
具有路径记忆功能的智能运货小车.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有路径记忆功能的智能运货小车.pdf
本发明涉及一种具有路径记忆功能的智能运货小车,包括可在手动模式、记忆模式与自动运输模式中的任一种运行模式下运行的小车本体以及可控制所述小车本体的启停、行进方向以及在三种运行模式间进行切换的遥控装置,所述小车本体包括对称设在前侧的两动力轮及设在后侧的一万向轮:所述小车本体上设有主控模块以及与所述主控模块相连接的超声波测距模块、光电编码器、电子罗盘、摄像头、电机模块。本发明可以实现小车遥控操作,并可以实现小车在无人干预情况下,通过识别并存储的路径在自动传输模式下将货物从起点运送至终点,全程无需人工操作,且可在
一种具有弹射功能的智能小车.pdf
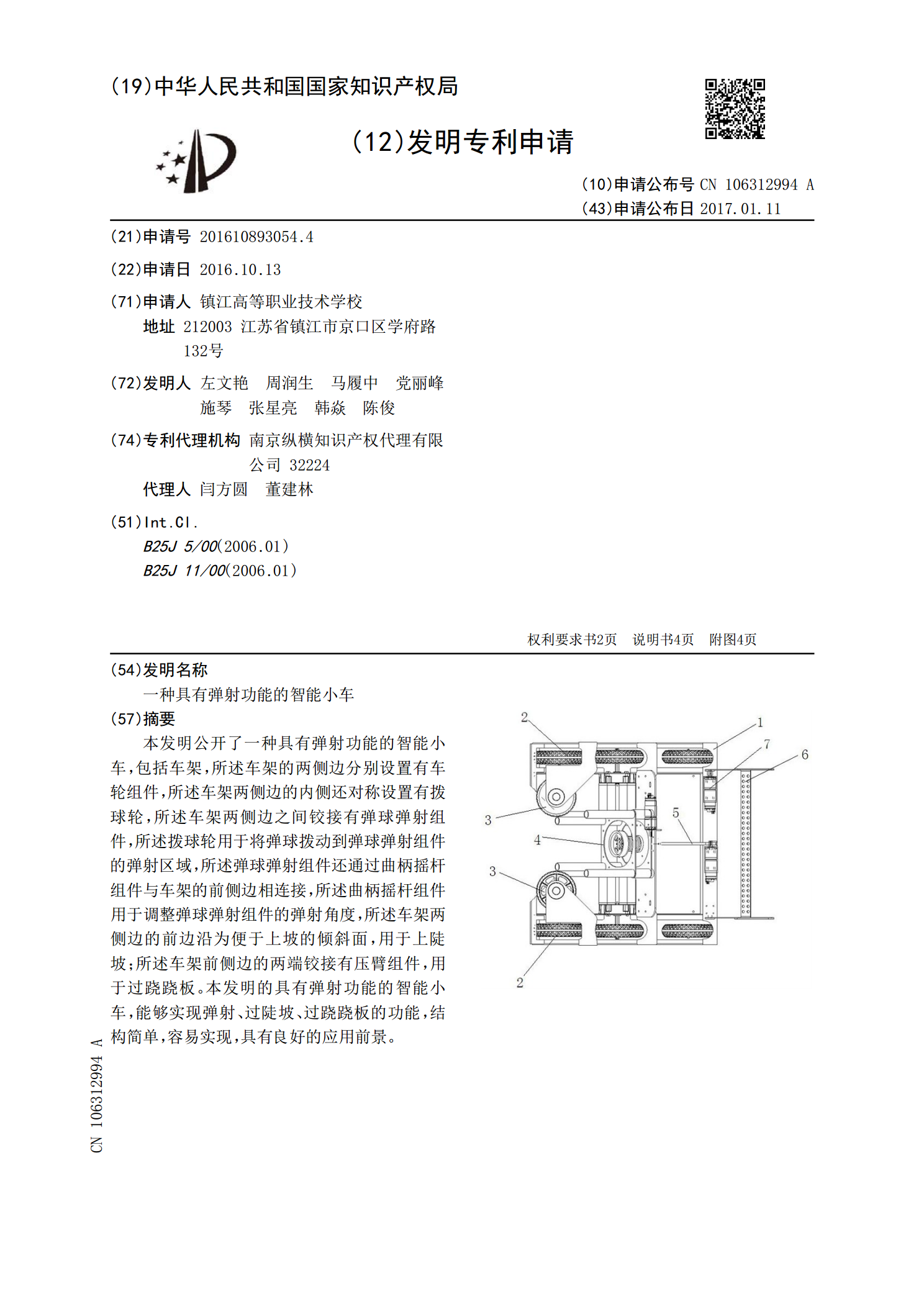
本发明公开了一种具有弹射功能的智能小车,包括车架,所述车架的两侧边分别设置有车轮组件,所述车架两侧边的内侧还对称设置有拨球轮,所述车架两侧边之间铰接有弹球弹射组件,所述拨球轮用于将弹球拨动到弹球弹射组件的弹射区域,所述弹球弹射组件还通过曲柄摇杆组件与车架的前侧边相连接,所述曲柄摇杆组件用于调整弹球弹射组件的弹射角度,所述车架两侧边的前边沿为便于上坡的倾斜面,用于上陡坡;所述车架前侧边的两端铰接有压臂组件,用于过跷跷板。本发明的具有弹射功能的智能小车,能够实现弹射、过陡坡、过跷跷板的功能,结构简单,容易实现

一种具有弹球发射功能的智能小车.pdf
本发明公开了一种具有弹球发射功能的智能小车,弹球发射组件通过曲柄摇杆组件与车架的前侧边相连接,曲柄摇杆组件用于调整弹球发射组件的发射角度,弹球发射组件的弹球导向杆套接有两层骨架板,安装固定板中部贯穿有弹球推杆,弹球推杆的后端部延伸出安装固定板的另一侧,安装固定板的另一侧安装有驱动机构,驱动机构的驱动输入端与驱动电机相连接,驱动机构的驱动输出端与弹球推杆相连接,驱动机构驱动弹球推杆进行弹性往复运动,用于将弹球输出到发射位置,安装固定板一侧的两端部对称设置有平行于弹球导向杆的支撑型材,支撑型材的前端部分别安装

一种具有记忆功能的智能单车及记忆方法.pdf
本发明公开了一种具有记忆功能的智能单车及记忆方法,属于单车领域,旨在解决单车的座椅需要频繁调整的问题,可以应用在共享单车的商业运营上,具体包括前轮、后轮、车座,智能锁系统,所述的智能单车包括:终端模块,所述的终端模块用于接收用户指令;服务器,所述的服务器包括存储部,所述的存储部用于存储用户数据以及和用户数据对应的最新骑行参数;控制器,所述的控制器无线连接于服务器,所述的控制器连接有车座控制系统以及智能锁系统;车座控制系统,所述的车座控制系统位于单车上,所述的车座控制系统可以自动调整车座高度。
具有装卸功能的搬运小车.pdf
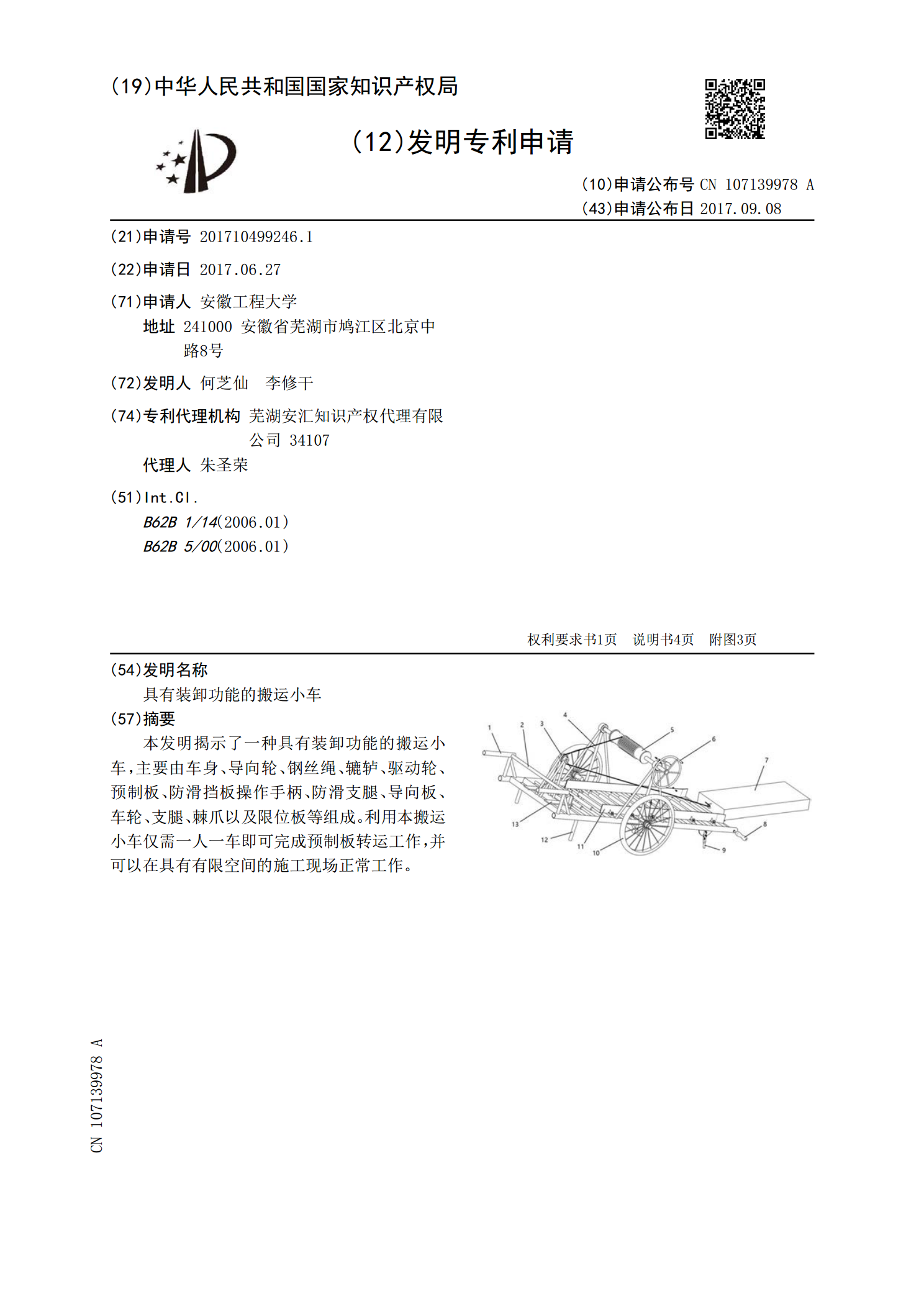
本发明揭示了一种具有装卸功能的搬运小车,主要由车身、导向轮、钢丝绳、辘轳、驱动轮、预制板、防滑挡板操作手柄、防滑支腿、导向板、车轮、支腿、棘爪以及限位板等组成。利用本搬运小车仅需一人一车即可完成预制板转运工作,并可以在具有有限空间的施工现场正常工作。