
一种水陆两栖无人船.pdf

邻家****mk


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水陆两栖无人船.pdf
一种水陆两栖无人船,船体上安装有用于推动船体移动的推进器、探测水下环境的探测装置、采集水样的采集装置,以及通信装置;除此之外,船体上还通过驱动轮、导向轮和支重轮安装有环形履带。该无人船可以通过履带在陆上行走,而在水中则通过推进器在水下移动。由此,无人船即可在沼泽地、淤泥地或者江河湖泊的浅水岸边行走,既可以顺利地快速进入水下工作,也可以完成各种探测、取样或测绘,从而极大地提高了无人船对于环境的适应能力,同时使其工作更加快速、准确,提高了其工作能力。
水陆两栖船.pdf
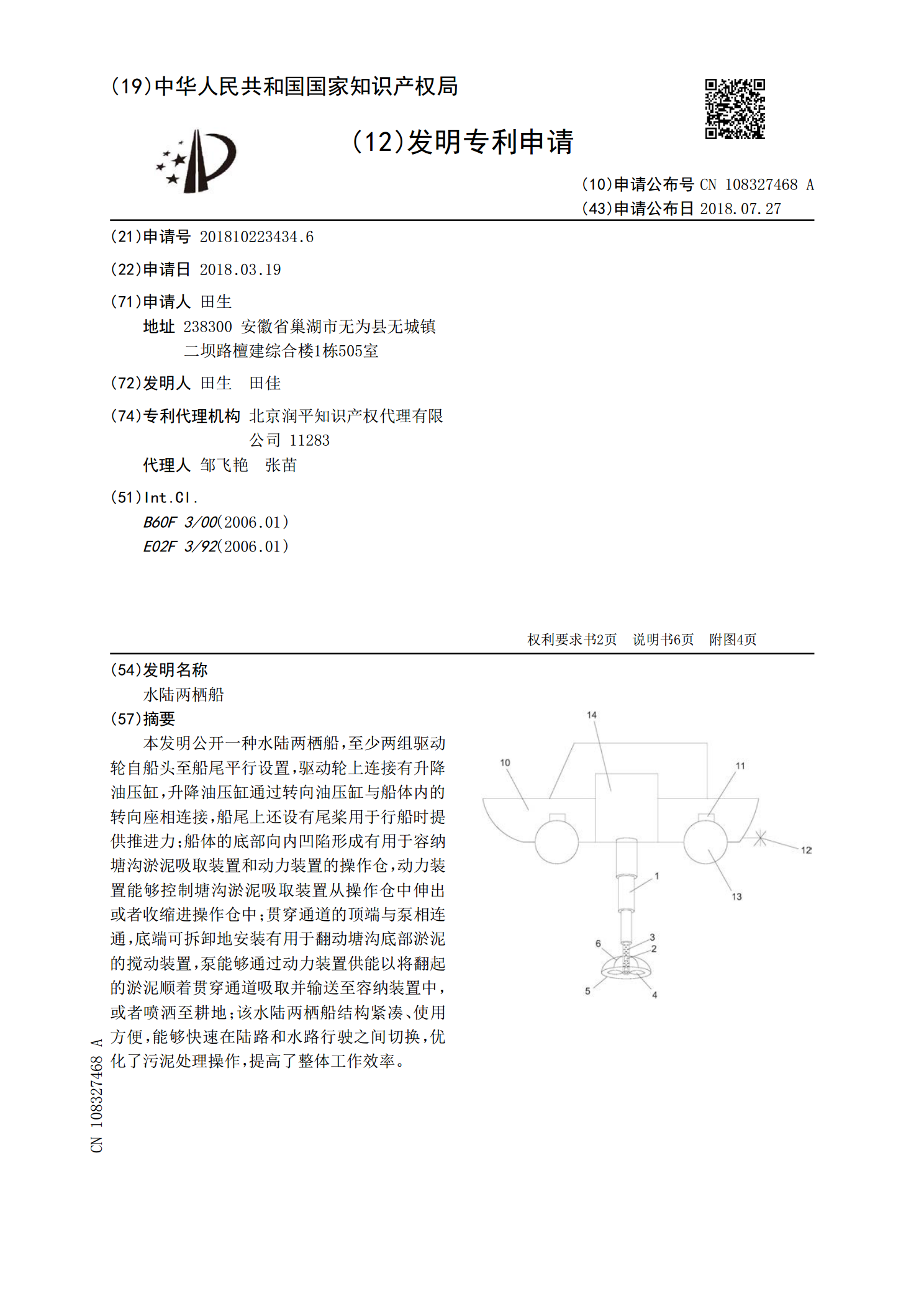
本发明公开一种水陆两栖船,至少两组驱动轮自船头至船尾平行设置,驱动轮上连接有升降油压缸,升降油压缸通过转向油压缸与船体内的转向座相连接,船尾上还设有尾桨用于行船时提供推进力;船体的底部向内凹陷形成有用于容纳塘沟淤泥吸取装置和动力装置的操作仓,动力装置能够控制塘沟淤泥吸取装置从操作仓中伸出或者收缩进操作仓中;贯穿通道的顶端与泵相连通,底端可拆卸地安装有用于翻动塘沟底部淤泥的搅动装置,泵能够通过动力装置供能以将翻起的淤泥顺着贯穿通道吸取并输送至容纳装置中,或者喷洒至耕地;该水陆两栖船结构紧凑、使用方便,能够快

一种可水陆两栖降落无人机.pdf
本发明涉及无人机技术领域,且公开了一种可水陆两栖降落无人机,包括机体,所述机体的外部固定连接有机臂,机臂的顶部活动连接有马达,马达的顶部活动连接有转轴,转轴远离马达的一端固定连接有机翼,机体的底部固定连接有支撑架,支撑架远离机体的一端活动连接有起落架,起落架远离支撑架的一端固定连接有起落头,起落架的外部活动连接有支杆,支杆的外部活动连接有气囊,通过起落架和支撑架的配合使用,无人机在陆地降落时,起落架张开,增加起落架的降落面积,降低无人机的重心,增加无人机的降落稳定性,通过起落架、支杆和气囊的配合使用,在无
一种多功能水陆两栖无人机.pdf
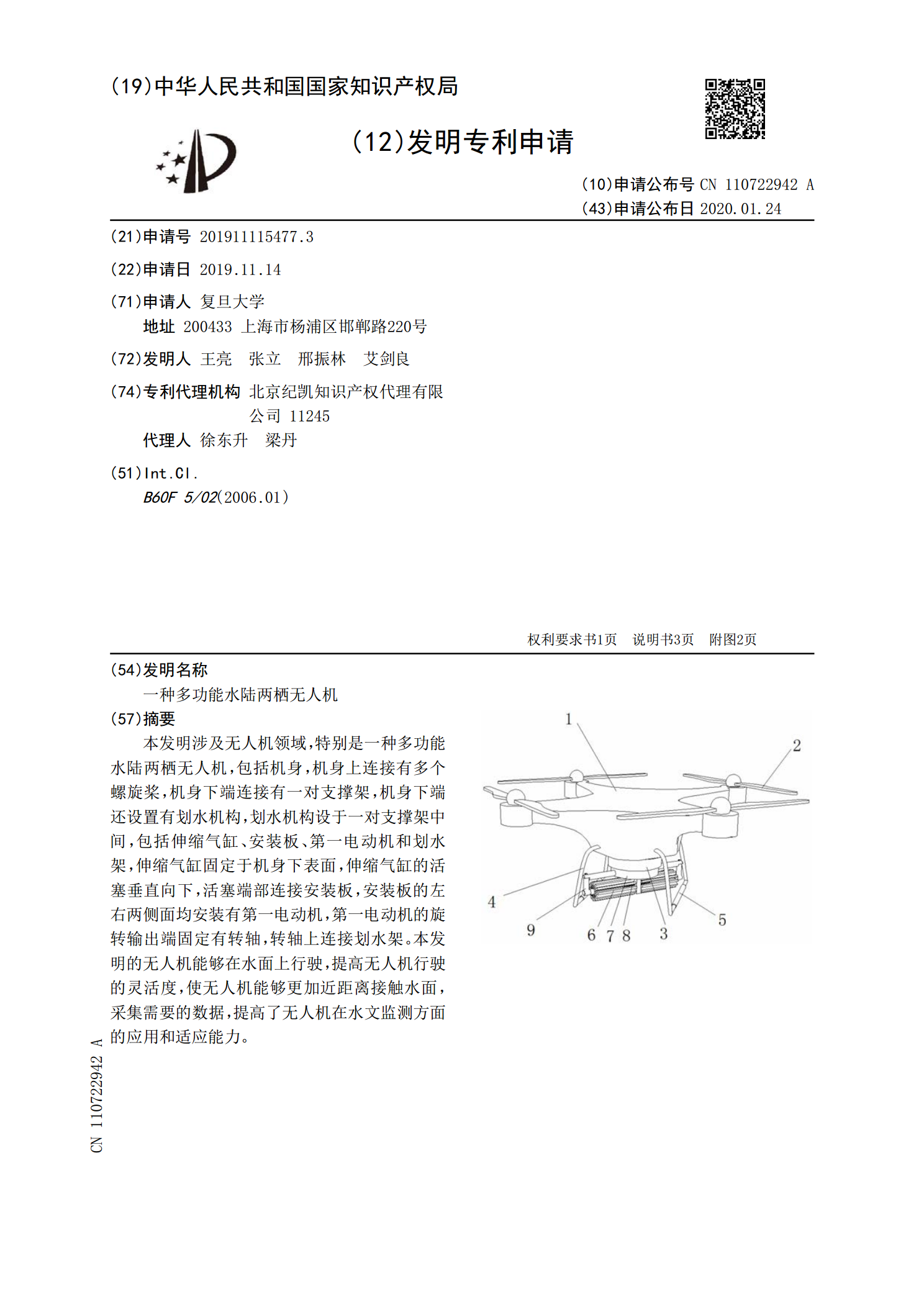
本发明涉及无人机领域,特别是一种多功能水陆两栖无人机,包括机身,机身上连接有多个螺旋桨,机身下端连接有一对支撑架,机身下端还设置有划水机构,划水机构设于一对支撑架中间,包括伸缩气缸、安装板、第一电动机和划水架,伸缩气缸固定于机身下表面,伸缩气缸的活塞垂直向下,活塞端部连接安装板,安装板的左右两侧面均安装有第一电动机,第一电动机的旋转输出端固定有转轴,转轴上连接划水架。本发明的无人机能够在水面上行驶,提高无人机行驶的灵活度,使无人机能够更加近距离接触水面,采集需要的数据,提高了无人机在水文监测方面的应用和适

一种水陆两栖无人测绘艇及其测绘方法.pdf
本发明属于无人艇技术领域,具体公开了一种水陆两栖无人测绘艇,包括艇体,艇体上设有控制箱,艇体的尾部设有喷水推进器,艇体底部设有前轮系统和后轮系统,艇体底面的前端设有声呐;前轮系统包括前轮支架,前轮支架一端与艇体底部转动连接,其另一端的两侧转动连接有前滚轮;后轮系统包括后轮支架,后轮支架一端与艇体底部转动连接,其另一端的两侧转动连接有后滚轮;前轮支架和后轮支架上均铰接有液压伸缩缸,液压伸缩缸缸体底部与艇体底面转动连接;所述艇体底面前端设有与前轮系统相适配的前轮系统回收腔,其后端设有与后轮系统相适配的后轮系统