
风力发电机叶尖塔筒净空的测量方法.pdf

书生****66


1/6

2/6
3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
风力发电机叶尖塔筒净空的测量方法.pdf
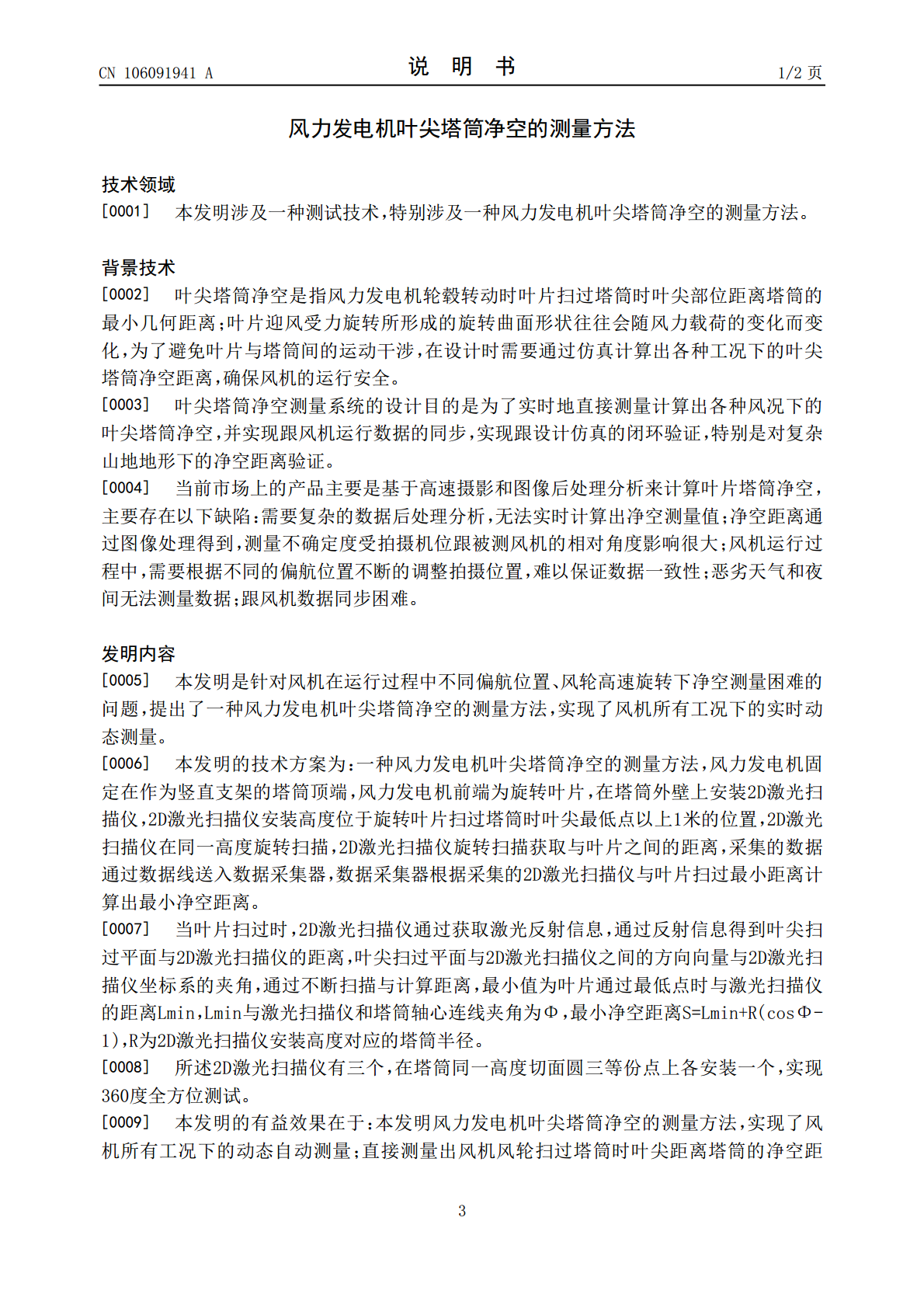
本发明涉及一种风力发电机叶尖塔筒净空的测量方法,在塔筒外壁上安装2D激光扫描仪,高度位于叶片扫过塔筒时叶尖最低点往上1米的位置。2D激光扫描仪旋转扫描获取与叶片之间的距离及角度,采集的数据通过数据线送入数据采集器,数据采集器根据采集的2D激光扫描仪与叶片距离以及激光扫描仪扫描方位角计算出叶片和塔筒间的净空距离,实现在风机所有运行工况下风轮扫过塔筒时叶尖距离塔筒净空距离的实时动态测量,并跟风机运行数据进行同步存储,进行实时的数据后处理。该测量方法中系统应用方便,可以满足在各种复杂地形下风机上的安装,并在风机
风力发电机组的塔筒、风力发电机组及塔筒构建方法.pdf
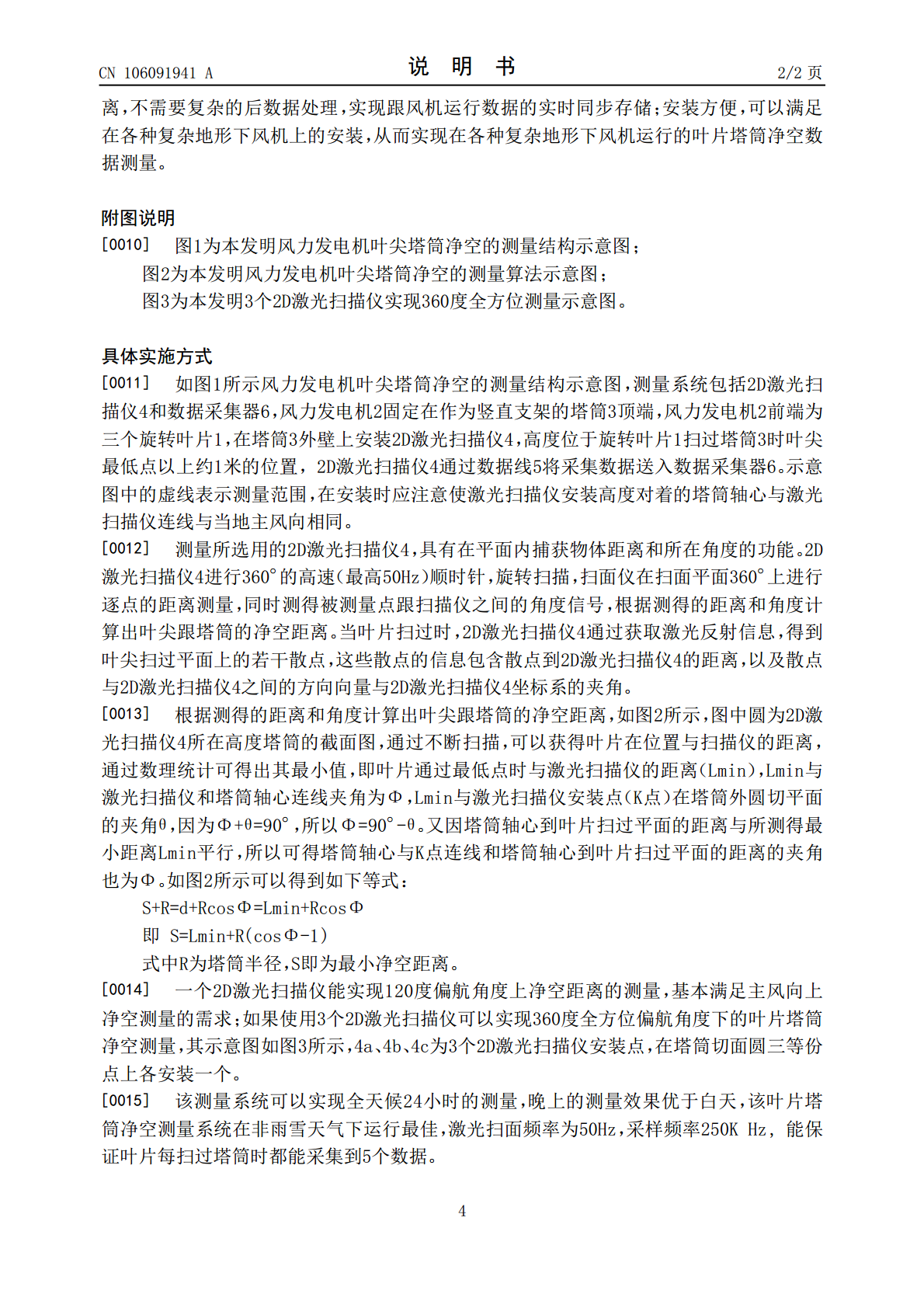
本发明提供一种风力发电机组的塔筒、风力发电机组及塔筒构建方法。该塔筒包括多个塔筒分片,各塔筒分片的内壁的两侧均设置有多个凸缘,相邻两个塔筒分片上的两个凸缘相配合,将相邻两个塔筒分片固定连接。本发明提供的风力发电机组的塔筒,通过将塔筒分成多片制造,解决了大直径塔筒制造及运输受限的问题,从而可实现针对大直径塔筒的优化设计,能有效提高轮毂中心高并降低塔筒重量,而且该塔筒连接结构简单合理,安装方便,减轻了施工现场的劳动强度。同时,采用凸缘的连接方式,使得塔筒分片上不用开孔,一定程度上提高了塔筒的整体结构强度。

车载永磁风力风筒发电机.pdf
一种车载永磁风力风筒发电机,其特征是六边形风筒(1)内底座(22上分别固定安装有电动机(6)、动力转换轴(3)、永磁发电机(2),永磁发电机(2)轴上固定安装有永磁发电机风扇(21)和永磁发电机皮带轮(16),与电动机(6)之间用皮带(20)传动连接,动力转换轴(3)与永磁发电机皮带轮(16)之间用皮带(18)传动连接,电动机(6)与动力转换轴(3)之间用皮带(19)传动连接,六边形风筒后挡板(4)中央有圆形风筒口(7)与圆柱形风筒(11)通风口相通连接,圆柱形风筒(11)内固定安装有1至10个圆柱形风筒
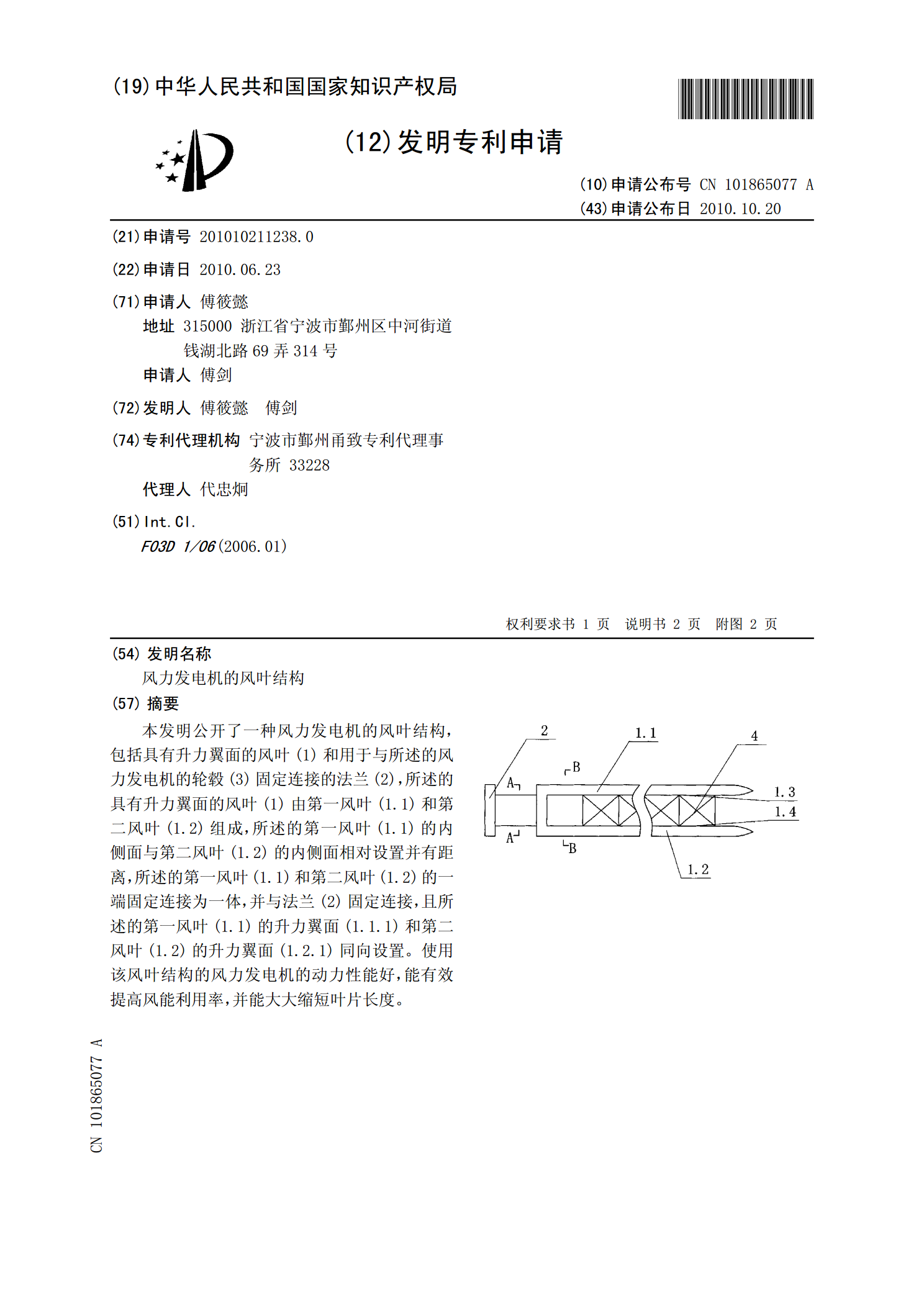
风力发电机的风叶结构.pdf
本发明公开了一种风力发电机的风叶结构,包括具有升力翼面的风叶(1)和用于与所述的风力发电机的轮毂(3)固定连接的法兰(2),所述的具有升力翼面的风叶(1)由第一风叶(1.1)和第二风叶(1.2)组成,所述的第一风叶(1.1)的内侧面与第二风叶(1.2)的内侧面相对设置并有距离,所述的第一风叶(1.1)和第二风叶(1.2)的一端固定连接为一体,并与法兰(2)固定连接,且所述的第一风叶(1.1)的升力翼面(1.1.1)和第二风叶(1.2)的升力翼面(1.2.1)同向设置。使用该风叶结构的风力发电机的动力性能好
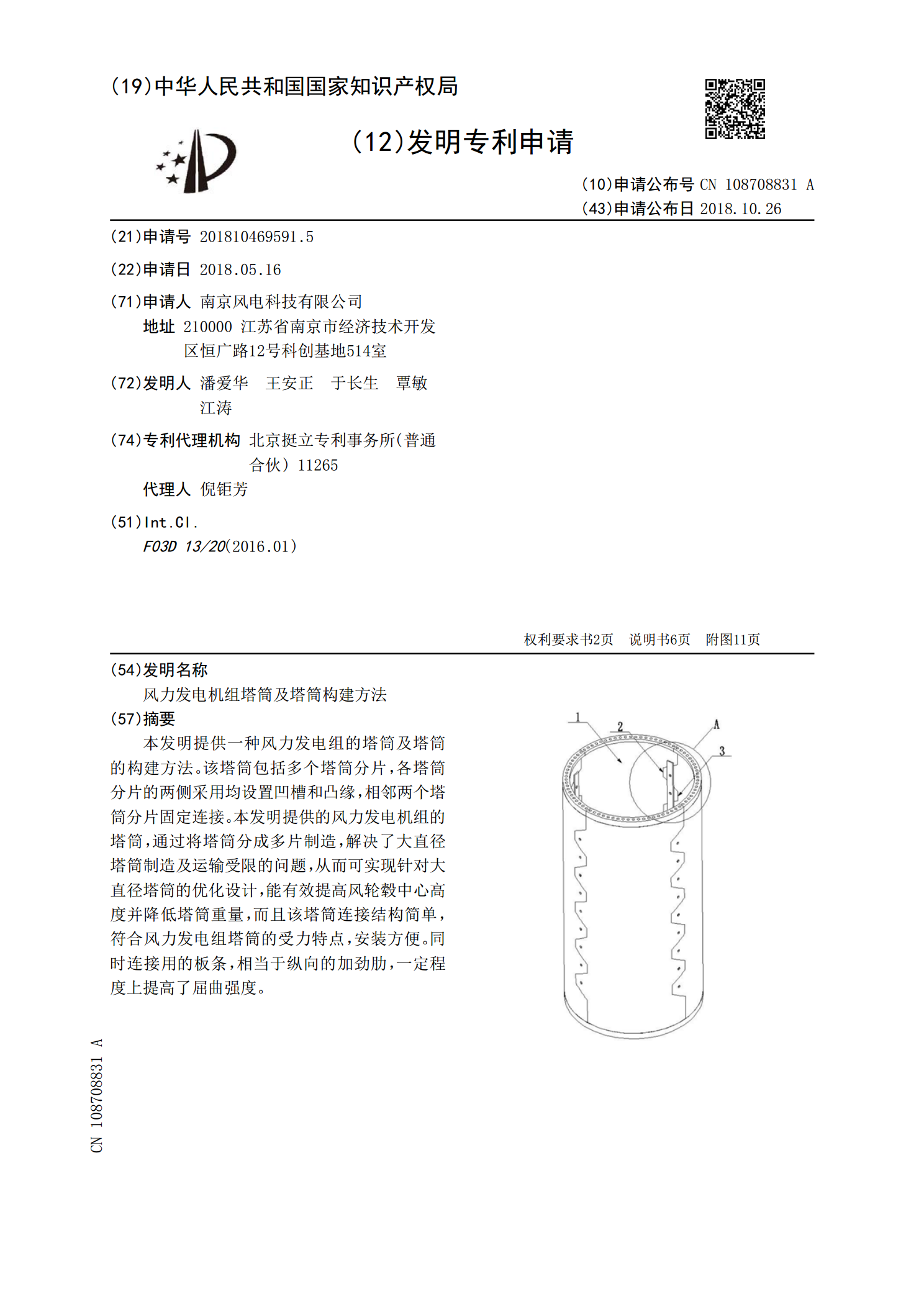
风力发电机组塔筒及塔筒构建方法.pdf
本发明提供一种风力发电组的塔筒及塔筒的构建方法。该塔筒包括多个塔筒分片,各塔筒分片的两侧采用均设置凹槽和凸缘,相邻两个塔筒分片固定连接。本发明提供的风力发电机组的塔筒,通过将塔筒分成多片制造,解决了大直径塔筒制造及运输受限的问题,从而可实现针对大直径塔筒的优化设计,能有效提高风轮毂中心高度并降低塔筒重量,而且该塔筒连接结构简单,符合风力发电组塔筒的受力特点,安装方便。同时连接用的板条,相当于纵向的加劲肋,一定程度上提高了屈曲强度。