
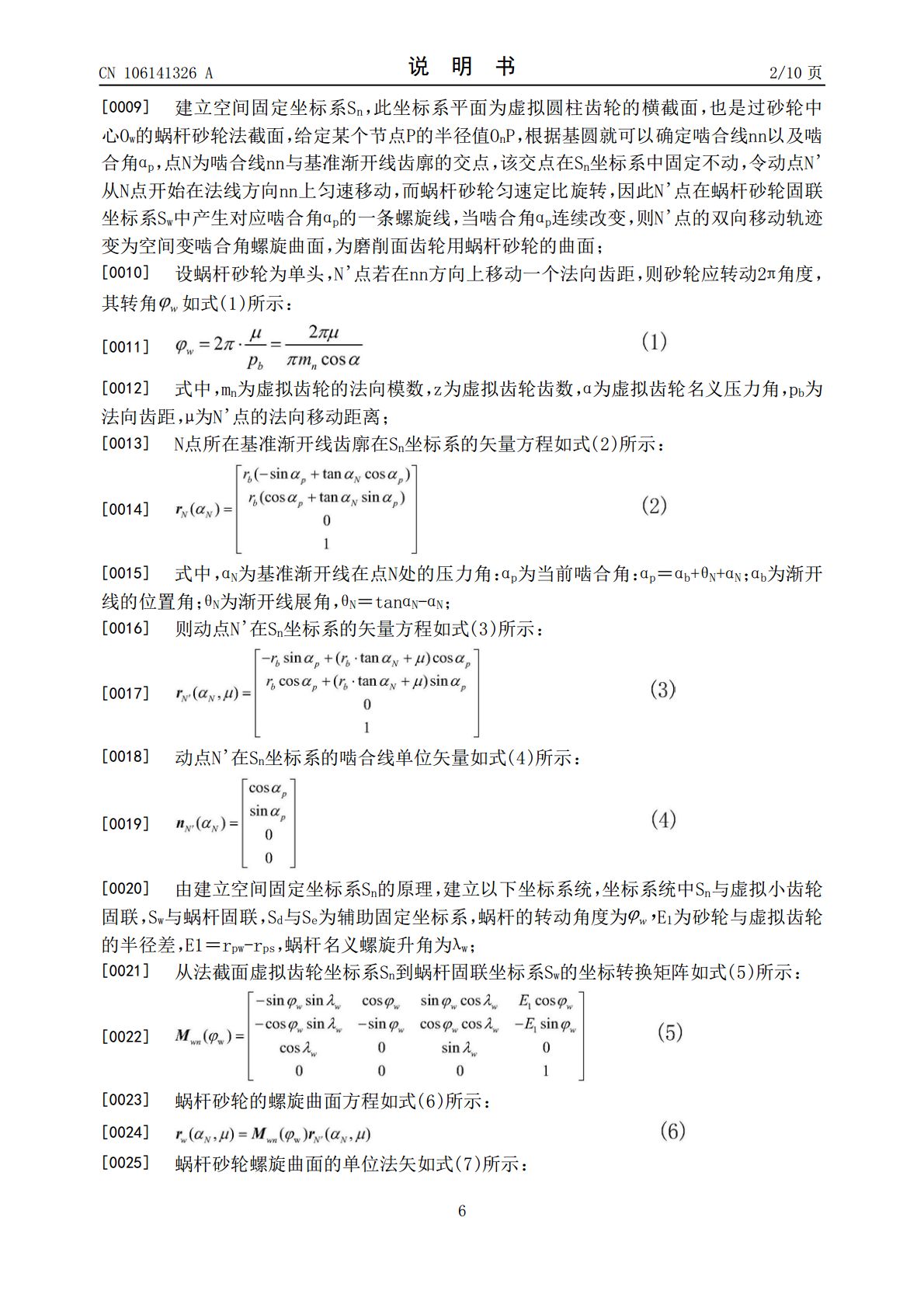
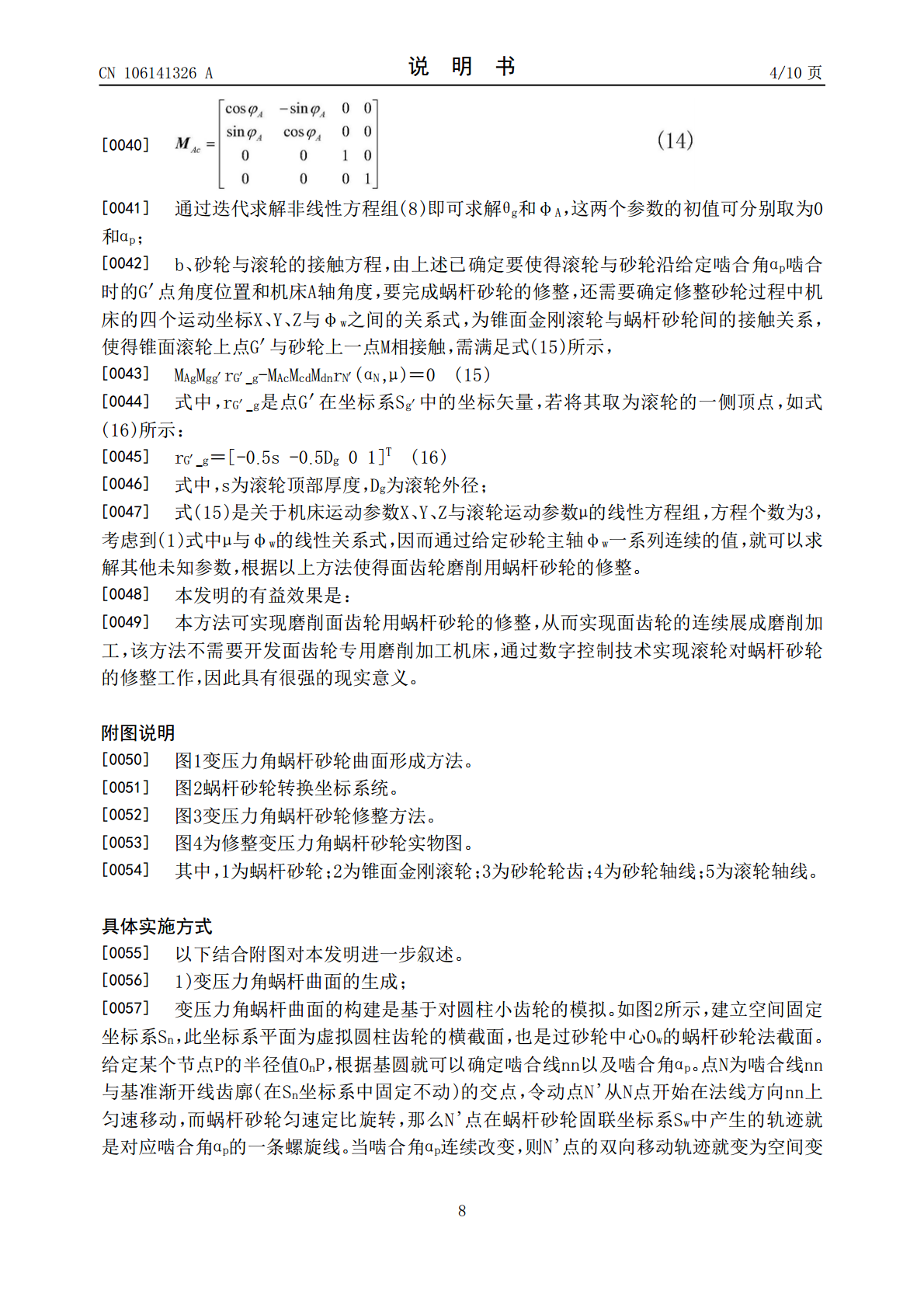
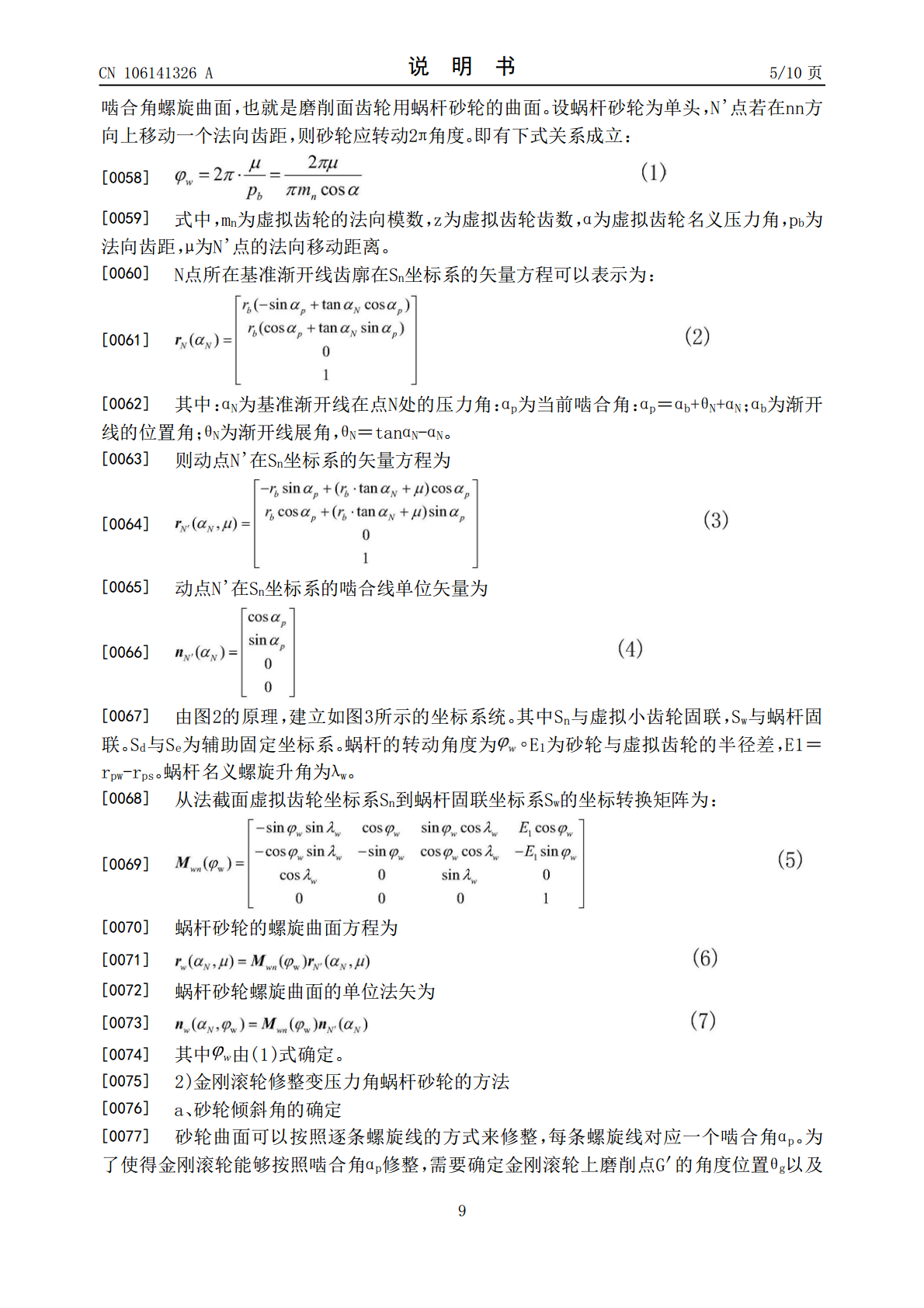
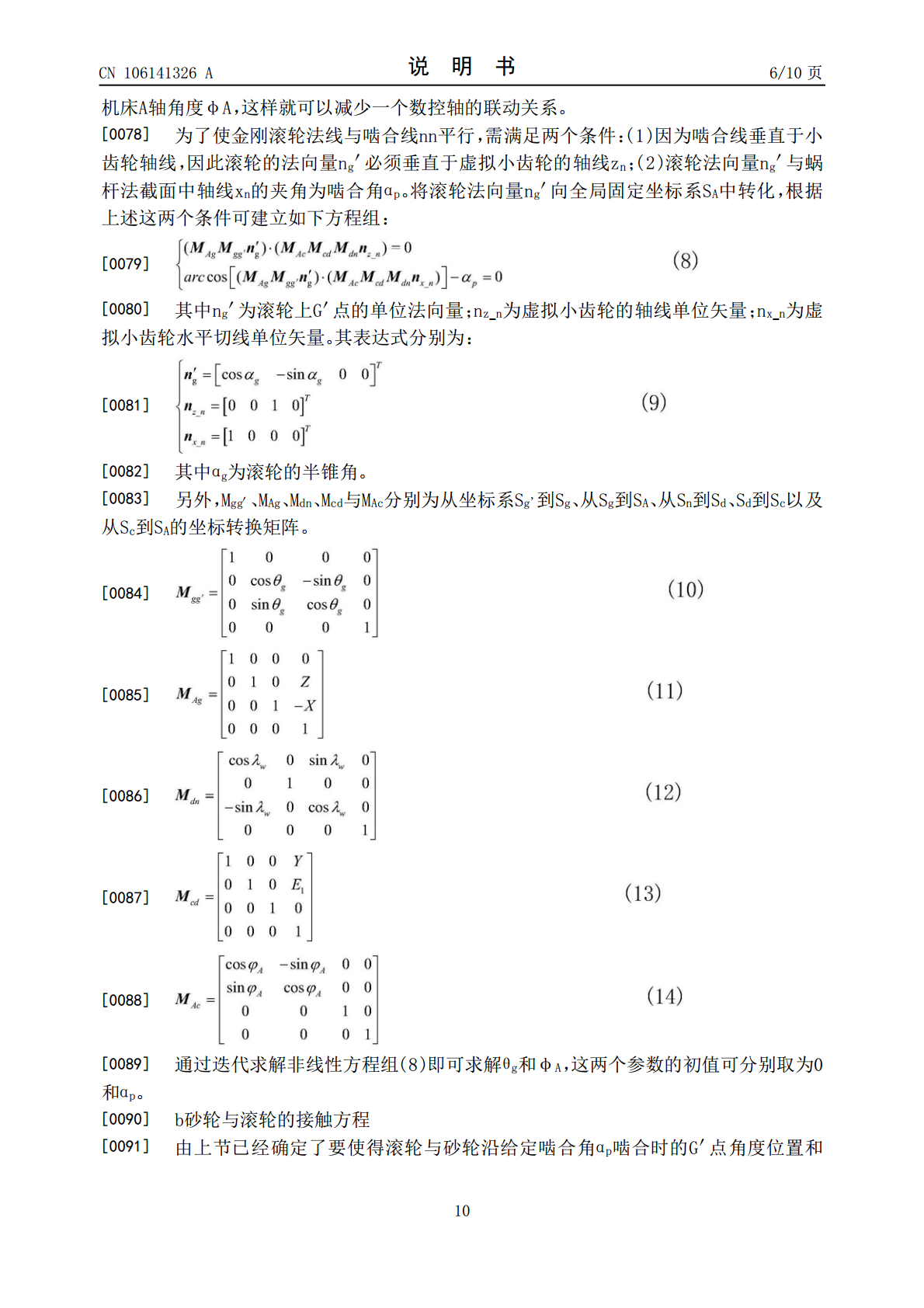
一种面齿轮磨削用蜗杆砂轮的修整方法.pdf

一吃****成益

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面齿轮磨削用蜗杆砂轮的修整方法.pdf
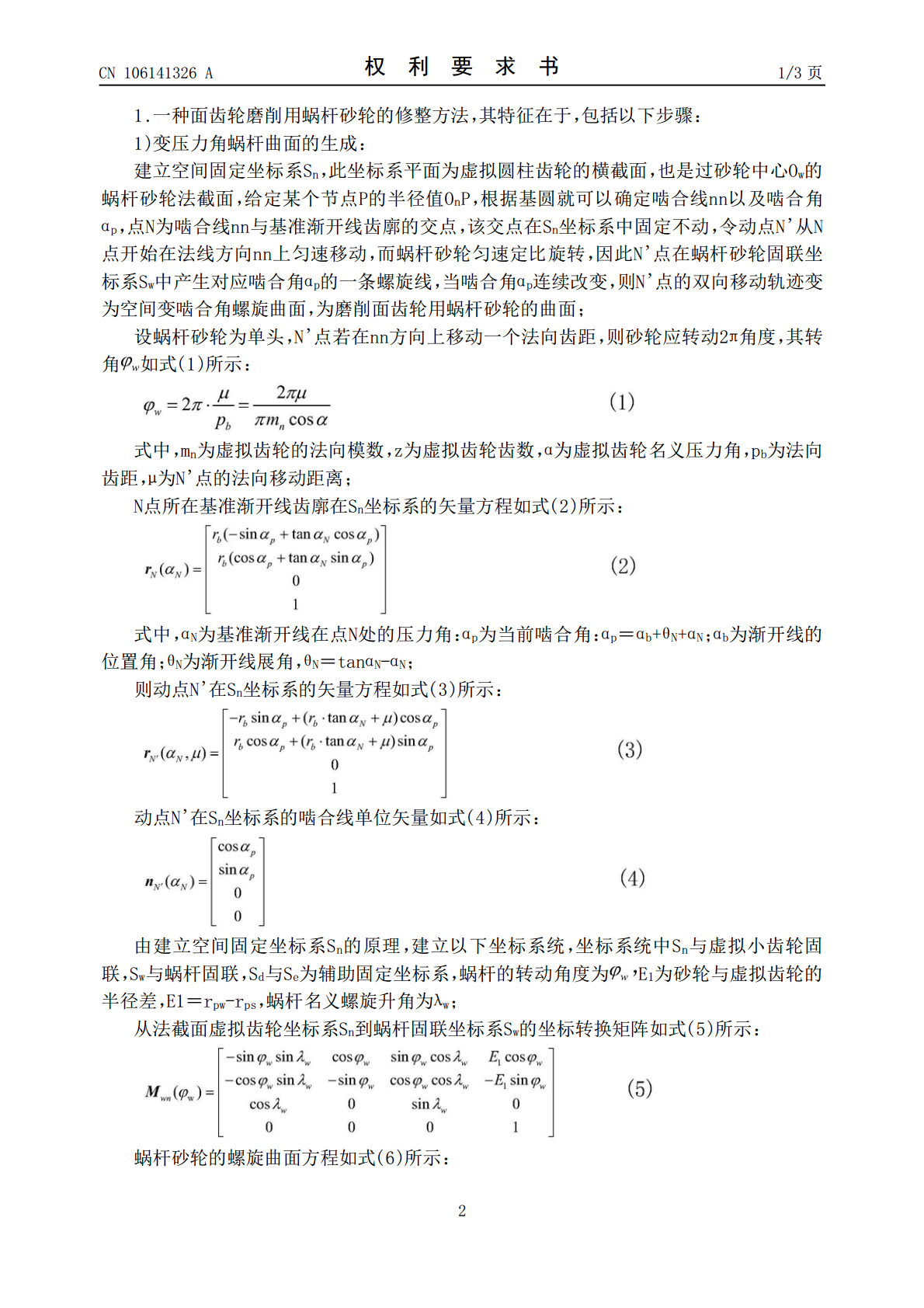
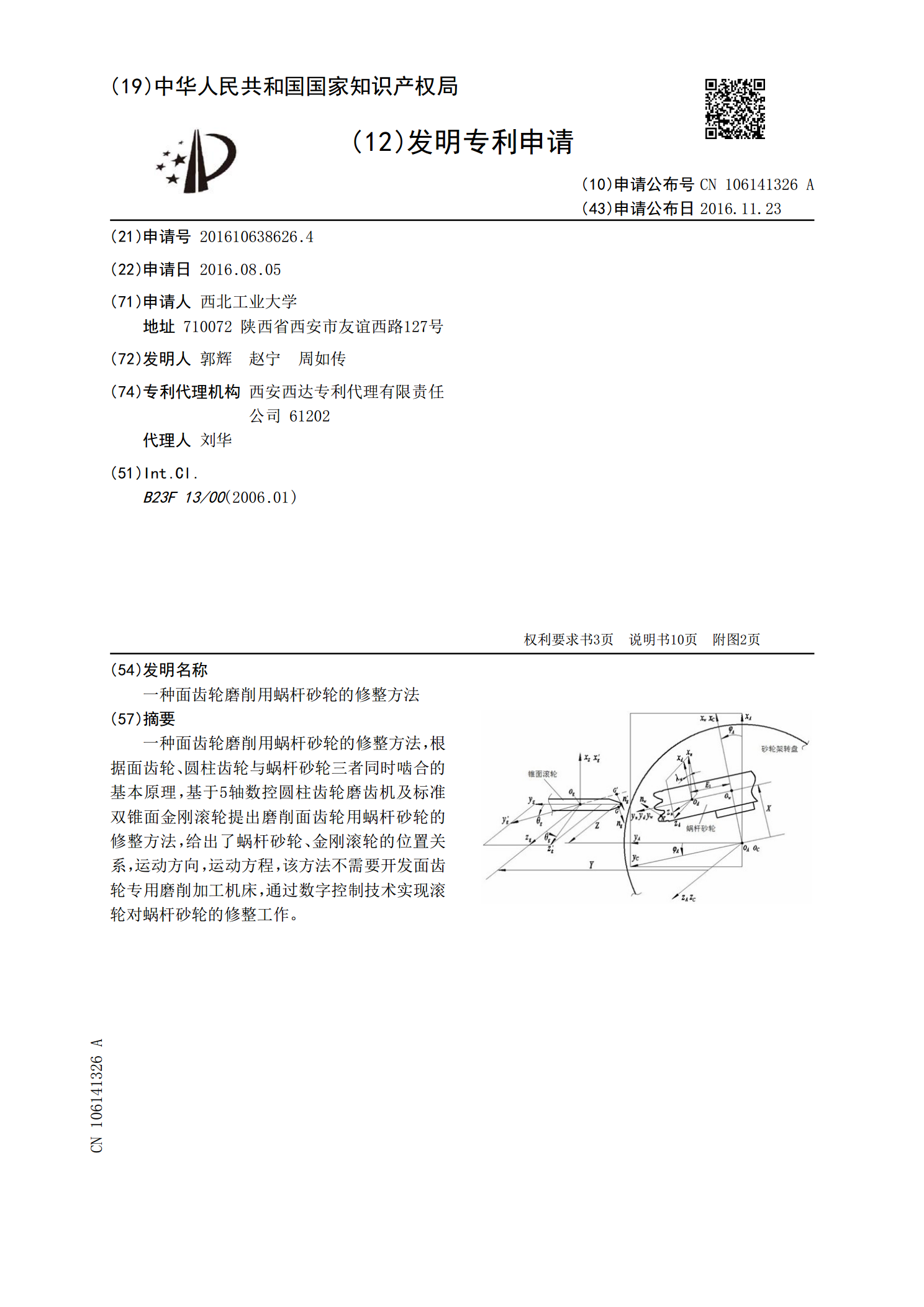
一种面齿轮磨削用蜗杆砂轮的修整方法,根据面齿轮、圆柱齿轮与蜗杆砂轮三者同时啮合的基本原理,基于5轴数控圆柱齿轮磨齿机及标准双锥面金刚滚轮提出磨削面齿轮用蜗杆砂轮的修整方法,给出了蜗杆砂轮、金刚滚轮的位置关系,运动方向,运动方程,该方法不需要开发面齿轮专用磨削加工机床,通过数字控制技术实现滚轮对蜗杆砂轮的修整工作。

面齿轮磨削碟形砂轮修整精度控制方法研究.docx
面齿轮磨削碟形砂轮修整精度控制方法研究面齿轮作为一种常用的机械传动元件,在现代机械制造中具有重要地位。而其制造中的关键技术之一就是面齿轮磨削,磨削精度的高低不仅影响其性能,还直接影响到整个机械传动系统的可靠性和效率。而针对面齿轮磨削中的碟形砂轮修整精度控制问题,我们进行了相关研究,本文将对此进行分析和总结。一、碟形砂轮的修整对面齿轮磨削的影响由于磨削工艺的特殊性,碟形砂轮的修整对面齿轮磨削有着重要的影响,过高或过低的修整误差都会导致磨削效果不佳。因此碟形砂轮的修整精度控制是面齿轮磨削的一个关键点。二、常规
通过蜗杆磨削轮磨削齿轮的方法和用于修整蜗杆磨削轮的修整辊.pdf
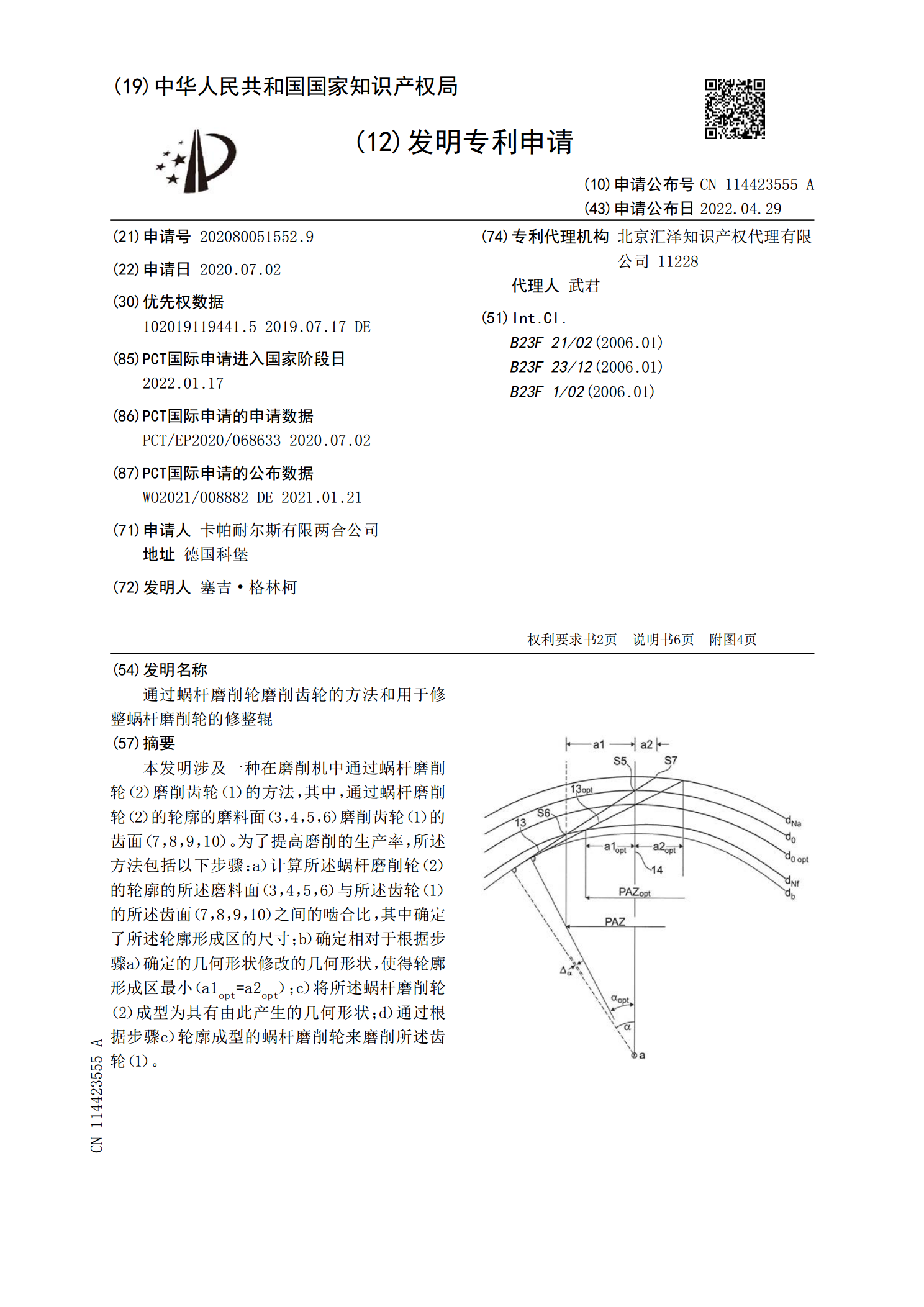
本发明涉及一种在磨削机中通过蜗杆磨削轮(2)磨削齿轮(1)的方法,其中,通过蜗杆磨削轮(2)的轮廓的磨料面(3,4,5,6)磨削齿轮(1)的齿面(7,8,9,10)。为了提高磨削的生产率,所述方法包括以下步骤:a)计算所述蜗杆磨削轮(2)的轮廓的所述磨料面(3,4,5,6)与所述齿轮(1)的所述齿面(7,8,9,10)之间的啮合比,其中确定了所述轮廓形成区的尺寸;b)确定相对于根据步骤a)确定的几何形状修改的几何形状,使得轮廓形成区最小(a1<base:Sub>opt</base:Sub>=a2<base

内齿轮磨削用螺纹状砂轮的修整方法.pdf
本发明提供一种通过使用高精度地制作的修整齿轮能够高精度地对用于磨削内齿轮的螺纹状砂轮进行修整的内齿轮磨削用螺纹状砂轮的修整方法。因此,在使桶形的螺纹状砂轮(11)与外齿式的修整齿轮(13)啮合的状态下,使螺纹状砂轮(11)与修整齿轮(13)同步旋转,并同时在X-Y平面内呈圆弧状地相对移动,从而修整齿轮(13)在螺纹状砂轮(11)的砂轮轴方向整个区域上进行修整,其中,螺纹状砂轮(11)以在内齿轮的磨削时提供的相对于该内齿轮(W)的轴角(Σ)配置,修整齿轮(13)能够与假想成取代以轴角(Σ)配置的螺纹砂轮(1
一种尼曼蜗杆磨削砂轮修整方法及装置.pdf
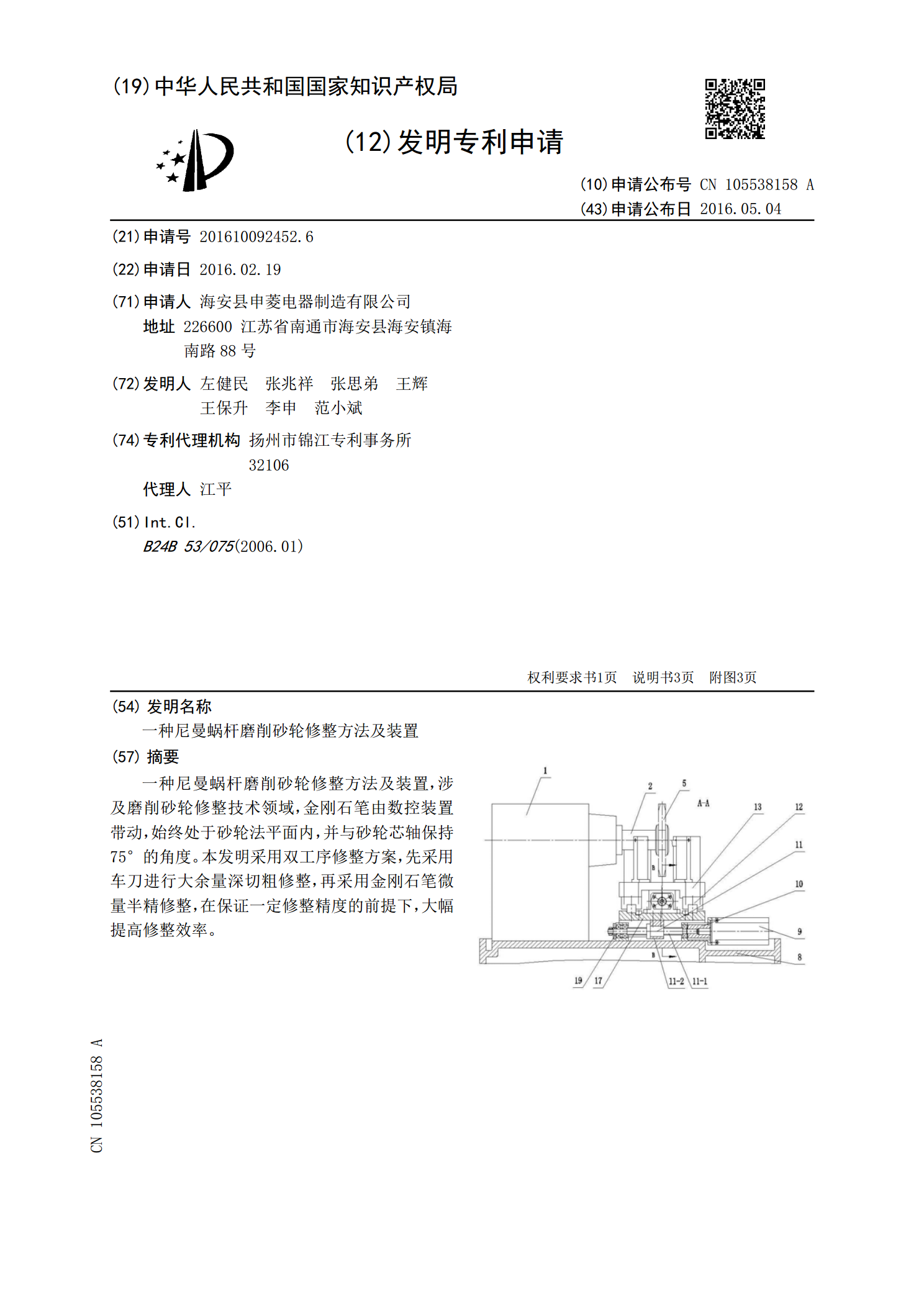
一种尼曼蜗杆磨削砂轮修整方法及装置,涉及磨削砂轮修整技术领域,金刚石笔由数控装置带动,始终处于砂轮法平面内,并与砂轮芯轴保持75°的角度。本发明采用双工序修整方案,先采用车刀进行大余量深切粗修整,再采用金刚石笔微量半精修整,在保证一定修整精度的前提下,大幅提高修整效率。