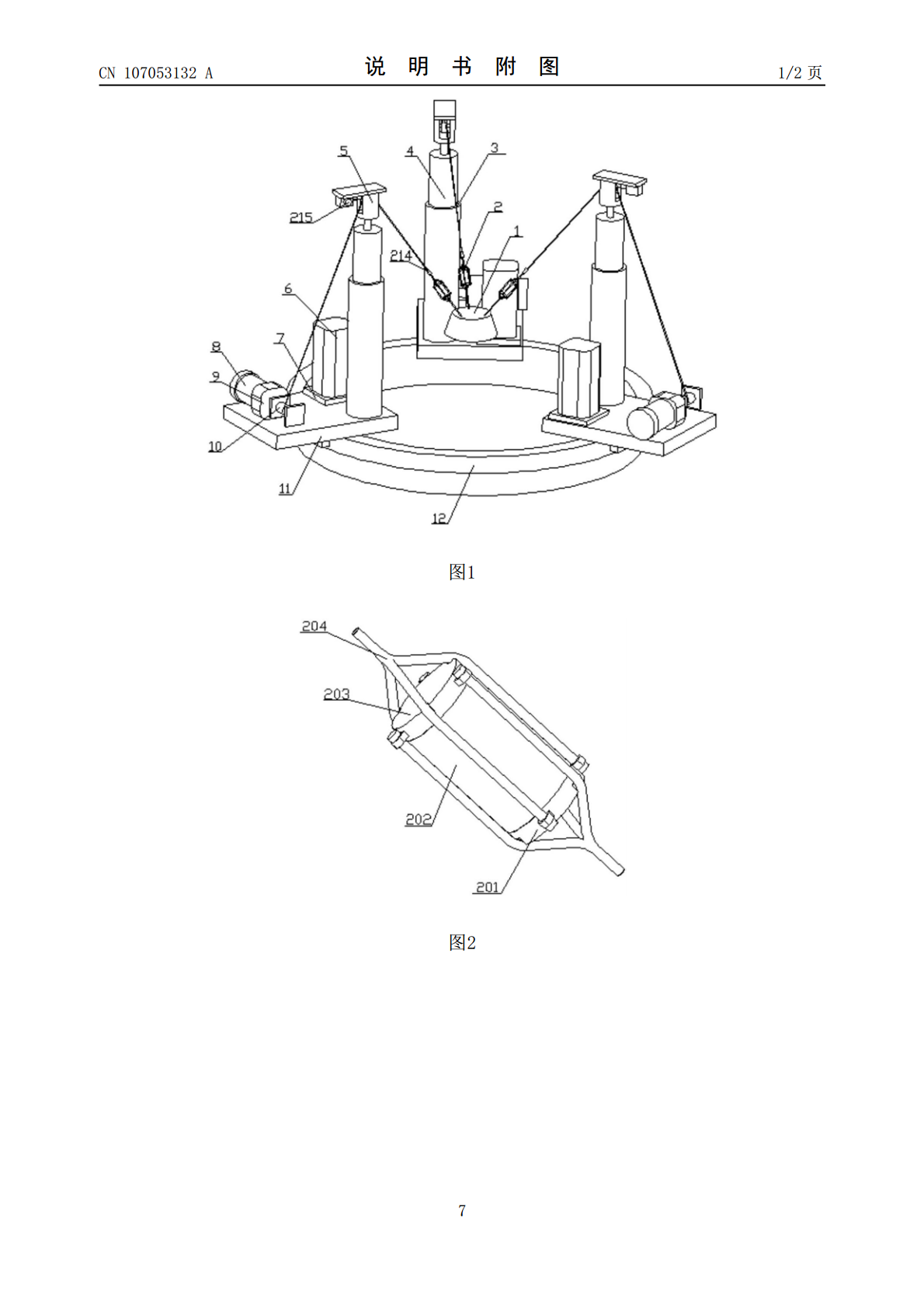
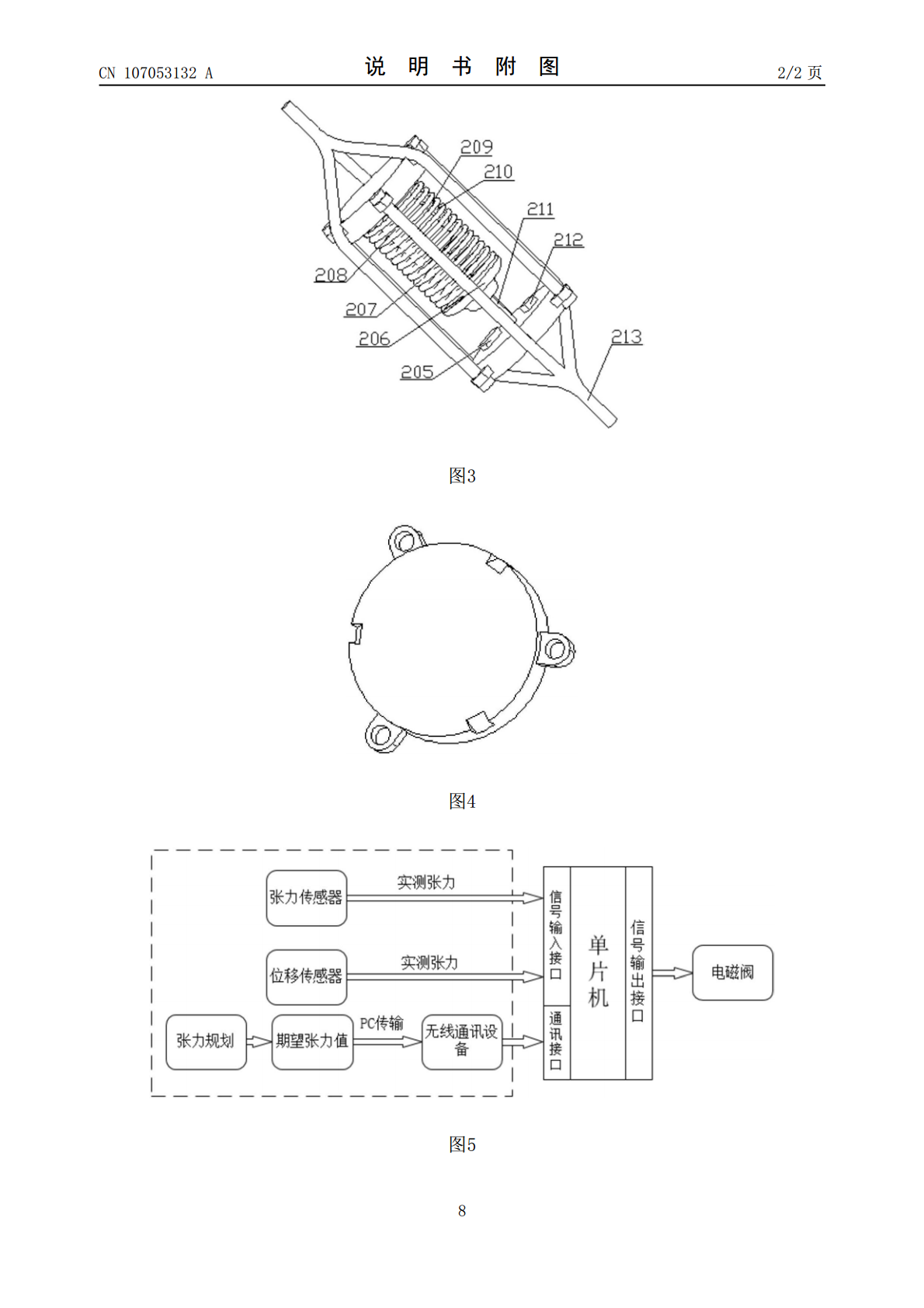
本发明公开了一种模块化可重构柔索并联机器人变刚度控制装置及方法,包括变刚度装置和控制装置,变刚度装置由相对设置的左、右压板、固定在左压板上液压缸、杆端固定在右压板活塞在液压缸内的单出杆活塞、套在液压缸上的弹簧、套在单出杆活塞杆段上且固定弹簧的弹簧限位块,连通液压缸进出油口的软胶管、左、右压板间连接的可伸缩套通和左、右连接柔索组组成,控制装置包括安装在液压缸进出油口软胶管上的电磁阀、连接在柔索并联机器人柔索上的张力传感器、安装在柔索并联机器人定滑轮处的拉线位移传感器、安装在右压板上的单片机模块和无线通讯设备
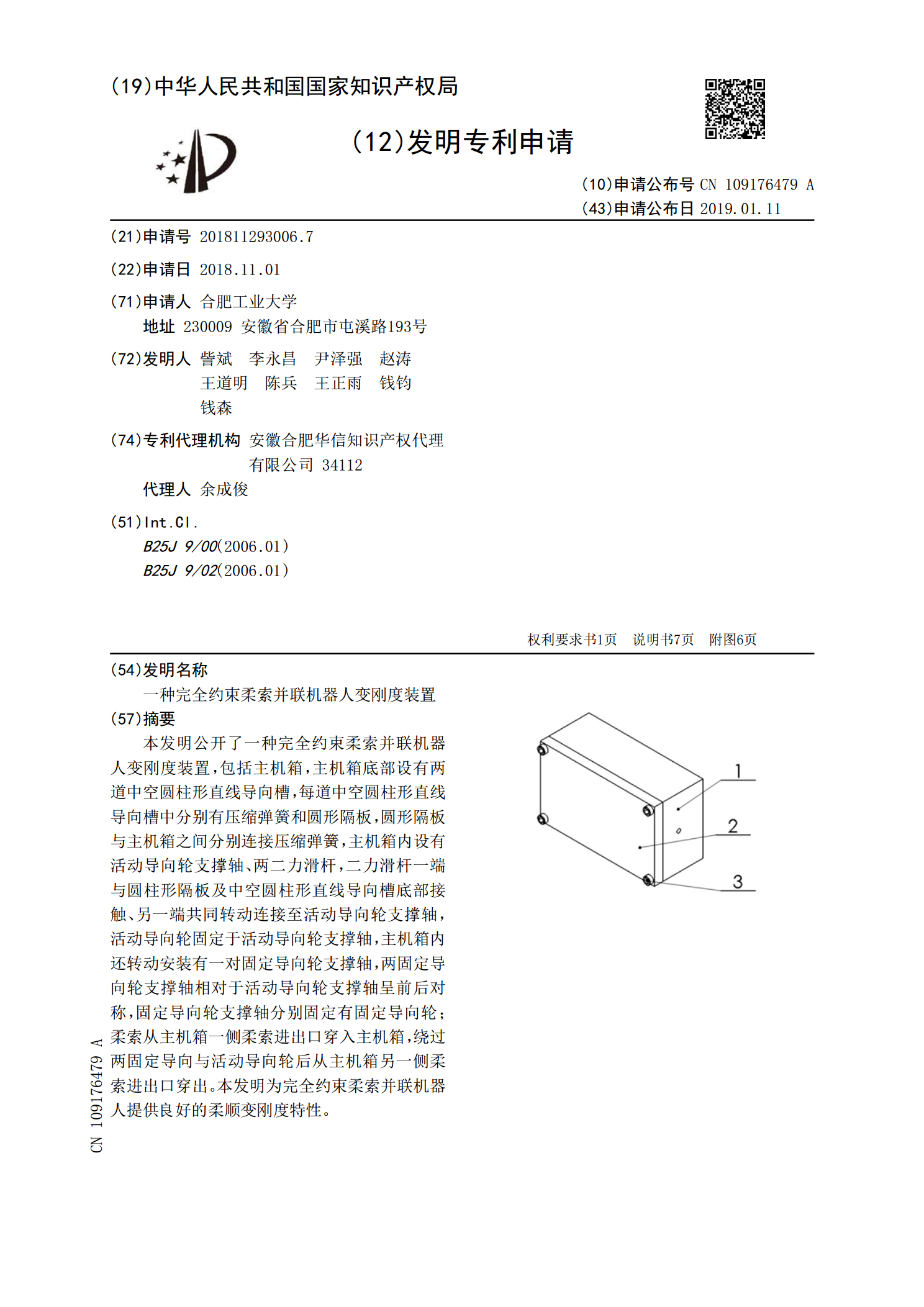
一种完全约束柔索并联机器人变刚度装置.pdf
本发明公开了一种完全约束柔索并联机器人变刚度装置,包括主机箱,主机箱底部设有两道中空圆柱形直线导向槽,每道中空圆柱形直线导向槽中分别有压缩弹簧和圆形隔板,圆形隔板与主机箱之间分别连接压缩弹簧,主机箱内设有活动导向轮支撑轴、两二力滑杆,二力滑杆一端与圆柱形隔板及中空圆柱形直线导向槽底部接触、另一端共同转动连接至活动导向轮支撑轴,活动导向轮固定于活动导向轮支撑轴,主机箱内还转动安装有一对固定导向轮支撑轴,两固定导向轮支撑轴相对于活动导向轮支撑轴呈前后对称,固定导向轮支撑轴分别固定有固定导向轮;柔索从主机箱一侧

基于深度学习的模块化可重构柔索并联机器人视觉系统研究的开题报告.docx
基于深度学习的模块化可重构柔索并联机器人视觉系统研究的开题报告一、研究背景和意义柔索并联机器人是目前机器人领域研究的热点之一,其具有曲线柔顺、反应快速、重量轻等优点,广泛应用于工业制造、医疗保健和救援等领域。然而,我国柔索并联机器人研究还处于起步阶段,特别是在视觉系统领域,由于传统视觉算法的固有局限性,难以满足复杂环境下机器人视觉系统的需求。因此,采用深度学习,结合模块化设计和可重构方法,开发出高效、精准、实时的柔索并联机器人视觉系统,对于我国柔索并联机器人的发展具有重要意义。二、研究内容和方法(一)研究

基于深度学习的模块化可重构柔索并联机器人视觉系统研究的任务书.docx
基于深度学习的模块化可重构柔索并联机器人视觉系统研究的任务书一、研究背景和意义随着机器人技术的不断发展,越来越多的机器人应用到生产和生活中。其中柔性并联机器人因其优越的运动灵活性、便捷的操作和智能化等特点,在工业自动化、航空制造、生物医学等领域中得到了广泛的应用。而柔性并联机器人的视觉系统则是它们智能化程度的关键因素之一。因此,开展基于深度学习的模块化可重构柔性并联机器人视觉系统研究,对于促进柔性并联机器人的智能化发展、提高生产自动化水平、缩短生产周期、提高产品的成品率和质量具有重要的意义。二、研究内容和
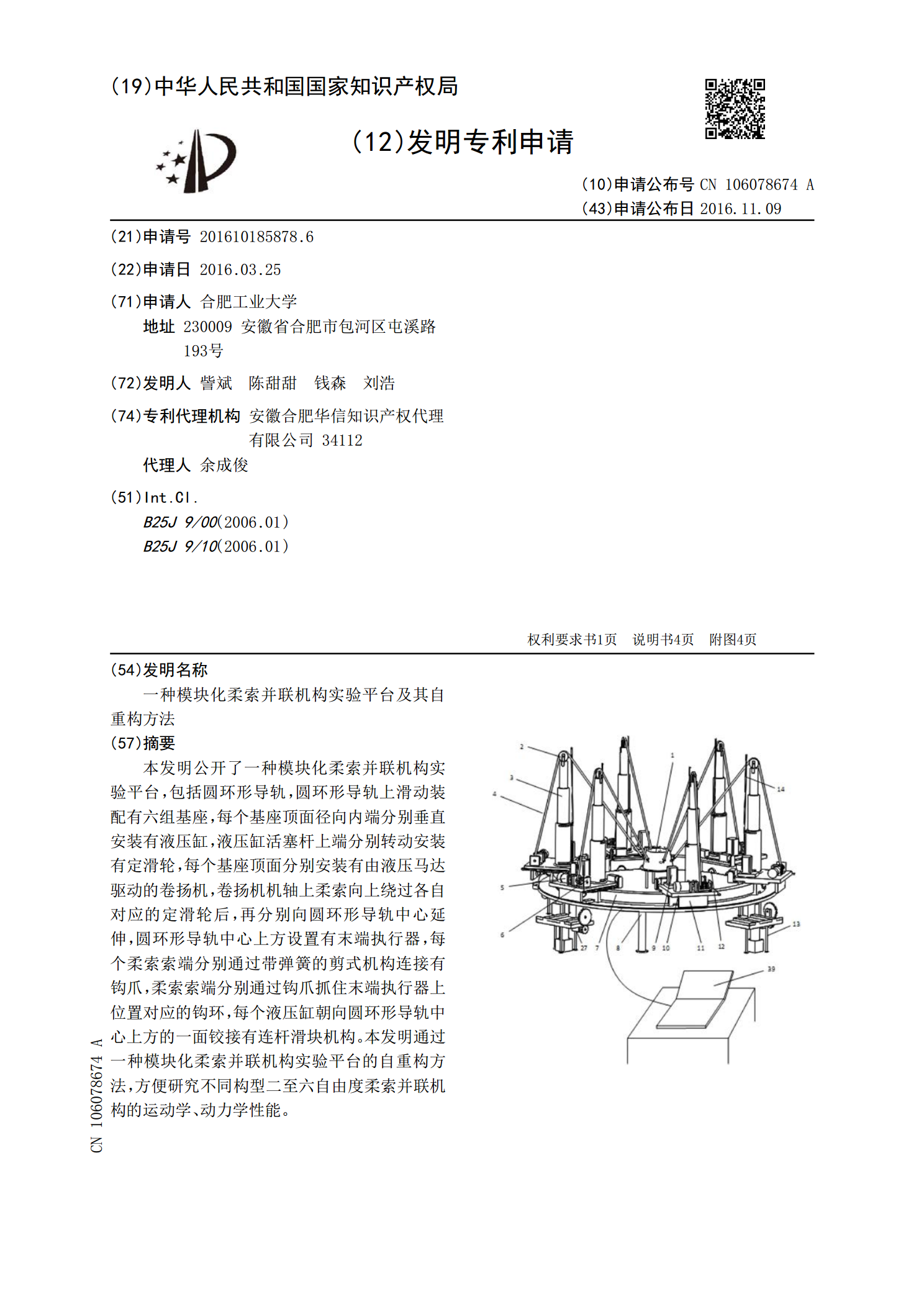
一种模块化柔索并联机构实验平台及其自重构方法.pdf
本发明公开了一种模块化柔索并联机构实验平台,包括圆环形导轨,圆环形导轨上滑动装配有六组基座,每个基座顶面径向内端分别垂直安装有液压缸,液压缸活塞杆上端分别转动安装有定滑轮,每个基座顶面分别安装有由液压马达驱动的卷扬机,卷扬机机轴上柔索向上绕过各自对应的定滑轮后,再分别向圆环形导轨中心延伸,圆环形导轨中心上方设置有末端执行器,每个柔索索端分别通过带弹簧的剪式机构连接有钩爪,柔索索端分别通过钩爪抓住末端执行器上位置对应的钩环,每个液压缸朝向圆环形导轨中心上方的一面铰接有连杆滑块机构。本发明通过一种模块化柔索并