
一种智能导航机器人及其导航方法.pdf

朋兴****en


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能导航机器人及其导航方法.pdf
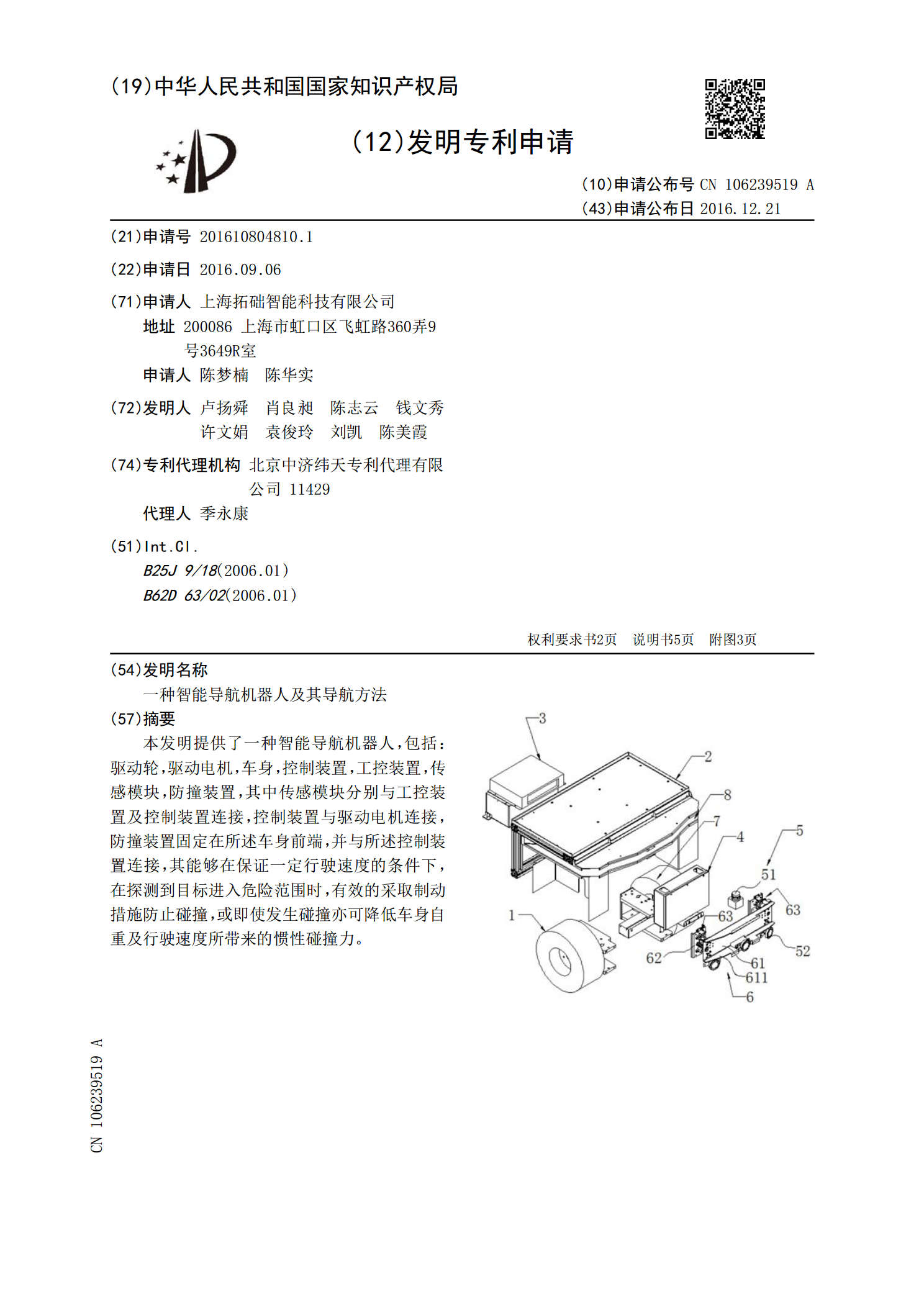
本发明提供了一种智能导航机器人,包括:驱动轮,驱动电机,车身,控制装置,工控装置,传感模块,防撞装置,其中传感模块分别与工控装置及控制装置连接,控制装置与驱动电机连接,防撞装置固定在所述车身前端,并与所述控制装置连接,其能够在保证一定行驶速度的条件下,在探测到目标进入危险范围时,有效的采取制动措施防止碰撞,或即使发生碰撞亦可降低车身自重及行驶速度所带来的惯性碰撞力。

一种智能导航设备及导航方法.pdf
本发明公开了一种智能导航设备,属于智能导航领域,智能导航设备包括处理器和与处理器电连接的定位模块、图像采集模块、测距模块、语音系统、电池和存储器,定位模块用于定位;图像采集模块用于采集道路视频及图像信息,图像采集模块包括摄像机、镜头和照明光源;语音系统用于进行语音信息的输入以及处理器进行语音信息的输出,语音系统包括语音识别模块、语音输入装置和语音输出装置;处理器用于对道路视频及图像信息、语音信息进行处理;存储器用于存储地图信息和道路视频及图像信息;图像采集模块、测距模块安装在防抖装置上,防抖装置安装在帽子
一种自主导航的机器人及其自主导航方法.pdf
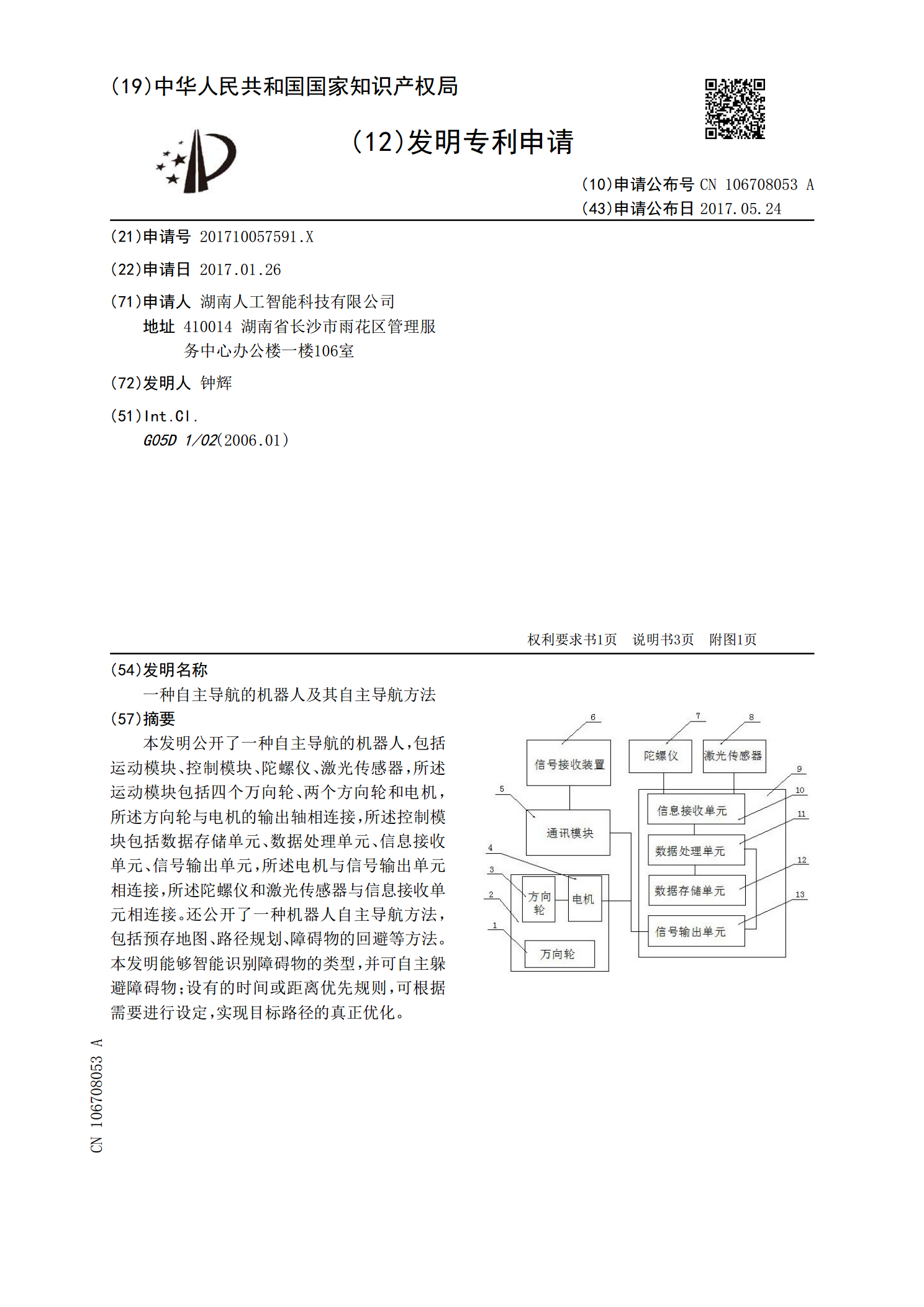
本发明公开了一种自主导航的机器人,包括运动模块、控制模块、陀螺仪、激光传感器,所述运动模块包括四个万向轮、两个方向轮和电机,所述方向轮与电机的输出轴相连接,所述控制模块包括数据存储单元、数据处理单元、信息接收单元、信号输出单元,所述电机与信号输出单元相连接,所述陀螺仪和激光传感器与信息接收单元相连接。还公开了一种机器人自主导航方法,包括预存地图、路径规划、障碍物的回避等方法。本发明能够智能识别障碍物的类型,并可自主躲避障碍物;设有的时间或距离优先规则,可根据需要进行设定,实现目标路径的真正优化。
一种智能导航帽及其控制方法.pdf
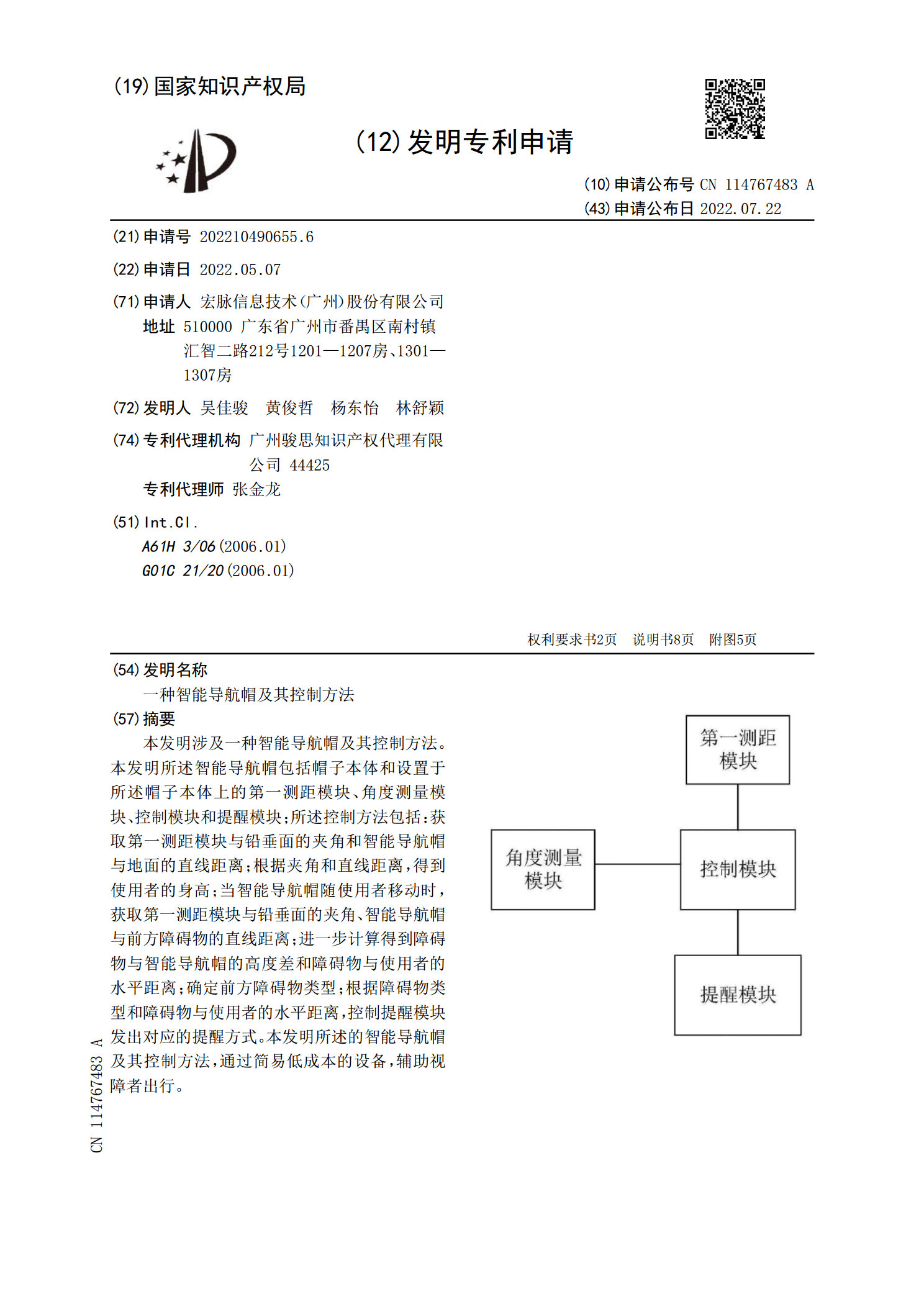
本发明涉及一种智能导航帽及其控制方法。本发明所述智能导航帽包括帽子本体和设置于所述帽子本体上的第一测距模块、角度测量模块、控制模块和提醒模块;所述控制方法包括:获取第一测距模块与铅垂面的夹角和智能导航帽与地面的直线距离;根据夹角和直线距离,得到使用者的身高;当智能导航帽随使用者移动时,获取第一测距模块与铅垂面的夹角、智能导航帽与前方障碍物的直线距离;进一步计算得到障碍物与智能导航帽的高度差和障碍物与使用者的水平距离;确定前方障碍物类型;根据障碍物类型和障碍物与使用者的水平距离,控制提醒模块发出对应的提醒方

智能导航车及其操控方法.pdf
本发明公开了一种智能导航车及其操控方法,旨在克服现有智能车易发生失稳的问题。该车由信号采集系统、智能导航系统和行驶系统组成。信号采集系统包括CCD图像传感器、光电编码器、加速度传感器、横摆角速度传感器和轮速传感器。CCD图像传感器、光电编码器、加速度传感器、横摆角速度传感器和轮速传感器分别和智能导航系统的单片机电连接。行驶系统包括的制动机构主要由伺服电机、摆臂及制动闸片组成。伺服电机和单片机电连接,伺服电机固定在驱动机构固定架上,伺服电机的输出端与摆臂中水平横臂花键连接,摆臂的两垂直臂的底端铰接制动闸片。