
一种四驱轮式移动机器人轨迹跟踪控制方法.pdf

一只****爱敏

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四驱轮式移动机器人轨迹跟踪控制方法.pdf
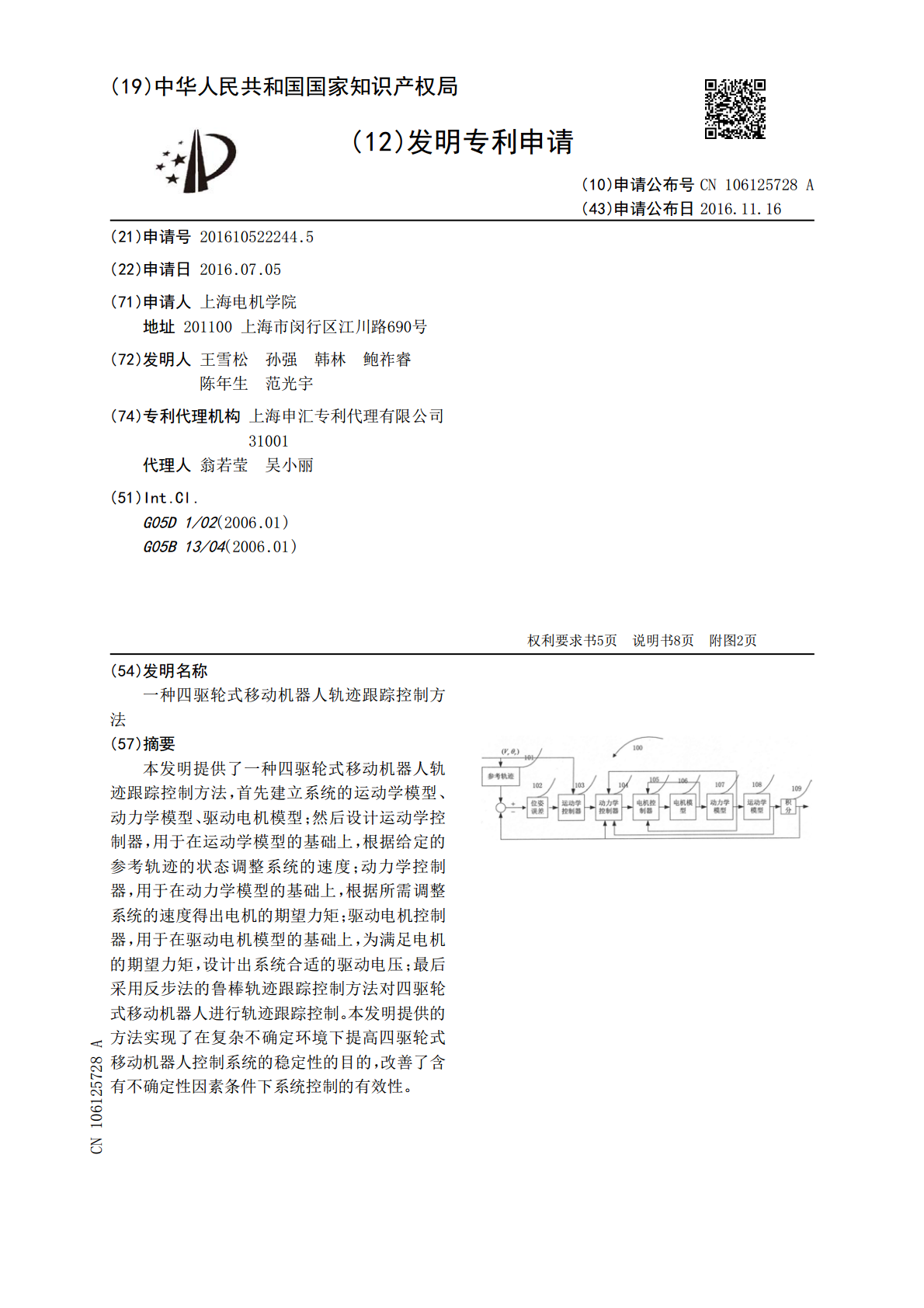
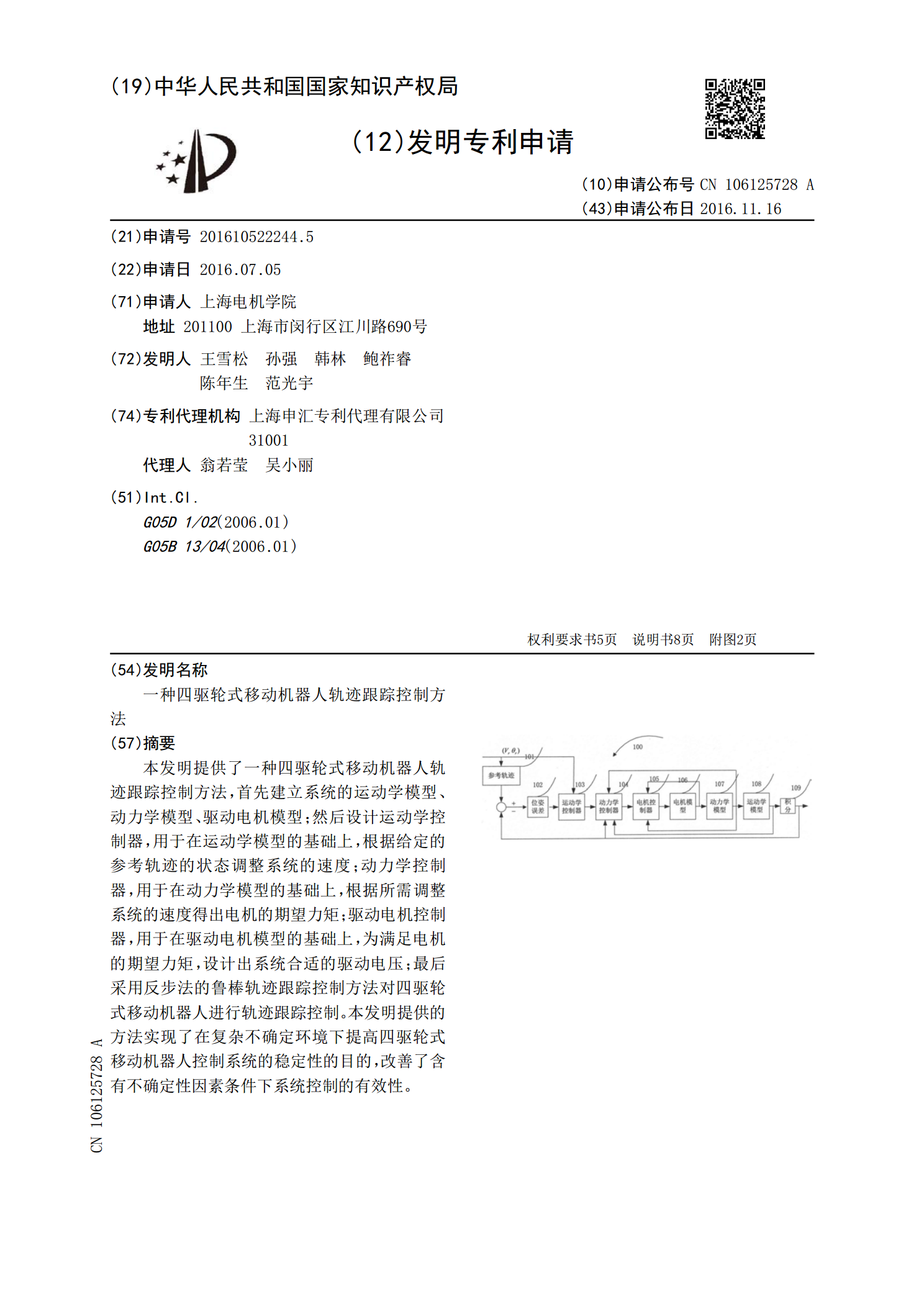
本发明提供了一种四驱轮式移动机器人轨迹跟踪控制方法,首先建立系统的运动学模型、动力学模型、驱动电机模型;然后设计运动学控制器,用于在运动学模型的基础上,根据给定的参考轨迹的状态调整系统的速度;动力学控制器,用于在动力学模型的基础上,根据所需调整系统的速度得出电机的期望力矩;驱动电机控制器,用于在驱动电机模型的基础上,为满足电机的期望力矩,设计出系统合适的驱动电压;最后采用反步法的鲁棒轨迹跟踪控制方法对四驱轮式移动机器人进行轨迹跟踪控制。本发明提供的方法实现了在复杂不确定环境下提高四驱轮式移动机器人控制系统

轮式移动机器人轨迹跟踪控制方法.docx
轮式移动机器人轨迹跟踪控制方法轮式移动机器人轨迹跟踪控制方法摘要:轮式移动机器人是一种灵活、高效的移动机器人,在许多应用领域具有重要价值。轨迹跟踪控制是轮式移动机器人的核心技术之一,它在机器人自主导航和路径规划中起着重要作用。本论文主要介绍轮式移动机器人轨迹跟踪控制的相关方法和技术,包括基于模型的控制方法、模糊控制方法和神经网络控制方法。同时,本文还将对这些方法进行比较和评估,为轮式移动机器人的轨迹跟踪控制提供参考和指导。关键词:轮式移动机器人、轨迹跟踪控制、基于模型的控制、模糊控制、神经网络控制1.引言
一种全向四驱移动机器人的轨迹跟踪方法及装置.pdf
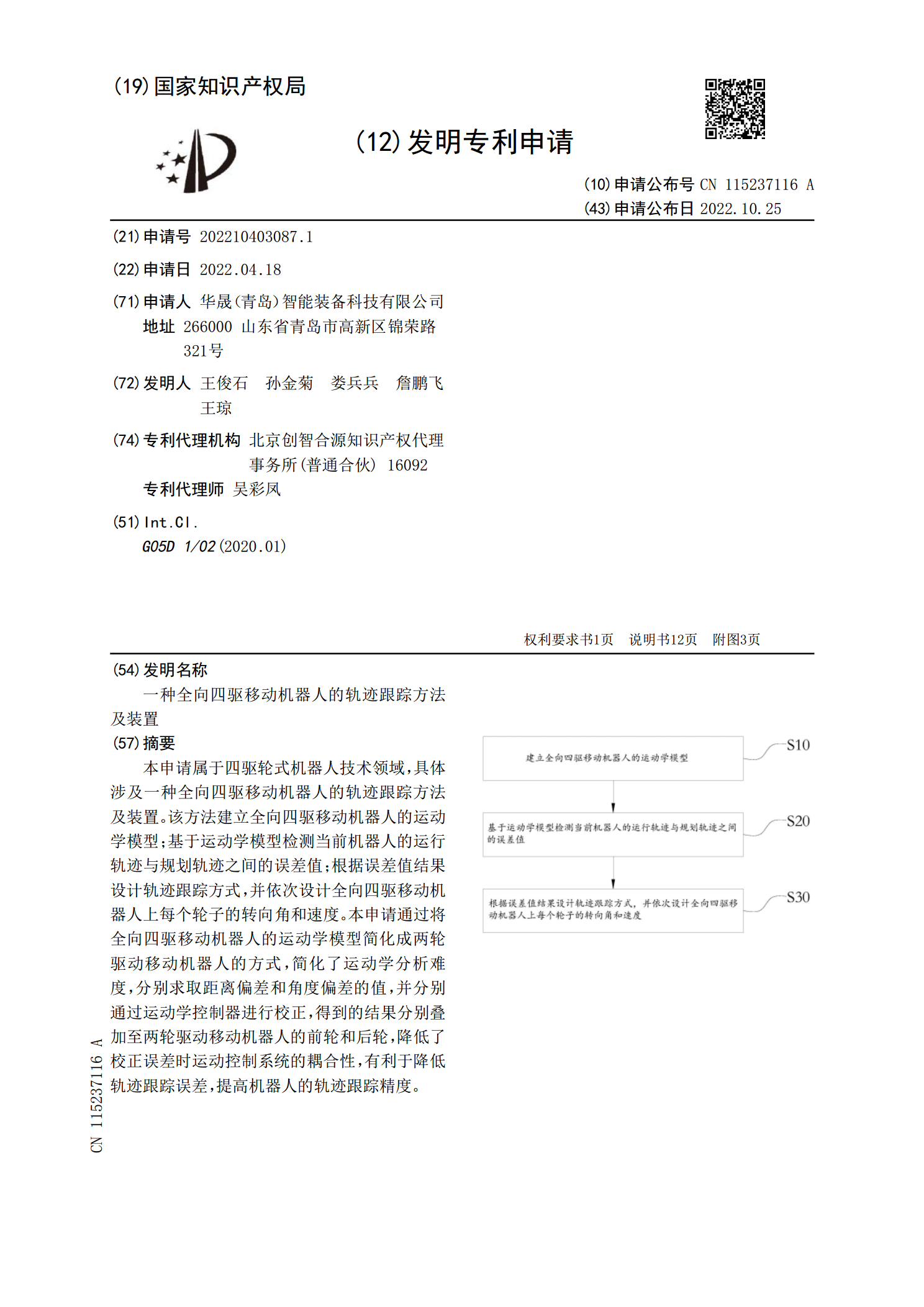
本申请属于四驱轮式机器人技术领域,具体涉及一种全向四驱移动机器人的轨迹跟踪方法及装置。该方法建立全向四驱移动机器人的运动学模型;基于运动学模型检测当前机器人的运行轨迹与规划轨迹之间的误差值;根据误差值结果设计轨迹跟踪方式,并依次设计全向四驱移动机器人上每个轮子的转向角和速度。本申请通过将全向四驱移动机器人的运动学模型简化成两轮驱动移动机器人的方式,简化了运动学分析难度,分别求取距离偏差和角度偏差的值,并分别通过运动学控制器进行校正,得到的结果分别叠加至两轮驱动移动机器人的前轮和后轮,降低了校正误差时运动控
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法.pdf
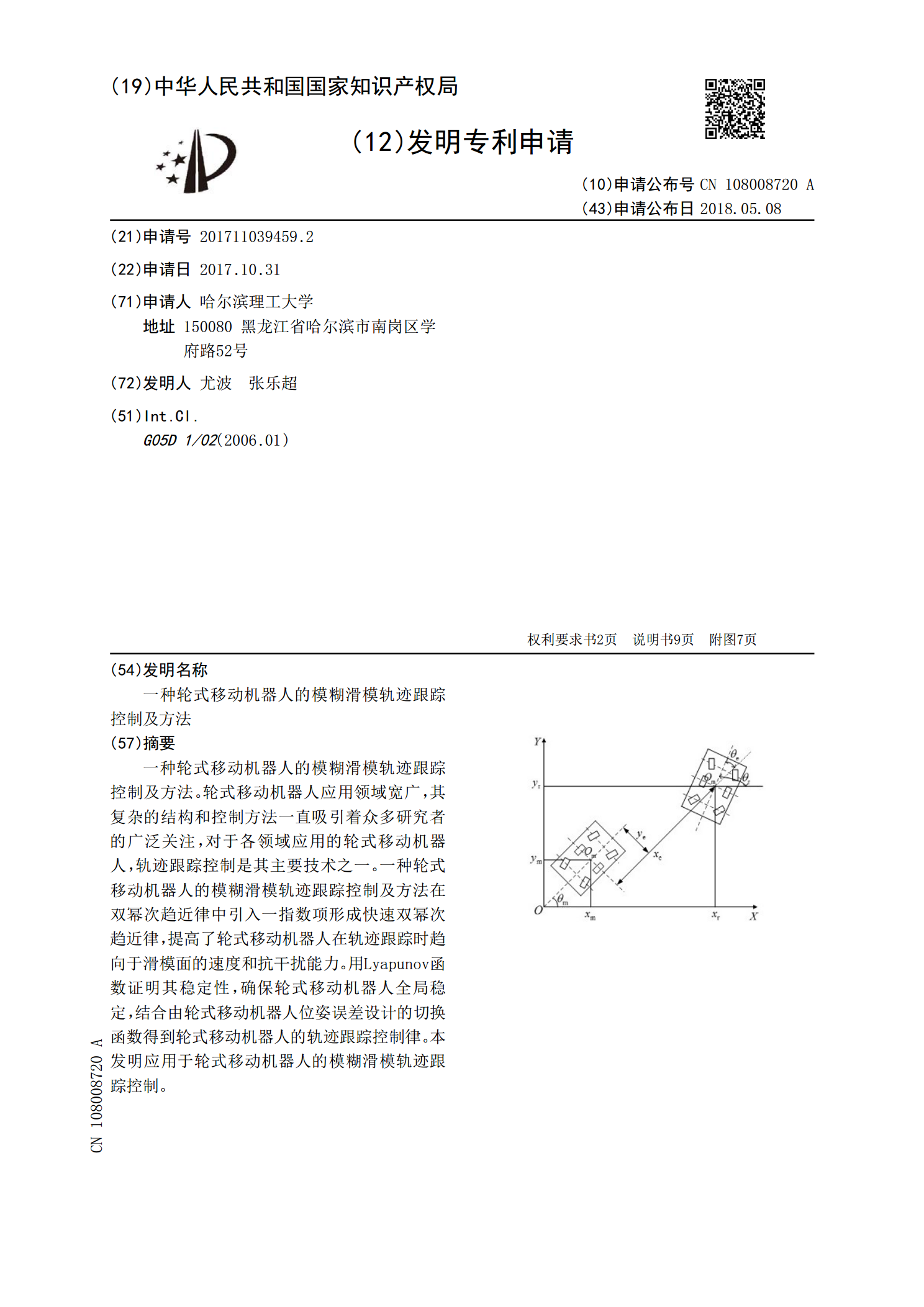
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法。轮式移动机器人应用领域宽广,其复杂的结构和控制方法一直吸引着众多研究者的广泛关注,对于各领域应用的轮式移动机器人,轨迹跟踪控制是其主要技术之一。一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法在双幂次趋近律中引入一指数项形成快速双幂次趋近律,提高了轮式移动机器人在轨迹跟踪时趋向于滑模面的速度和抗干扰能力。用Lyapunov函数证明其稳定性,确保轮式移动机器人全局稳定,结合由轮式移动机器人位姿误差设计的切换函数得到轮式移动机器人的轨迹跟踪控制律。本发明应用于轮式

一种反演滑模控制的轮式移动机器人的轨迹跟踪方法.pdf
本发明提供了一种反演滑模控制的轮式移动机器人的轨迹跟踪方法,该轨迹跟踪方法首先对轮式移动机器人进行建模,然后根据其模型建立运动学方程,在得到其目标轨迹方程后,建立其位姿误差方程,同时给出满足有界输入的约束条件,利用该约束条件设计出轮式移动机器人的反演滑模控制器,最后针对设计出来的控制器进行稳定性分析,在对控制器的输入进行有界约束后得到的控制器的控制精度,达到了对轮式移动机器人轨迹精准跟踪的目的。