
一种城轨列车轮缘参数在线检测系统及方法.pdf

春岚****23


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种城轨列车轮缘参数在线检测系统及方法.pdf
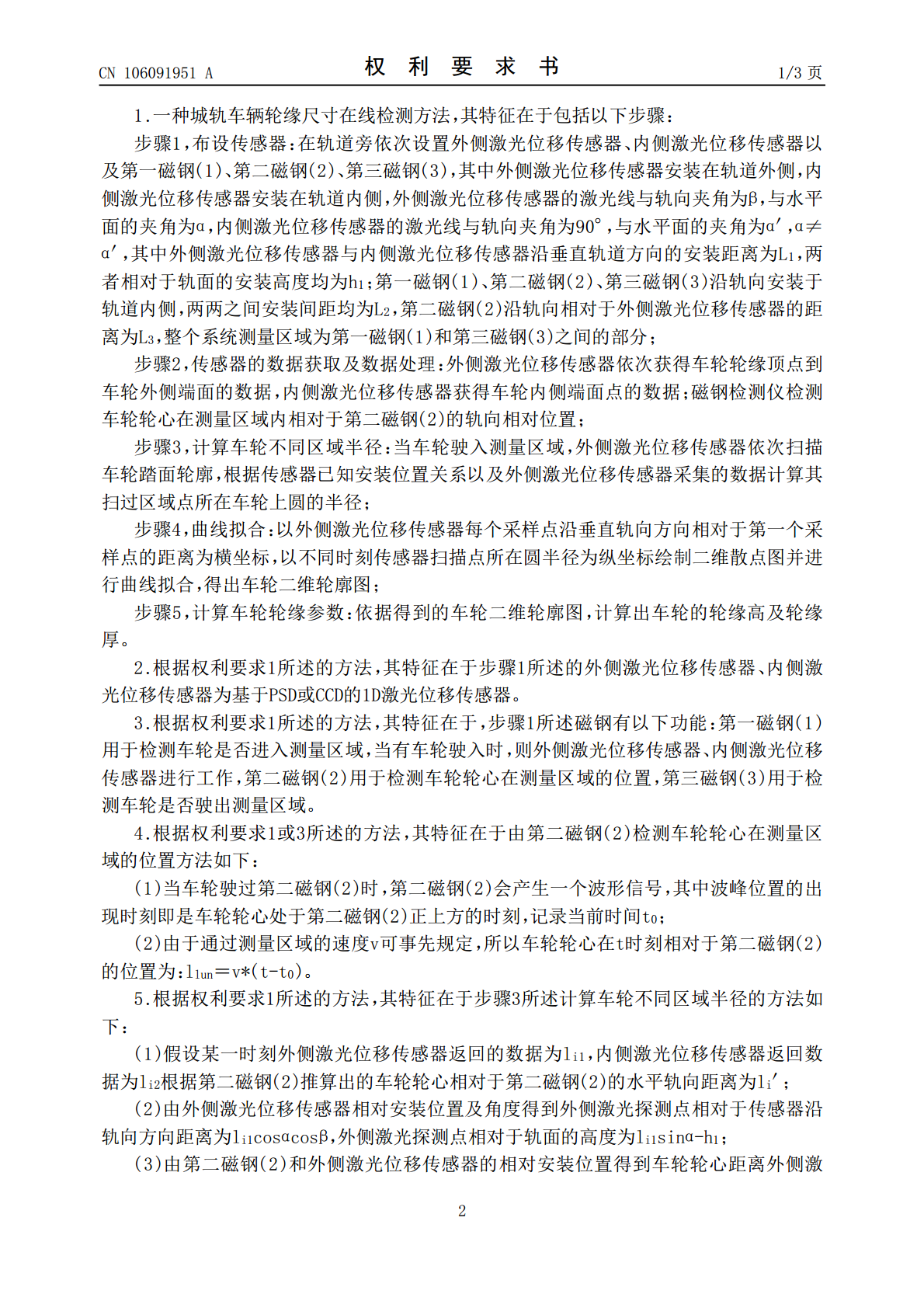
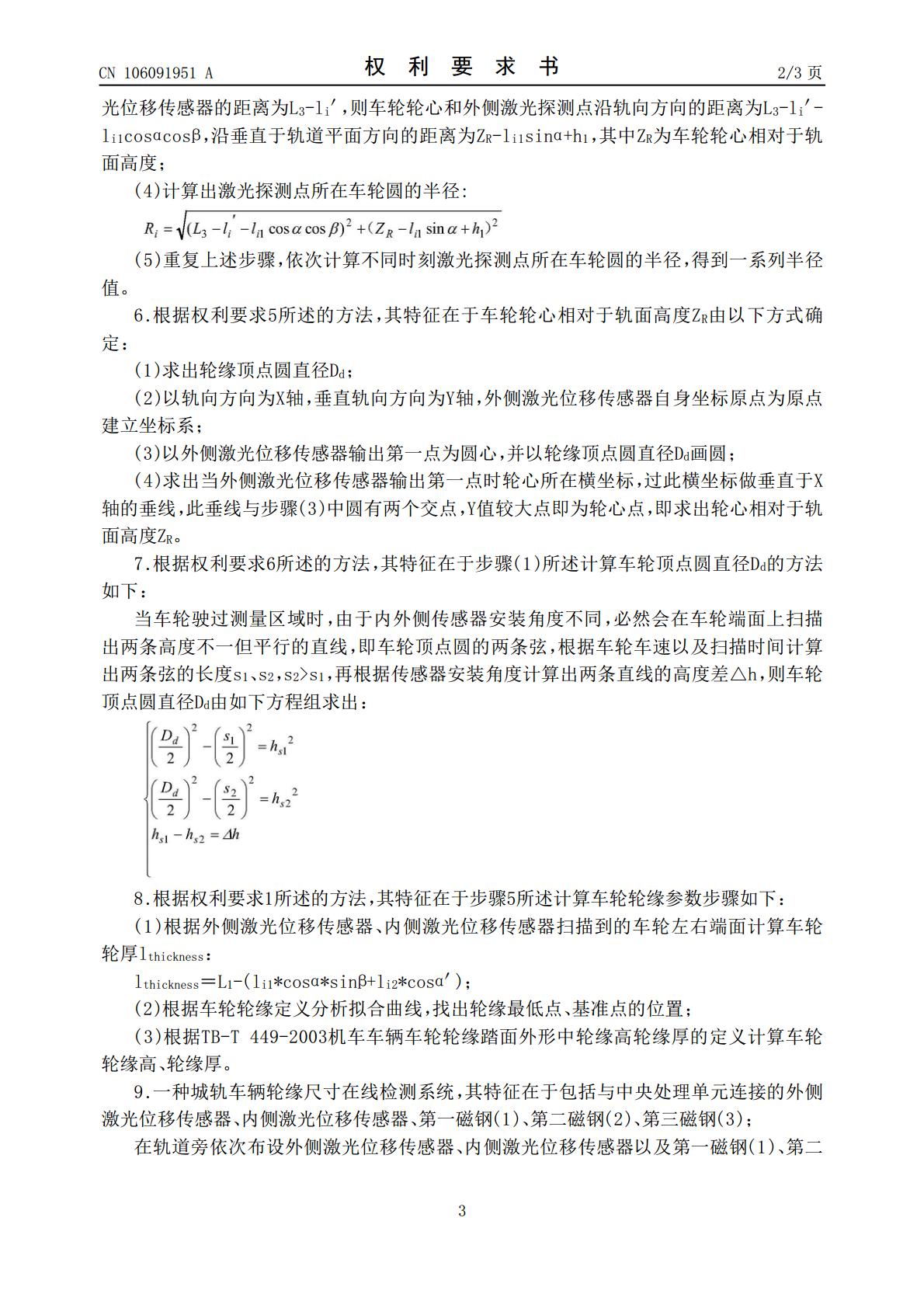
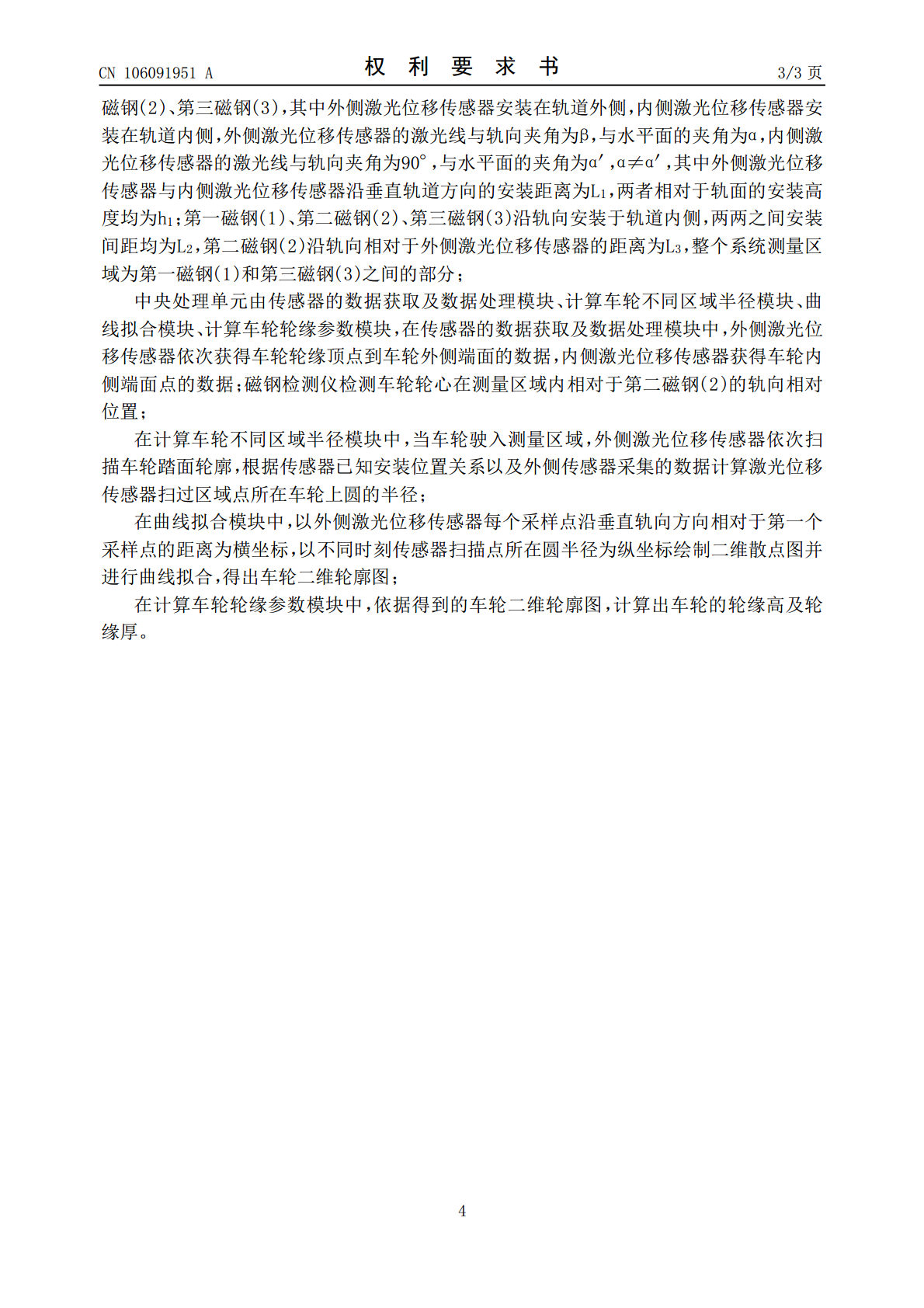
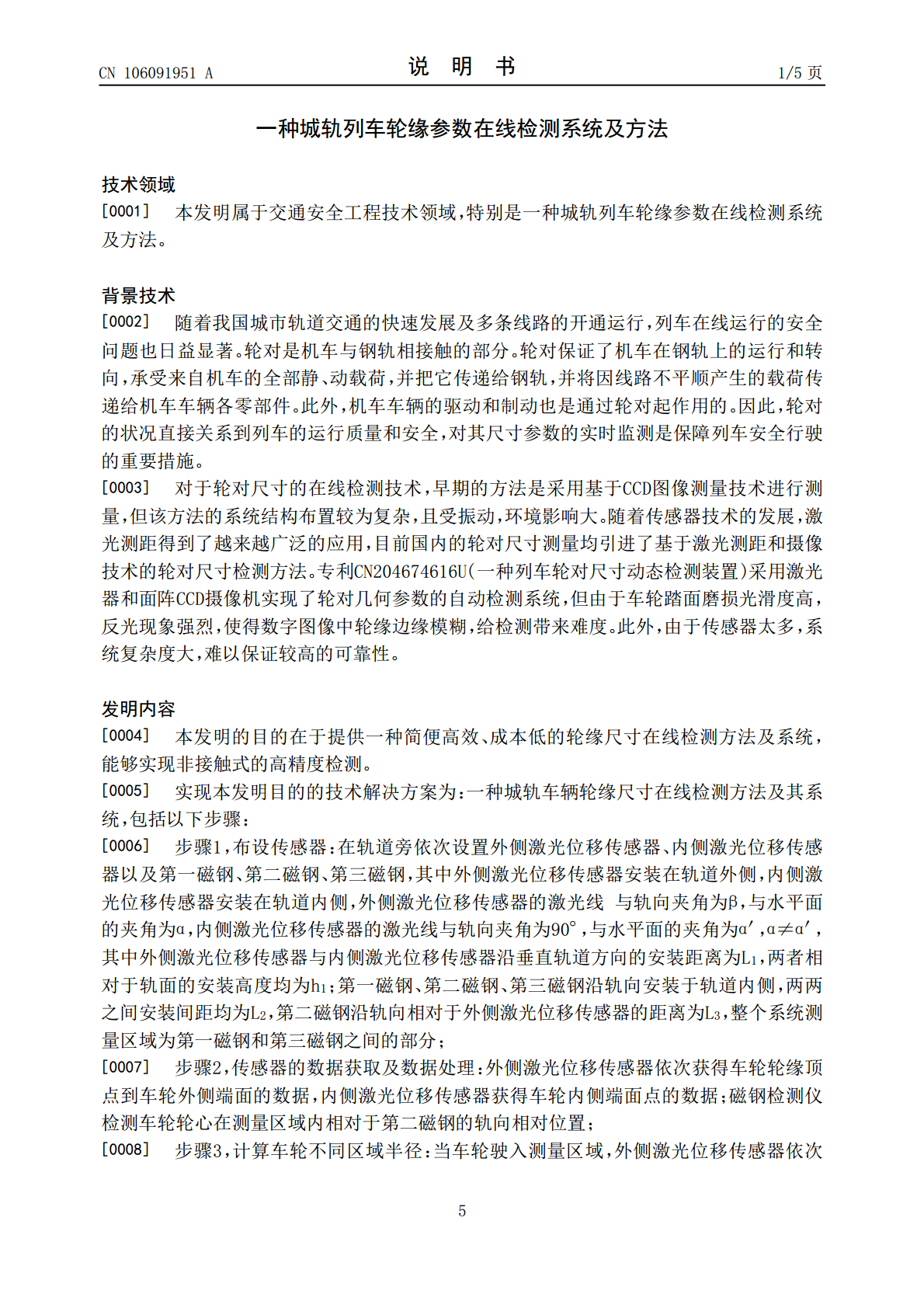
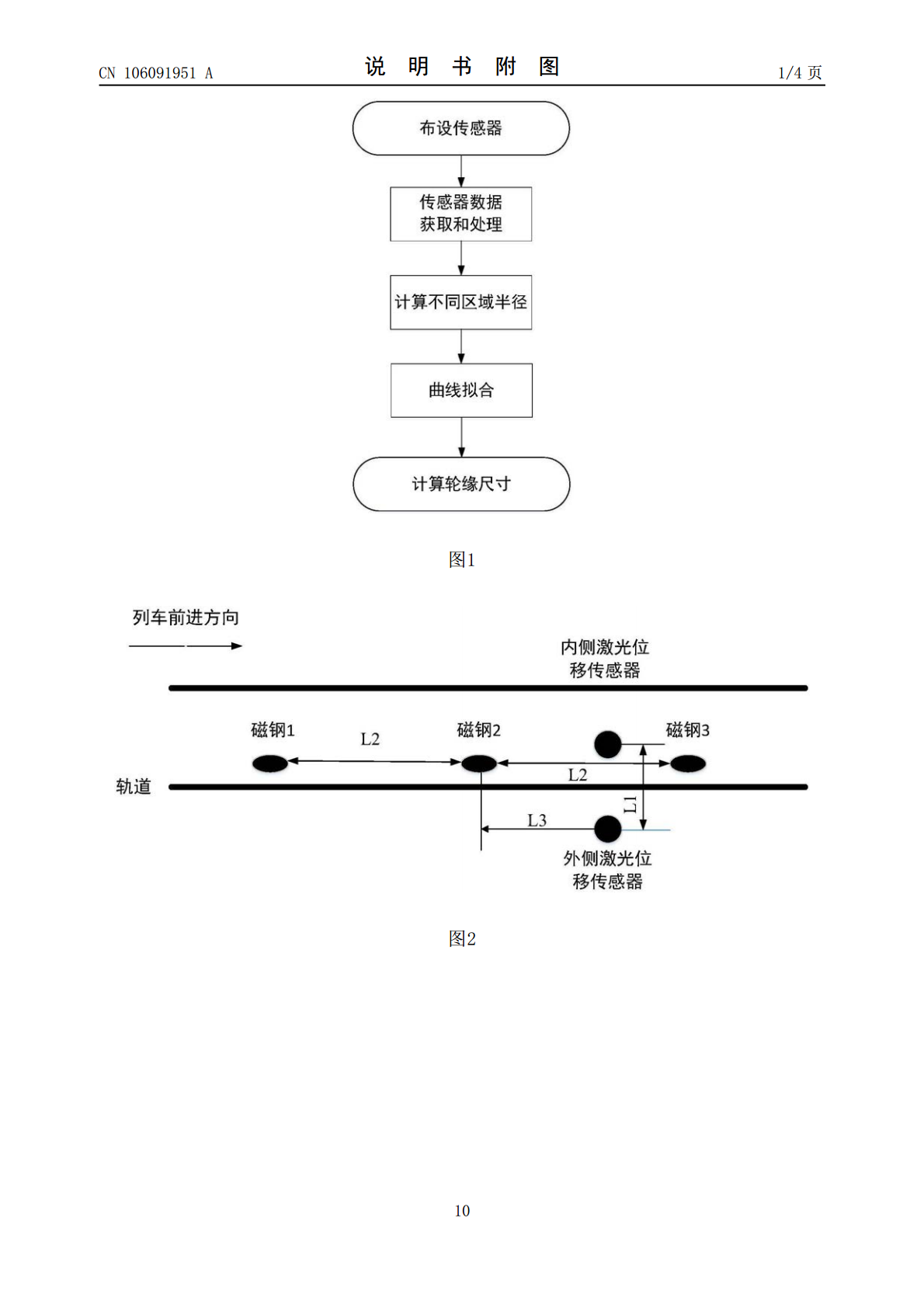
本发明公开了一种城轨车辆轮缘尺寸在线检测方法及其系统,首先进行布设传感器,传感器的数据获取及数据处理,计算车轮不同区域半径,然后进行曲线拟合,依据得到的车轮二维轮廓图,计算出车轮的轮缘高及轮缘厚。本发明成本低、原理简单且便于操作,只需要两个激光位移传感器和三个磁钢即可实现对车轮的轮缘厚、轮缘高的检测工作;具有在线非接触式测量等优点,为实现轮对尺寸的在线测量提供了一种有效的解决方案。

一种城轨列车轮缘顶点圆直径在线检测方法及系统.pdf
本发明公开了一种城轨列车轮缘顶点圆直径在线检测方法及系统,包括两个车轮传感器和两对激光发射接收装置,两个车轮传感器平行于轨向间隔安装,用于启动关闭激光发射装置以及车速测量;两对激光发射接收装置分别垂直于轨向以倾斜角进行布设,且安装高度不同,车轮传感器与两个激光发射装置用电信号连接,当车轮传感器一检测到列车到达时,发送信号触发激光发射装置工作,激光发射装置发出的激光线从轨道底部斜向上投射到列车车轮并划出两条平行的弦,结合激光线遮挡时间以及获得的车速,可得列车轮缘顶点圆直径,当车轮传感器二检测到列车所有轮对经
一种城轨列车车轮轮缘顶点圆直径的检测方法及其系统.pdf
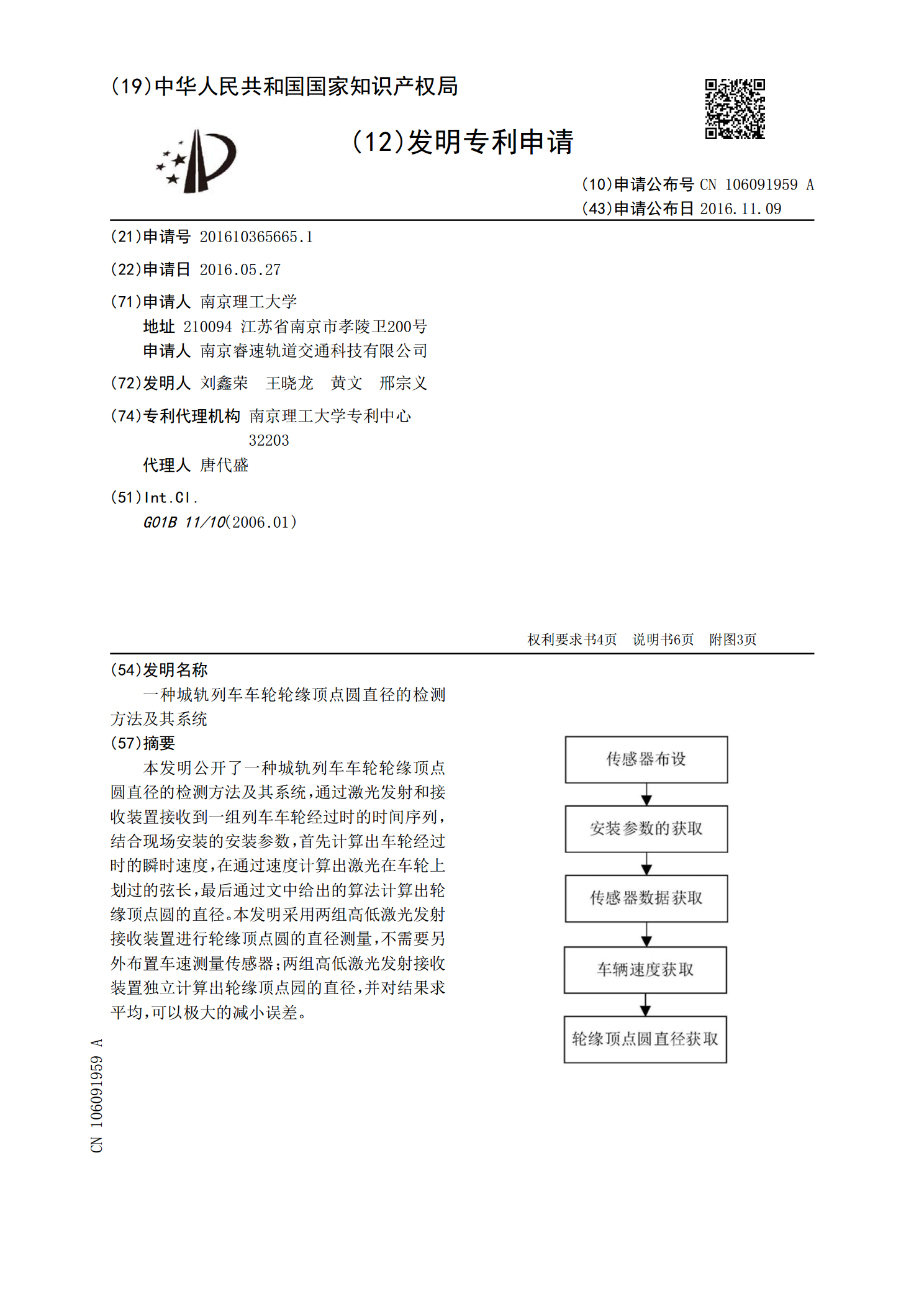
本发明公开了一种城轨列车车轮轮缘顶点圆直径的检测方法及其系统,通过激光发射和接收装置接收到一组列车车轮经过时的时间序列,结合现场安装的安装参数,首先计算出车轮经过时的瞬时速度,在通过速度计算出激光在车轮上划过的弦长,最后通过文中给出的算法计算出轮缘顶点圆的直径。本发明采用两组高低激光发射接收装置进行轮缘顶点圆的直径测量,不需要另外布置车速测量传感器;两组高低激光发射接收装置独立计算出轮缘顶点园的直径,并对结果求平均,可以极大的减小误差。
城轨车辆轮缘尺寸在线检测系统测量值的可信度确定方法.pdf
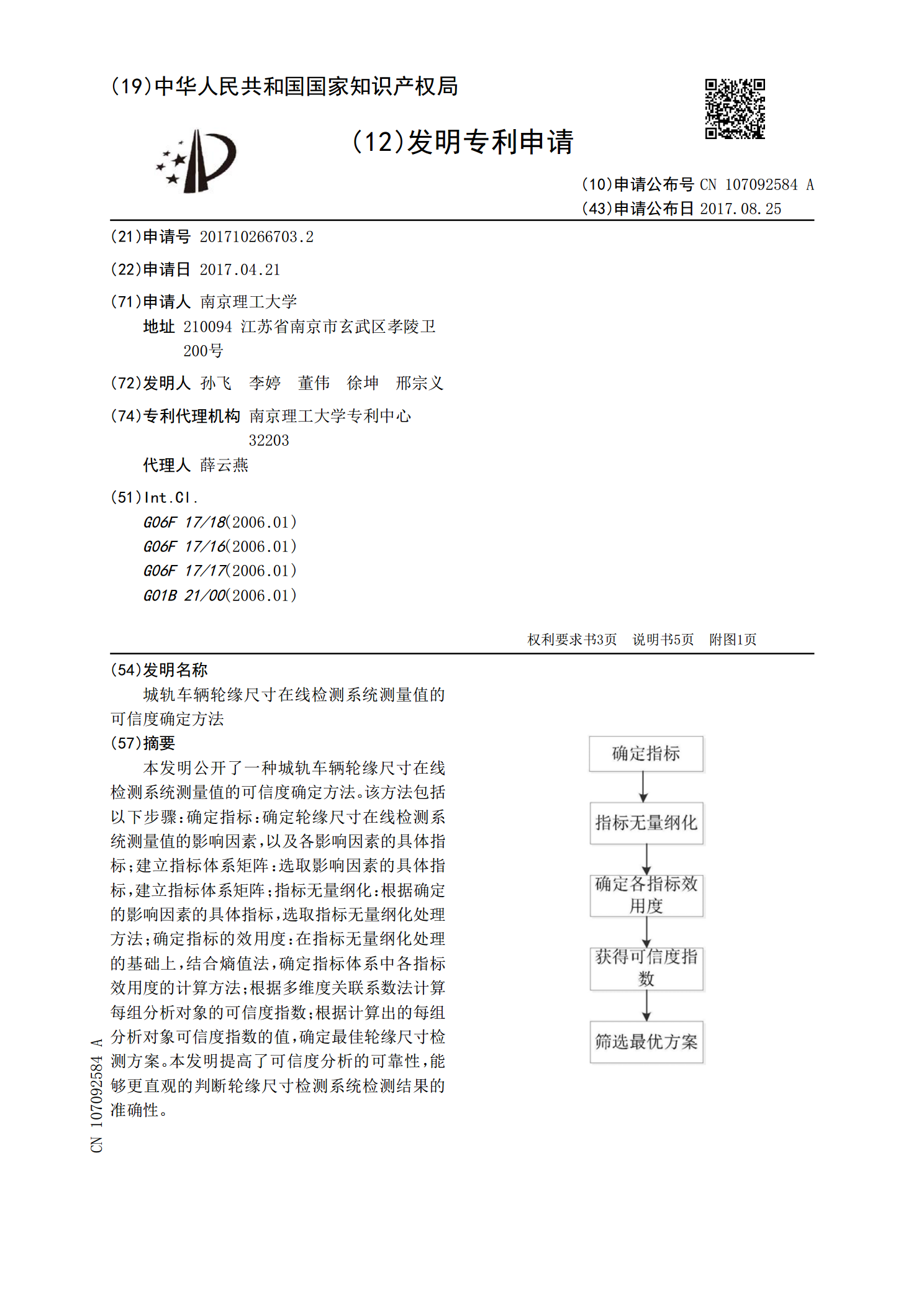
本发明公开了一种城轨车辆轮缘尺寸在线检测系统测量值的可信度确定方法。该方法包括以下步骤:确定指标:确定轮缘尺寸在线检测系统测量值的影响因素,以及各影响因素的具体指标;建立指标体系矩阵:选取影响因素的具体指标,建立指标体系矩阵;指标无量纲化:根据确定的影响因素的具体指标,选取指标无量纲化处理方法;确定指标的效用度:在指标无量纲化处理的基础上,结合熵值法,确定指标体系中各指标效用度的计算方法;根据多维度关联系数法计算每组分析对象的可信度指数;根据计算出的每组分析对象可信度指数的值,确定最佳轮缘尺寸检测方案。本

城轨列车轮缘固态润滑系统设计与应用.docx
城轨列车轮缘固态润滑系统设计与应用城轨列车轮缘固态润滑系统设计与应用摘要:城轨交通作为现代城市交通网络的重要组成部分,其安全运行和高效运营对城市交通发展至关重要。城轨列车的轮缘是保证列车正常运行的重要部件,而轮缘磨损会增加列车运行时的噪音和振动,降低运行的安全性和乘坐舒适感。因此,设计一种能够减少轮缘磨损,提高列车运行效率的固态润滑系统具有重要的研究意义和应用价值。本文将重点探讨城轨列车轮缘固态润滑系统的设计原理、材料选择与应用效果,并探讨了未来发展方向。关键词:城轨列车、轮缘、固态润滑、设计原理、材料选