
一种新型夹手.pdf

慧红****ad

1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型夹手.pdf
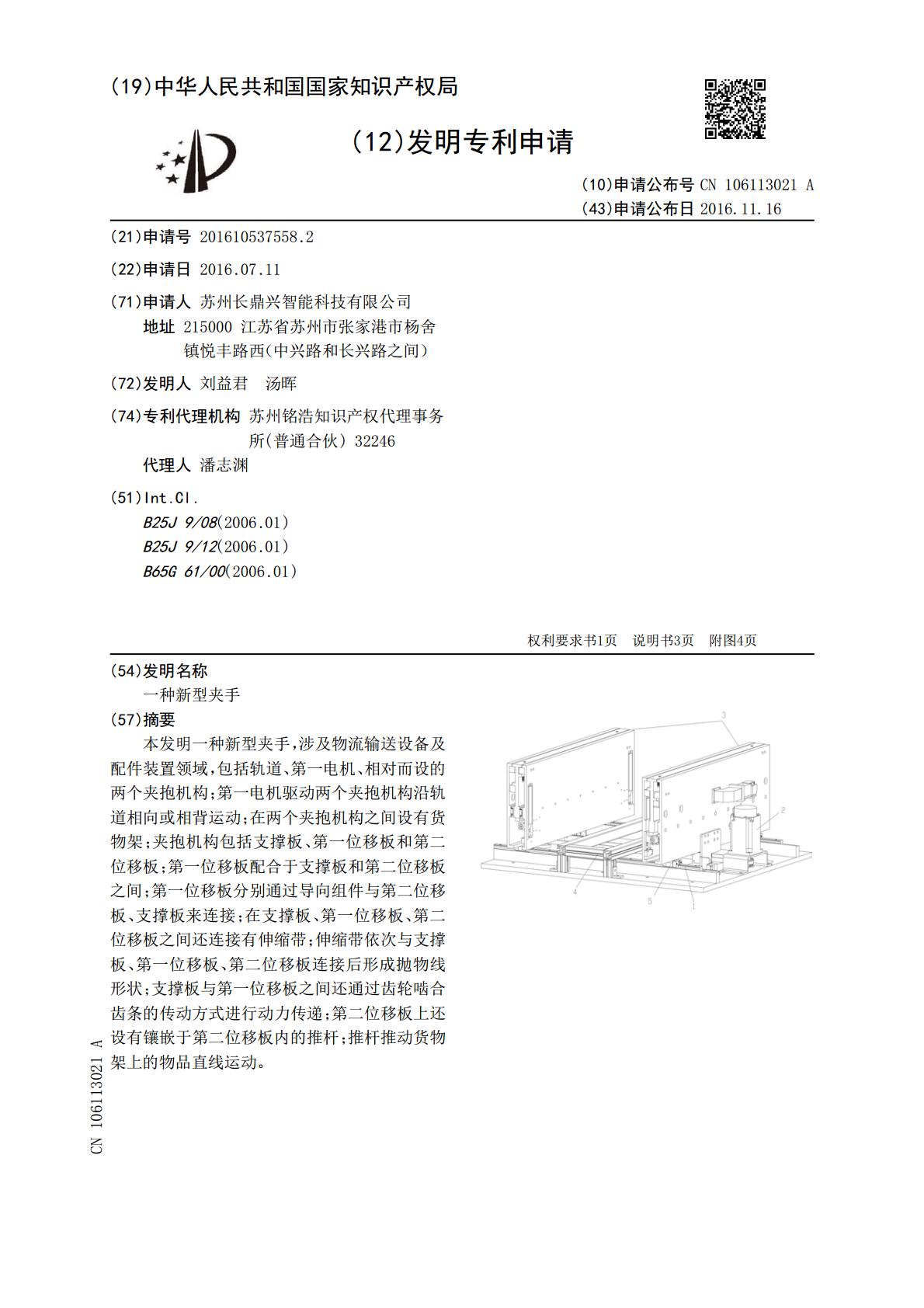
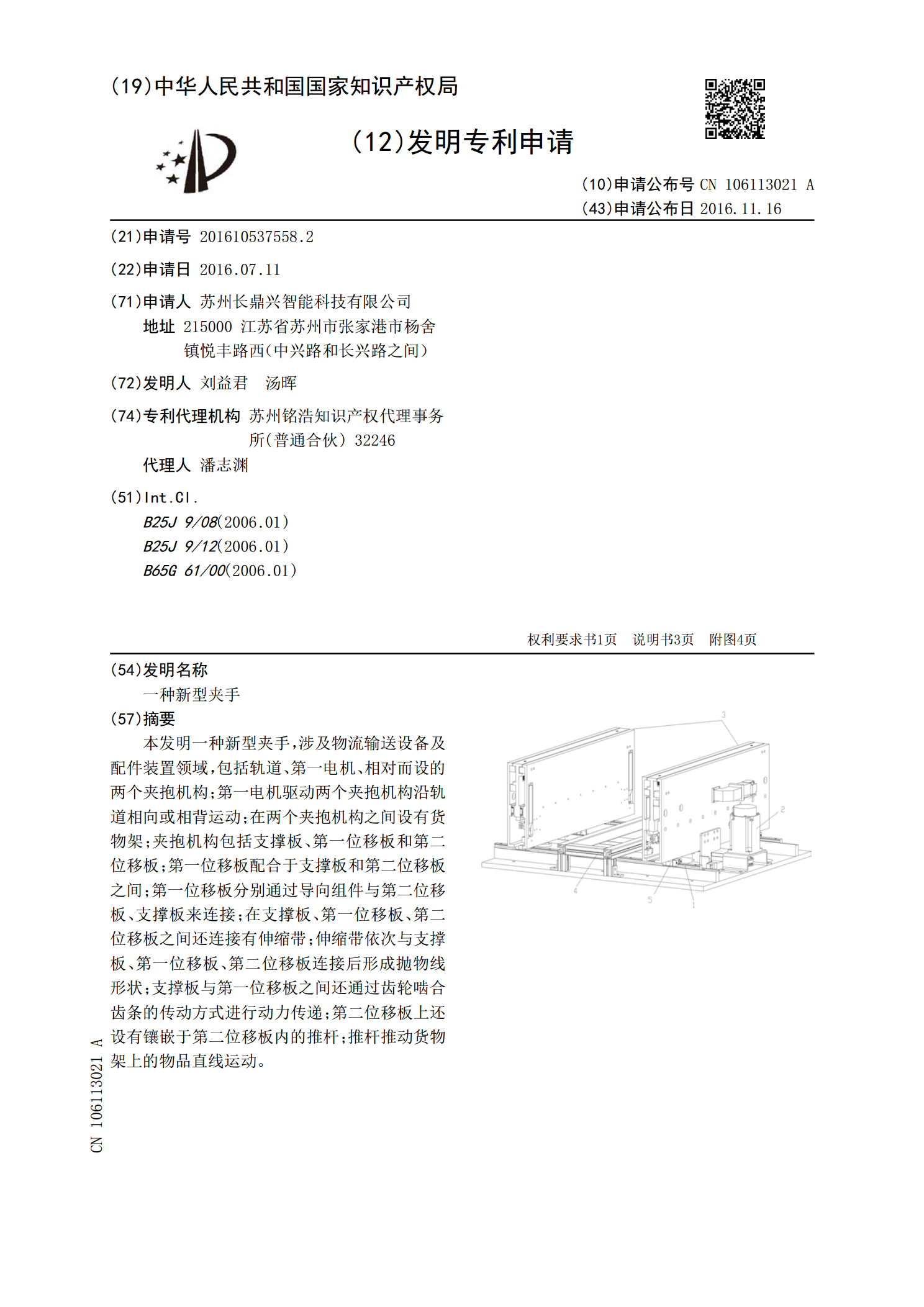
本发明一种新型夹手,涉及物流输送设备及配件装置领域,包括轨道、第一电机、相对而设的两个夹抱机构;第一电机驱动两个夹抱机构沿轨道相向或相背运动;在两个夹抱机构之间设有货物架;夹抱机构包括支撑板、第一位移板和第二位移板;第一位移板配合于支撑板和第二位移板之间;第一位移板分别通过导向组件与第二位移板、支撑板来连接;在支撑板、第一位移板、第二位移板之间还连接有伸缩带;伸缩带依次与支撑板、第一位移板、第二位移板连接后形成抛物线形状;支撑板与第一位移板之间还通过齿轮啮合齿条的传动方式进行动力传递;第二位移板上还设有镶

一种新型防夹手手闸.pdf
本发明公开了一种新型防夹手手闸,包括手刹柄、车把、手刹支杆、弹簧、滑轮、手刹线,所述的车把里侧固定有手刹支杆和滑轮,所述的手刹支杆的另一端和手刹柄连接,所述的刹车线穿过滑轮与手刹柄连接,所述的手刹柄和车把之间固定有一个弹簧,所述的手刹支杆和手刹柄之间为铆钉连接,所述的手刹支杆位于滑轮的外侧,所述的手刹柄为金属柄,总体上,本发明具有总体上,本发明具有结构简单、设计合理、防止夹手的优点。

一种新型车载滚轮自动夹手机支架.pdf
本发明公开了一种新型车载滚轮自动夹手机支架,包括机壳,机壳的底部设置有固定夹组件,机壳的中间具有无线充电组件以及齿轮传动组件,机壳的两端分别设置一夹紧装置,夹紧装置包括一臂盖以及一连臂架,臂盖的相对面均装入一滚轮硅胶环,滚轮硅胶环的两端各设置一滚轮轴,滚轮轴转动安装于臂盖上的滚轮轴孔中,连臂架与齿轮传动组件中的传动轴连接,连臂架与臂盖之间设置一个铰接结构。本发明在放手机的位置有两个滚轮,只要用力按压就可以把手机夹住,可以调控大小手机,大小力度,解决了对手机夹力的控制和夹紧程度、无线充、占用的空间减小问题。
一种轴承夹手.pdf
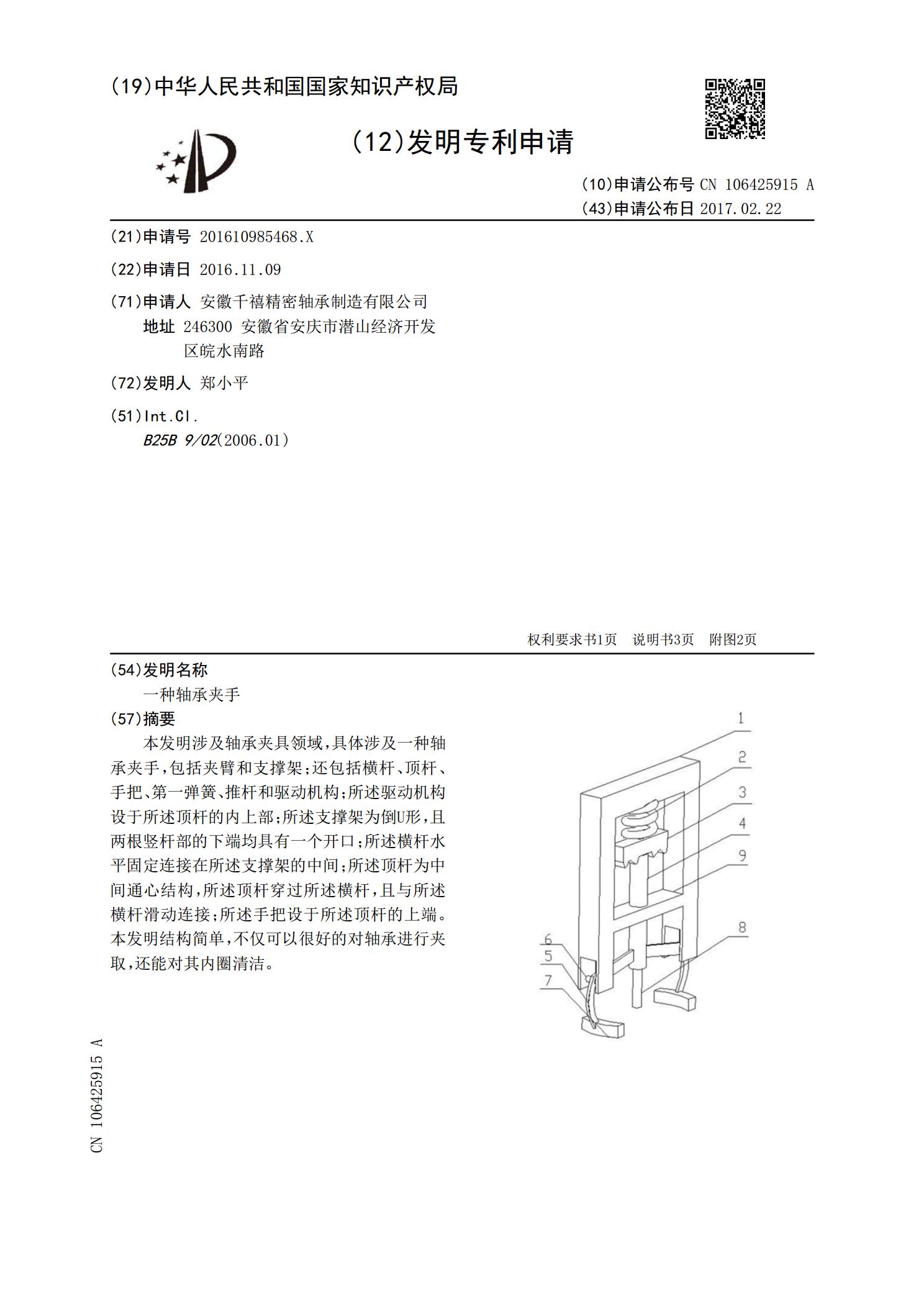
本发明涉及轴承夹具领域,具体涉及一种轴承夹手,包括夹臂和支撑架;还包括横杆、顶杆、手把、第一弹簧、推杆和驱动机构;所述驱动机构设于所述顶杆的内上部;所述支撑架为倒U形,且两根竖杆部的下端均具有一个开口;所述横杆水平固定连接在所述支撑架的中间;所述顶杆为中间通心结构,所述顶杆穿过所述横杆,且与所述横杆滑动连接;所述手把设于所述顶杆的上端。本发明结构简单,不仅可以很好的对轴承进行夹取,还能对其内圈清洁。

一种砖夹手.pdf
本申请实施例公开了一种砖夹手,包括L形的左支架、L形的右支架以及连接杆,所述左支架包括垂直设置的第一支杆以及第二支杆,所述右支架包括垂直设置的第三支杆以及第四支杆,所述连接杆的一端与所述第三支杆固定连接,所述连接杆的另一端铰接在所述第一支杆以及所述第二支杆的交界点上,所述第二支杆与所述第四支杆相对设置。本申请实施例的一种砖夹手,可方便抓取页岩砖。