
车辆导航方法和系统.pdf

邻家****曼玉


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆导航方法和系统.pdf
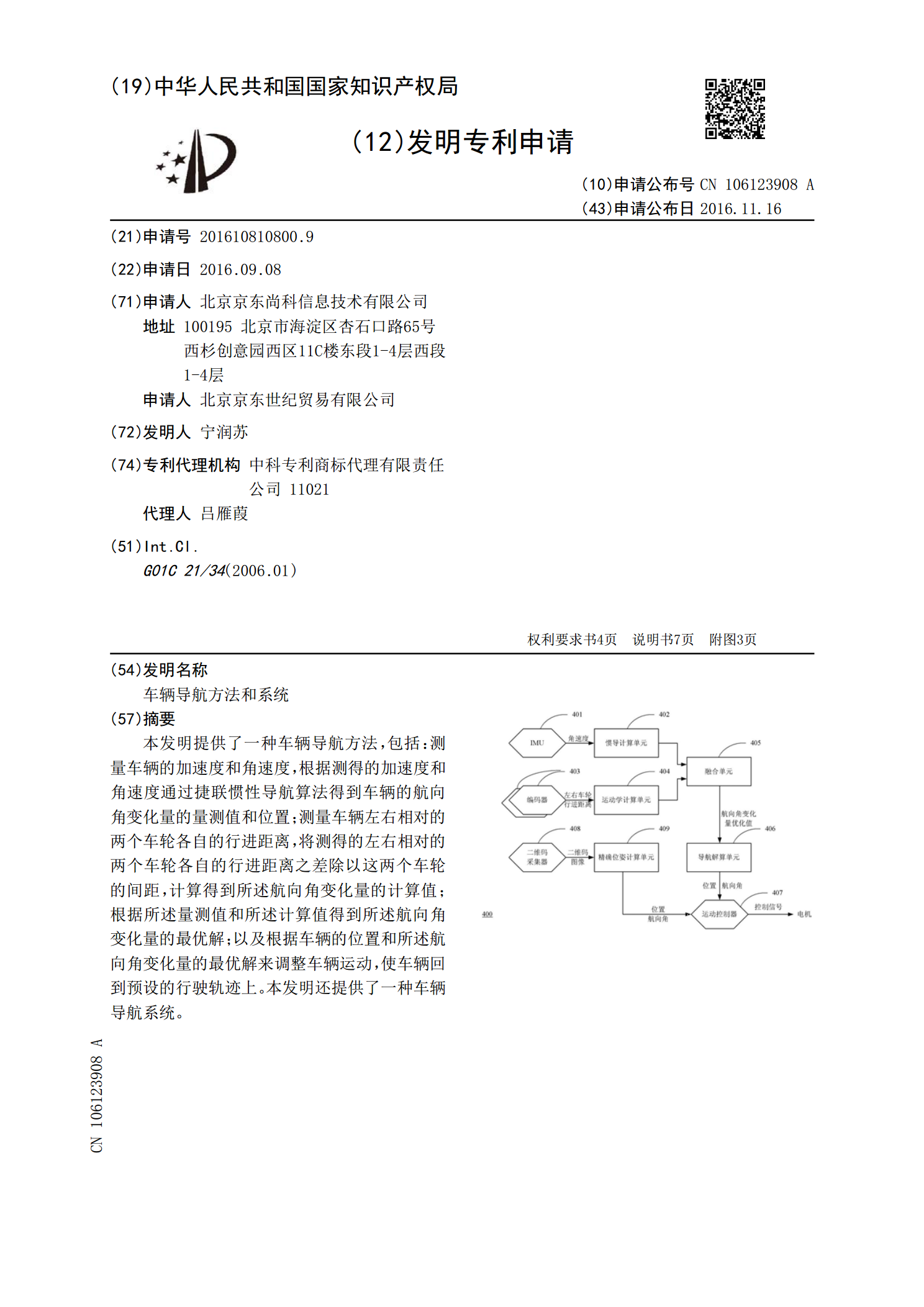
本发明提供了一种车辆导航方法,包括:测量车辆的加速度和角速度,根据测得的加速度和角速度通过捷联惯性导航算法得到车辆的航向角变化量的量测值和位置;测量车辆左右相对的两个车轮各自的行进距离,将测得的左右相对的两个车轮各自的行进距离之差除以这两个车轮的间距,计算得到所述航向角变化量的计算值;根据所述量测值和所述计算值得到所述航向角变化量的最优解;以及根据车辆的位置和所述航向角变化量的最优解来调整车辆运动,使车辆回到预设的行驶轨迹上。本发明还提供了一种车辆导航系统。

车辆定位导航系统和车辆以及车辆定位导航方法.pdf
本发明公开一种车辆定位导航系统和车辆以及车辆定位导航方法,车辆定位导航系统包括:卫星定位天线,用于接收车辆定位信息;卫星定位行驶记录仪,与卫星定位天线连接,用于响应于定位信息请求信号发送车辆定位信息;车载多媒体系统,车载多媒体系统与卫星定位行驶记录仪连接,车载多媒体系统包括导航模块,车载多媒体系统用于发送定位信息请求信号,并获取车辆定位信息,导航模块根据车辆定位信息生成导航信息并显示。本发明实施例的车辆定位导航系统,无需设置与车载多媒体系统直接连接的卫星定位天线,从而节省一根卫星定位天线,降低了成本。
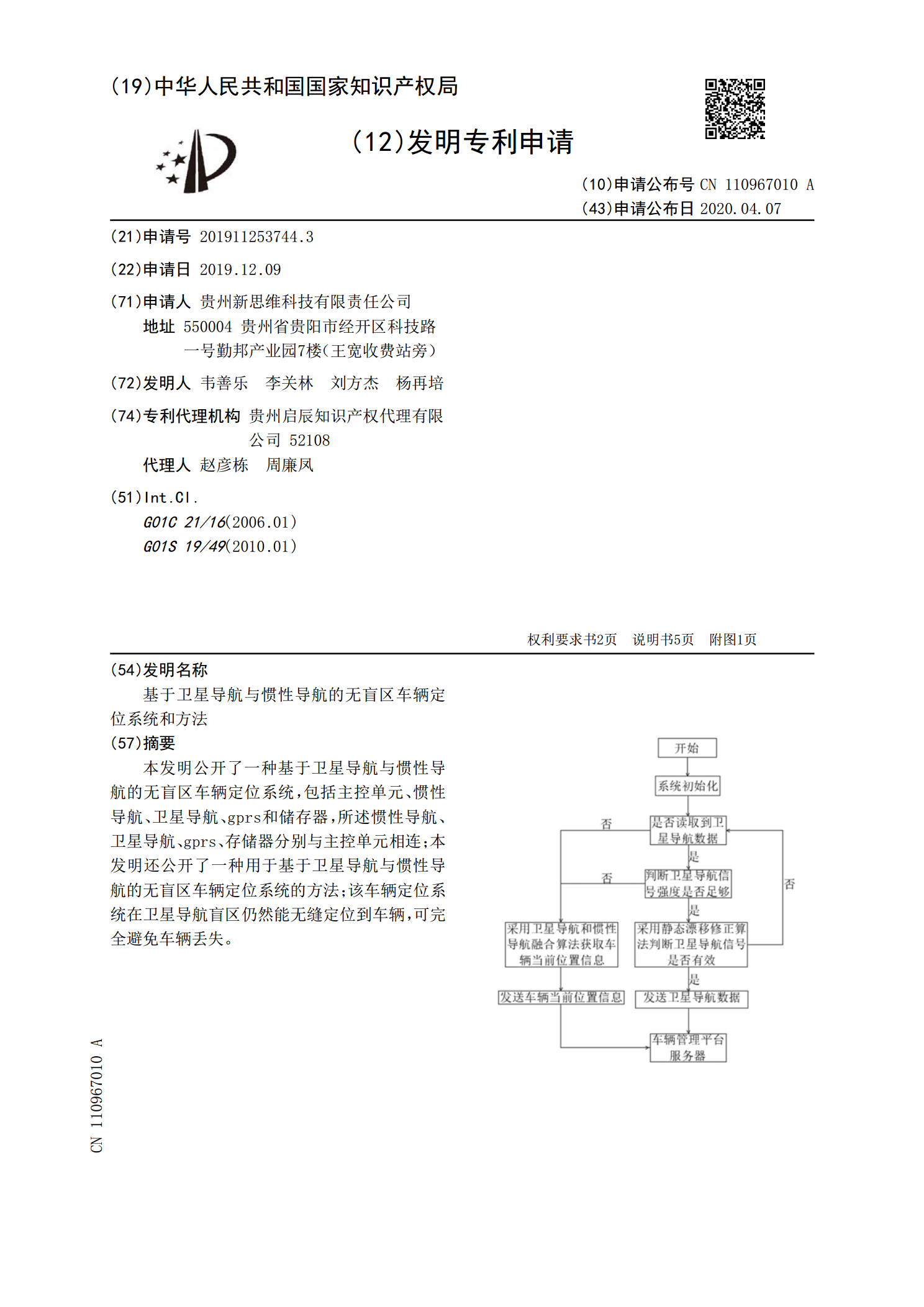
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf
本发明公开了一种基于卫星导航与惯性导航的无盲区车辆定位系统,包括主控单元、惯性导航、卫星导航、gprs和储存器,所述惯性导航、卫星导航、gprs、存储器分别与主控单元相连;本发明还公开了一种用于基于卫星导航与惯性导航的无盲区车辆定位系统的方法;该车辆定位系统在卫星导航盲区仍然能无缝定位到车辆,可完全避免车辆丢失。
车辆的导航方法、装置和车辆.pdf
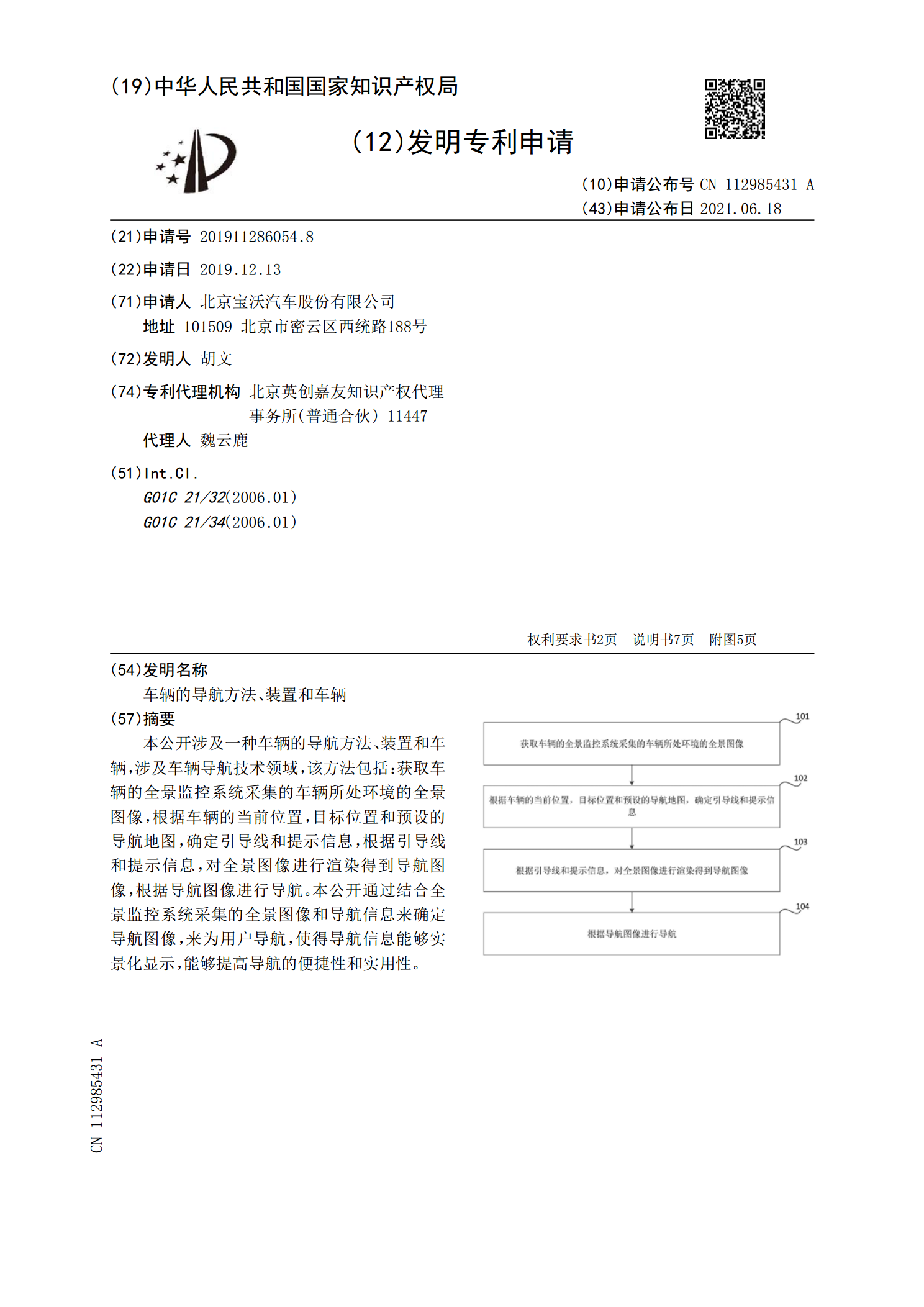
本公开涉及一种车辆的导航方法、装置和车辆,涉及车辆导航技术领域,该方法包括:获取车辆的全景监控系统采集的车辆所处环境的全景图像,根据车辆的当前位置,目标位置和预设的导航地图,确定引导线和提示信息,根据引导线和提示信息,对全景图像进行渲染得到导航图像,根据导航图像进行导航。本公开通过结合全景监控系统采集的全景图像和导航信息来确定导航图像,来为用户导航,使得导航信息能够实景化显示,能够提高导航的便捷性和实用性。

智能导航照明系统和方法及包括该系统的车辆.pdf
本发明提供一种用于车辆的智能导航照明系统(100),其包括:照明系统;道路导航监测系统,用于车辆导航并对目标行驶路线进行监测;以及控制系统,所述控制系统构造成能在道路导航监测系统检测到即将到达目标转弯路口时控制照明系统发出短焦距光来以跟踪所述目标转弯路口的取向的方式持续地照亮所述目标转弯路口。本发明还提供一种利用上述智能导航照明系统(100)进行智能导航照明的方法以及包括该智能导航照明系统(100)的车辆。