
一种多功能清洁机器人.pdf

春岚****23

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多功能清洁机器人.pdf
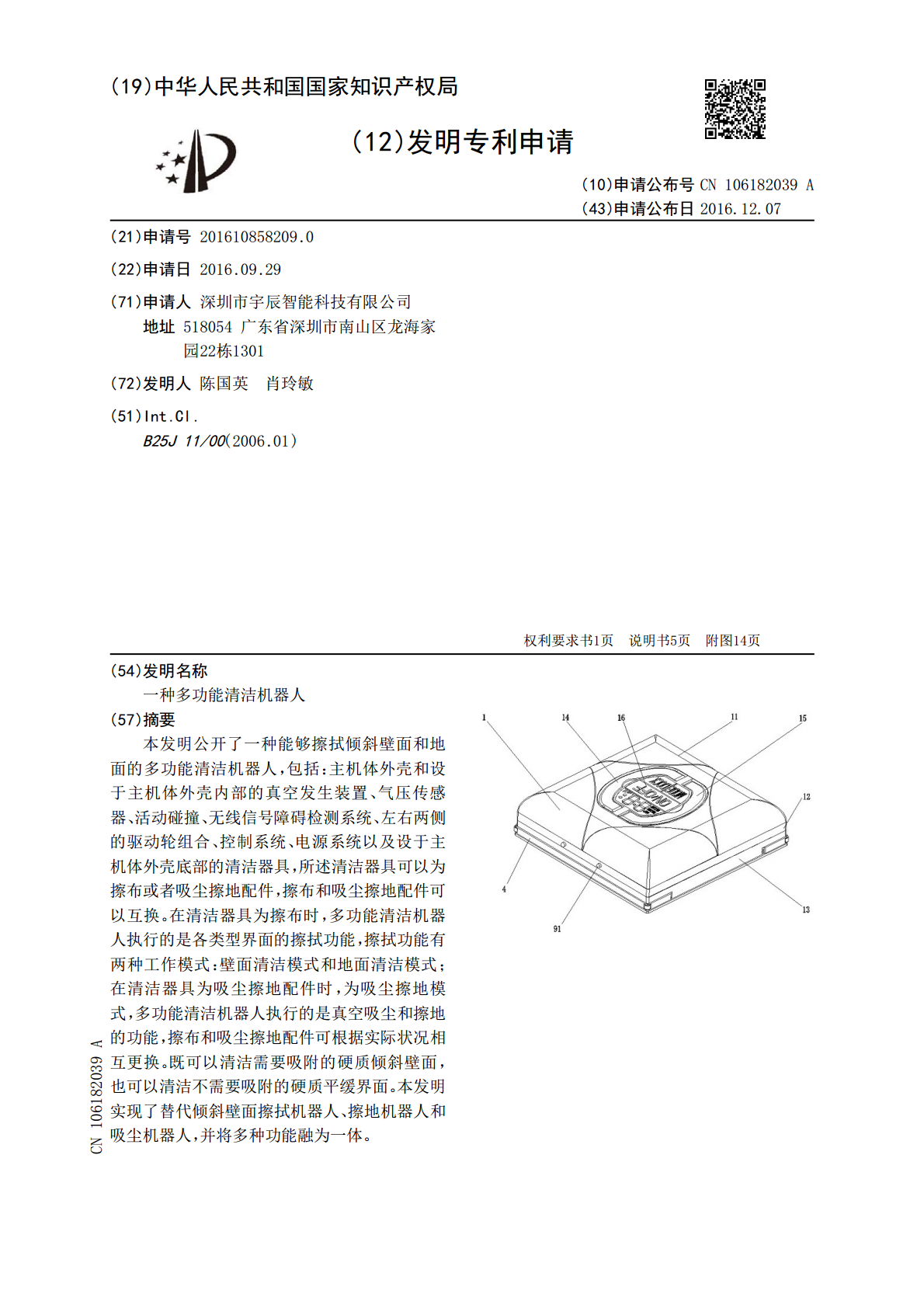
本发明公开了一种能够擦拭倾斜壁面和地面的多功能清洁机器人,包括:主机体外壳和设于主机体外壳内部的真空发生装置、气压传感器、活动碰撞、无线信号障碍检测系统、左右两侧的驱动轮组合、控制系统、电源系统以及设于主机体外壳底部的清洁器具,所述清洁器具可以为擦布或者吸尘擦地配件,擦布和吸尘擦地配件可以互换。在清洁器具为擦布时,多功能清洁机器人执行的是各类型界面的擦拭功能,擦拭功能有两种工作模式:壁面清洁模式和地面清洁模式;在清洁器具为吸尘擦地配件时,为吸尘擦地模式,多功能清洁机器人执行的是真空吸尘和擦地的功能,擦布和

一种多功能清洁机器人.pdf
本发明公开了一种多功能清洁机器人,包括机器人主体,图像采集装置和用于采集周围景象的图像传感器,图像传感器底部安装有联结杆,联结杆底部安装有总控制系统,图像采集装置与总控制系统通过联结杆固定连接,在机器人主体的左右两侧设置有左机械臂和右机械臂,左机械臂的顶端安装有大臂和第一腕摆带轮,左机械臂和大臂通过第一腕摆带轮固定连接,且右机械臂向下倾斜设置,机器人主体的底部安装有运动底盘,运动底盘的一侧安装有垃圾收纳盒和灰尘收纳盒,该种多功能清洁机器人,通过总控制系统控制联结杆转动进而带动图像传感器的转动,达到采集周围

一种多功能玻璃清洁机器人.pdf
本发明公开了一种多功能玻璃清洁机器人,多功能玻璃清洁机器人通过负压风机吸附在玻璃幕墙上,通过污渍识别装置对污渍的识别,识别到污渍后,清洁旋转盘转动,水泵将清水水箱中的清洗剂输送至喷头,喷头将清洗剂喷出,从而对玻璃幕墙清洁。渍识别系统识别到污渍消失时,水泵从清水水箱中抽取清水输送到喷头,喷头将清水喷到玻璃幕墙上对玻璃幕墙进行清洗,然后开启烘干装置对遗留的水迹进行快速烘干,从而完成清洁工作。解决了人工清洁玻璃幕墙所存在的安全和成本问题,还能够及时维持玻璃幕墙的清洁。

一种多功能的智能清洁机器人.pdf
本发明公开了一种多功能的智能清洁机器人,包括机器人主体,机器人主体底部的前后端分别设有转向轮与行走轮,机器人主体还包括扫地单元与拖地单元;扫地单元包括设在机器人主体的底部的起尘刷、位于起尘刷后方的吸尘口、与吸尘口连接的集尘盒、用于控制集尘盒开闭的第一步进电机;拖地单元包括设在扫地单元后方的抹布、驱动抹布进行工作与换洗的驱动旋转模块、用于清洗抹布的水盒,水盒上下方分别设有进水管与出水管;还包括基座,所述基座设有储水箱、出水口与垃圾桶,储水箱、出水口、垃圾桶与进水管、出水管、集尘盒的位置一一对应。本发明具有自

一种多功能玻璃清洁机器人及控制方法.pdf
本发明公开了一种多功能玻璃清洁机器人及控制方法,包括箱体、吸附系统、行走转向系统、供水系统、清洗系统及自动控制系统,且吸附系统及供水系统装设于箱体内,行走转向系统及清洗系统装设于箱体的下部。吸附系统包括三相电机、气压腔、涵道及扇叶;行走转向系统包括四套轮式结构,每一轮式结构均包括直流电机、减速器、车轮及固定板;供水系统包括曲柄凸轮机构及依序连接的导气管、水箱及供水导管;清洗系统包括清洗电机、锥齿轮、玻璃刷、玻璃刮及玻璃布;自动控制系统包括中央控制器、红外线遥感器及报警装置。本发明结构简单,携带方便,成本低