
外圆切入式磨削工件圆度误差实时计算方法.pdf

运升****魔王

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

外圆切入式磨削工件圆度误差实时计算方法.pdf
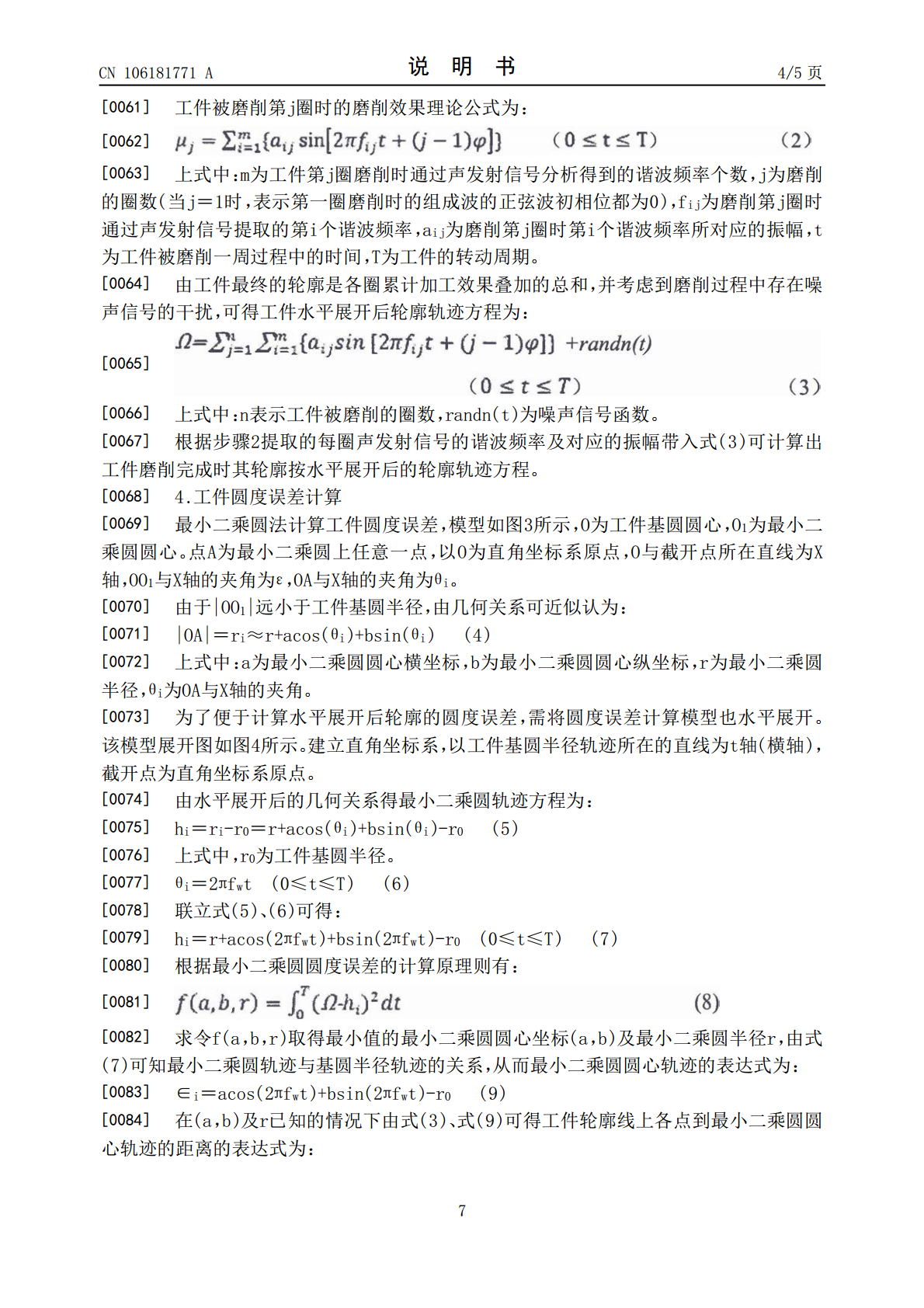
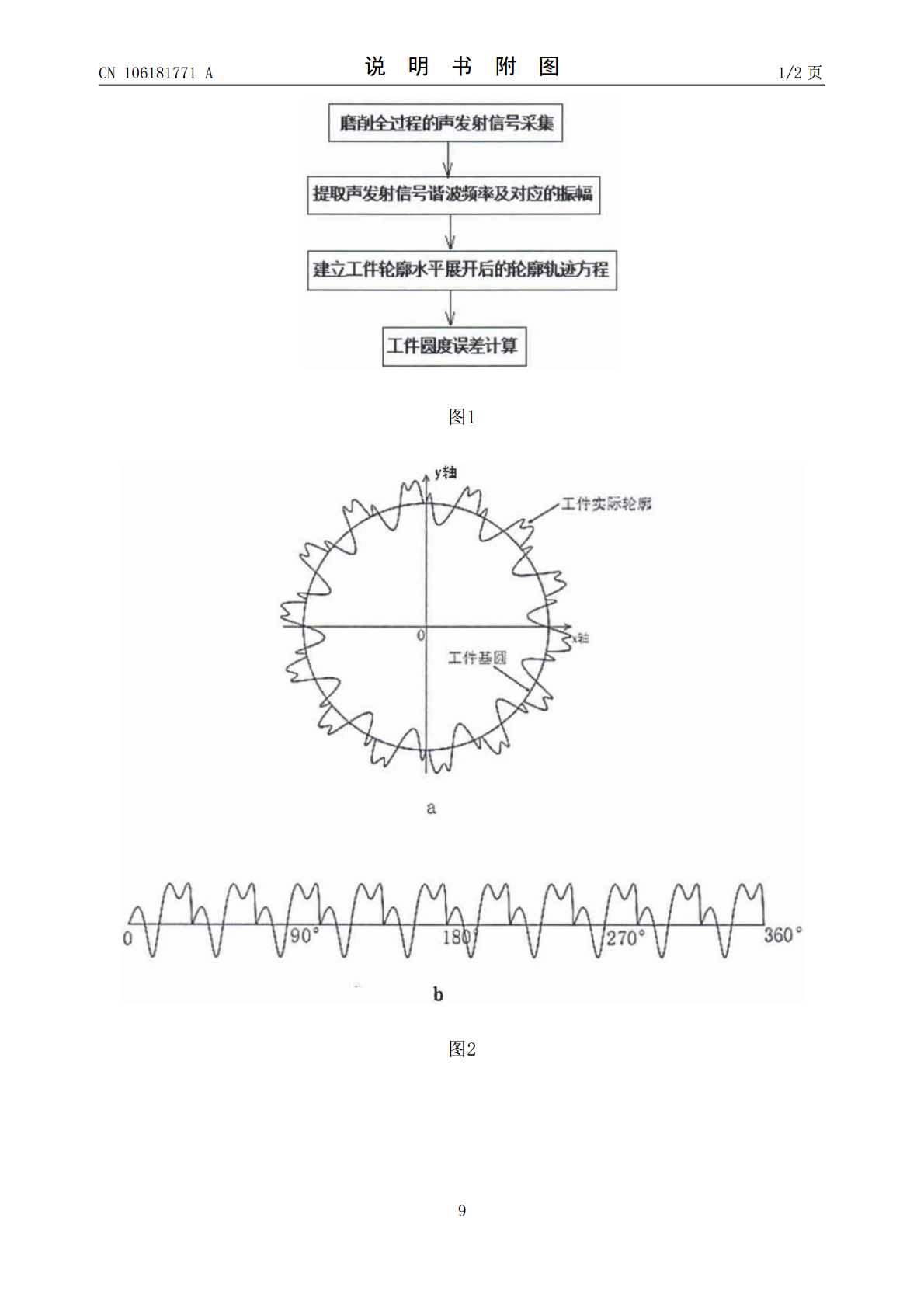
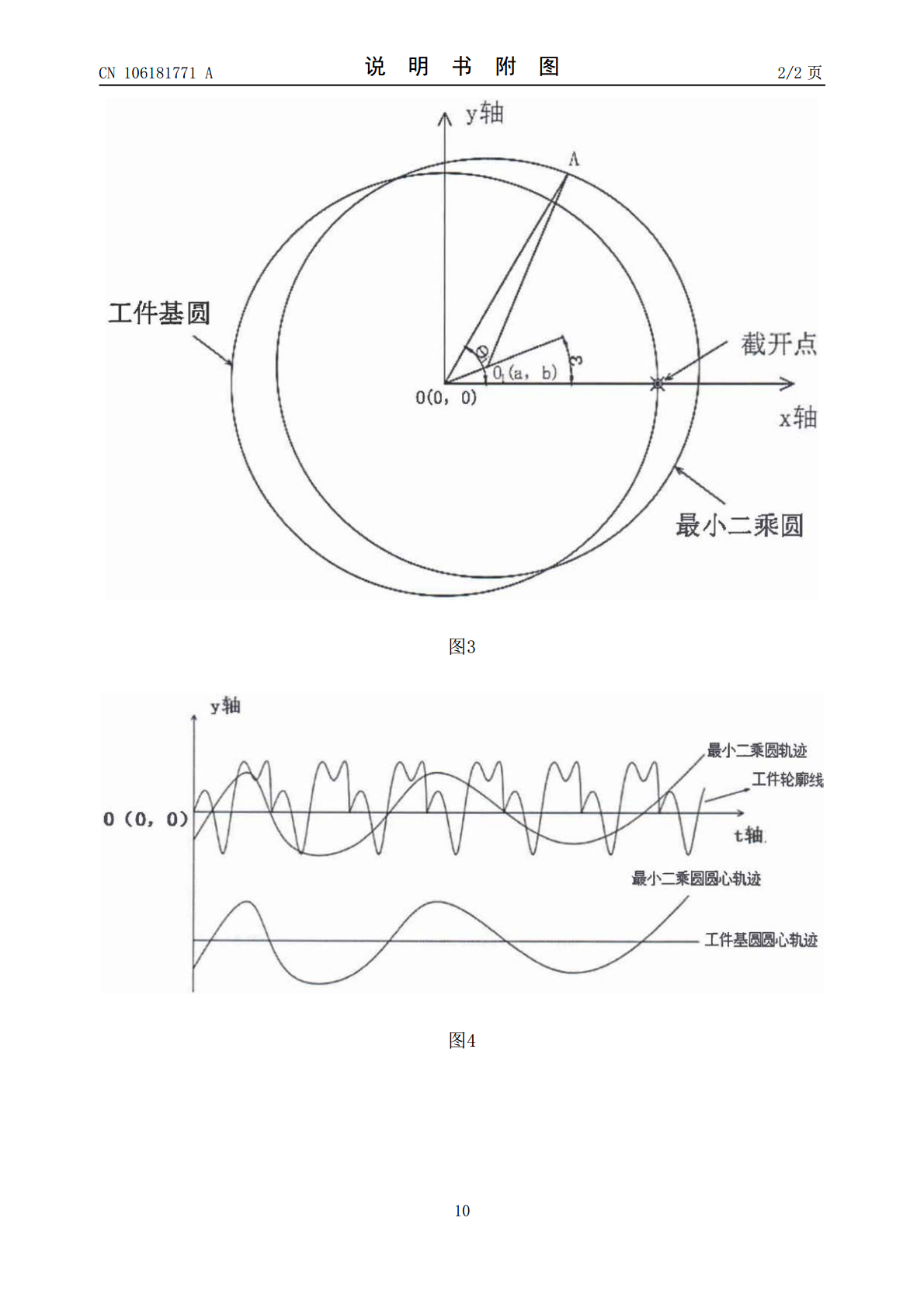
本发明涉及一种外圆切入式磨削工件圆度误差实时计算方法,首先,采集磨削全过程中的声发射信号,并对该信号进行滤波处理;接着通过傅里叶变换提取所获得信号的谐波频率及对应的振幅;然后通过工件最终轮廓是砂轮对工件每圈叠加加工效果的总和,并结合谐波频率及振幅建立工件轮廓水平展开后的轮廓轨迹方程;最后应用经过变形处理的最小二乘法来计算工件圆度误差。该计算方法对外圆切入磨削过程中工件圆度误差进行实时计算,克服了现有外圆磨削对圆度仪的依赖,提高磨削加工效率,节约生产成本。
用于外圆切入磨削工件圆度误差实时计算方法.pdf
本发明涉及一种用于外圆切入磨削工件圆度误差实时计算方法,先对驻留阶段磨削功率值测定,首先进行一次试加工,记录驻留阶段开始时的第一个功率值及之后的功率值;然后,建立磨削过程轮廓轨迹方程,通过进给阶段和驻留阶段实际材料去除量的变化关系建立磨削过程轮廓轨迹方程;最后,实时计算工件圆度误差,通过工件外圆轮廓极坐标方程可得出任意时刻工件的外圆轮廓,并结合圆度误差最小二乘法求出工件的圆度误差。该计算方法可以对外圆切入磨削过程中任意时刻工件圆度误差进行计算,在计算结果达到圆度误差要求时停止磨削,可提高磨削加工效率,节约

低粗糙度精密外圆切入磨削工件表面形貌的研究.docx
低粗糙度精密外圆切入磨削工件表面形貌的研究低粗糙度精密外圆切入磨削工件表面形貌的研究摘要:低粗糙度精密外圆切入磨削可以制造出高质量的工件表面,因此在工业制造中得到了广泛的应用。本文通过几种常见的磨削方法的比较,综述了低粗糙度精密外圆切入磨削的研究现状,探讨了工艺参数对磨削效果的影响,并分析了磨削过程中可能产生的问题和解决办法。研究表明,合理选择磨削参数和改进磨削工艺可以有效改善工件表面形貌,实现低粗糙度精密外圆切入磨削。关键词:低粗糙度;精密外圆切入磨削;工件表面形貌1.引言低粗糙度工件表面对于一些特殊的

用于无心外圆磨削的切入式磨床的加载装置以及用于无心外圆磨削的方法.pdf
本发明涉及一种用于无心外圆磨削的切入式磨床的加载装置(10),其具有:用于容纳待加工的毛坯工件(16)的容纳框架(14),其中所述容纳框架(14)设计成沿重力方向敞开;支承体(12),所述支承体用于形成用于容纳在所述容纳框架(14)中的毛坯工件(16)的支承底板(18);和作用在所述容纳框架(14)上的位移执行器(20),所述位移执行器用于使所述容纳框架(14)相对于所述支承体(12)轴向地位移到所述切入式磨床的磨削间隙(22)中,在所述磨削间隙处,所述容纳框架(14)相对于所述支承体(14)错开地定位,

外圆切入磨削参数优化.docx
外圆切入磨削参数优化论文题目:外圆切入磨削参数优化摘要:外圆切入磨削作为一种常见且重要的加工方法,其质量和效率对加工件的精度和生产效率具有重要影响。本文基于参数优化的方法,研究了外圆切入磨削过程中的关键参数,并通过实验验证了优化参数对加工效果的影响。研究结果表明,外圆切入磨削过程中,磨削速度、进给速度和磨削深度是影响加工质量和效率的重要参数,其优化对提高加工效果具有重要意义。关键词:外圆切入磨削,参数优化,加工质量,加工效率1.引言外圆切入磨削是一种常用的金属加工方法,广泛应用于航空、汽车、机械等领域。外