
一种康复理疗行走机器人机构.pdf

冬易****娘子


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种康复理疗行走机器人机构.pdf
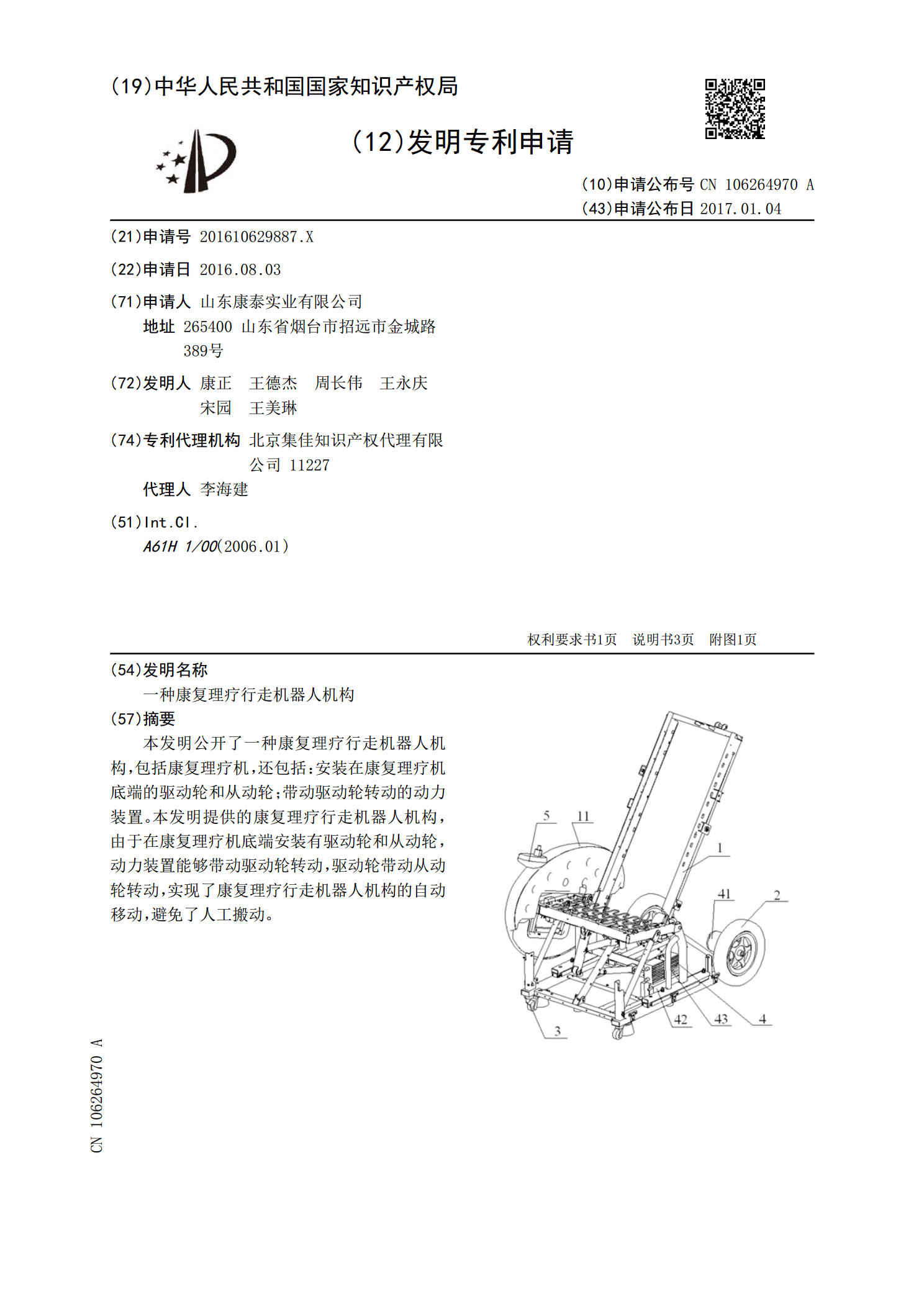
本发明公开了一种康复理疗行走机器人机构,包括康复理疗机,还包括:安装在康复理疗机底端的驱动轮和从动轮;带动驱动轮转动的动力装置。本发明提供的康复理疗行走机器人机构,由于在康复理疗机底端安装有驱动轮和从动轮,动力装置能够带动驱动轮转动,驱动轮带动从动轮转动,实现了康复理疗行走机器人机构的自动移动,避免了人工搬动。
一种术后康复理疗机器人.pdf
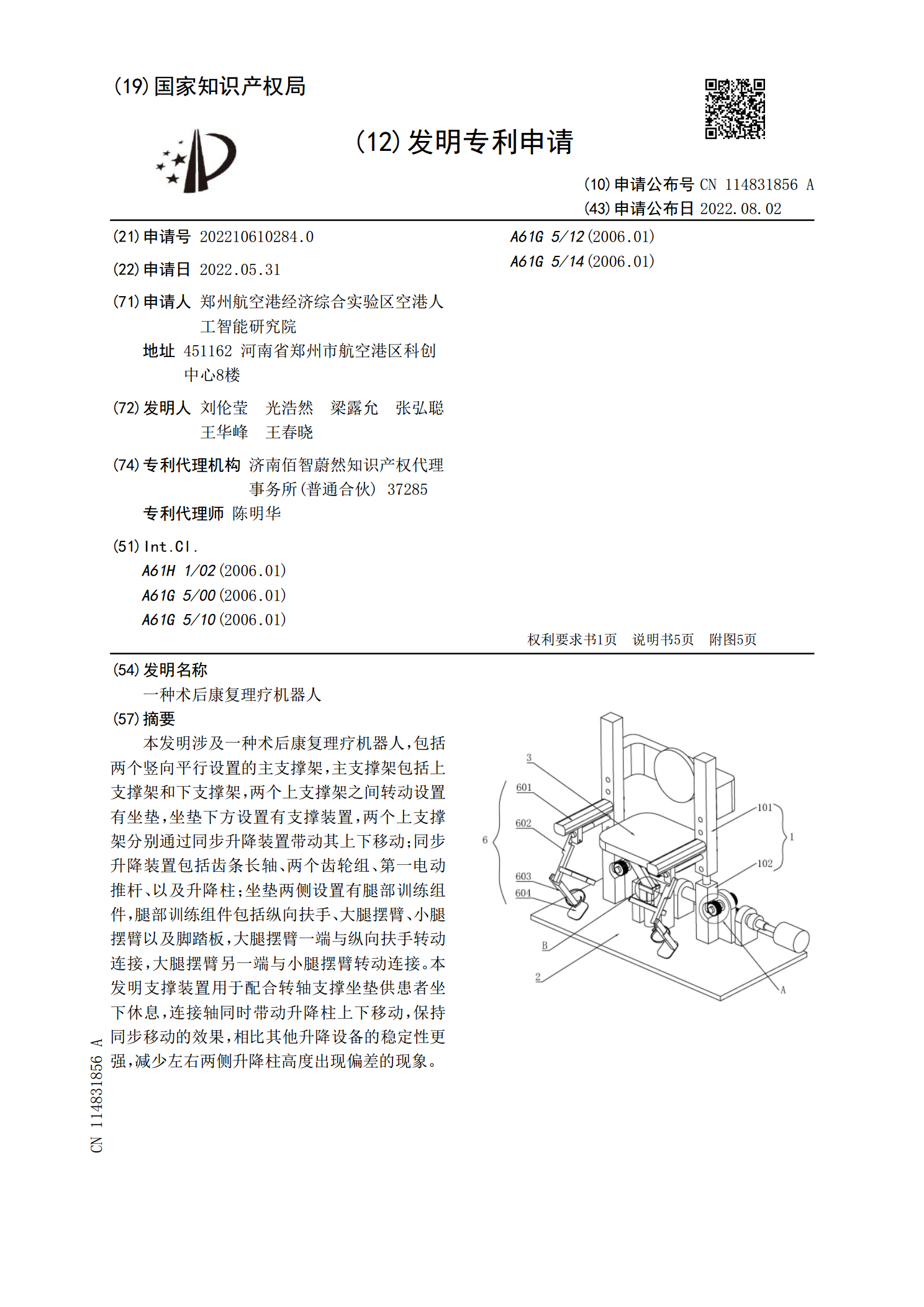
本发明涉及一种术后康复理疗机器人,包括两个竖向平行设置的主支撑架,主支撑架包括上支撑架和下支撑架,两个上支撑架之间转动设置有坐垫,坐垫下方设置有支撑装置,两个上支撑架分别通过同步升降装置带动其上下移动;同步升降装置包括齿条长轴、两个齿轮组、第一电动推杆、以及升降柱;坐垫两侧设置有腿部训练组件,腿部训练组件包括纵向扶手、大腿摆臂、小腿摆臂以及脚踏板,大腿摆臂一端与纵向扶手转动连接,大腿摆臂另一端与小腿摆臂转动连接。本发明支撑装置用于配合转轴支撑坐垫供患者坐下休息,连接轴同时带动升降柱上下移动,保持同步移动的

一种医疗腿骨康复理疗机构.pdf
本发明涉及骨科复健技术领域,且公开了一种医疗腿骨康复理疗机构,包括支撑架,所述支撑架的表面焊接有固定杆,所述固定杆的左端转动连接有转动杆,所述转动杆的表面设置有恢复机构,所述支撑架的表面固定连接有连接板,所述连接板的内部设置有驱动机构,所述转动板的表面设置有辅助机构。该种医疗腿骨康复理疗机构,首先经过腿部的直接进行和电机的辅助驱动,来带动动力轴的辅助运动,从而使得用户在使用的时候,可以进行自行踩踏,也可以进行电机的辅助驱动,来对不同康复时间段的用户进行使用,避免新患者在进行复健时控制不好腿部的用力,对腿骨
一种辅助理疗的康复机器人.pdf
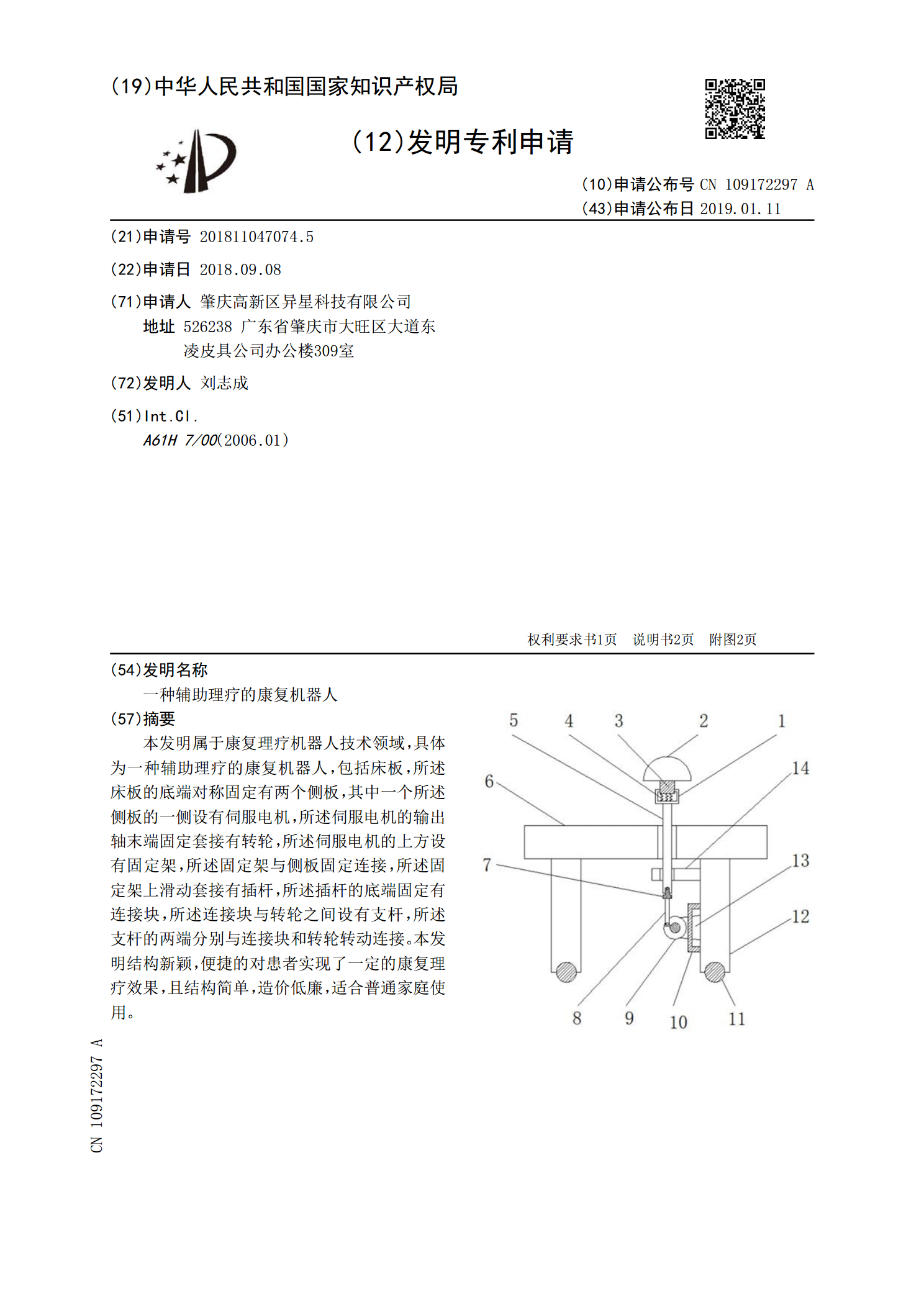
本发明属于康复理疗机器人技术领域,具体为一种辅助理疗的康复机器人,包括床板,所述床板的底端对称固定有两个侧板,其中一个所述侧板的一侧设有伺服电机,所述伺服电机的输出轴末端固定套接有转轮,所述伺服电机的上方设有固定架,所述固定架与侧板固定连接,所述固定架上滑动套接有插杆,所述插杆的底端固定有连接块,所述连接块与转轮之间设有支杆,所述支杆的两端分别与连接块和转轮转动连接。本发明结构新颖,便捷的对患者实现了一定的康复理疗效果,且结构简单,造价低廉,适合普通家庭使用。

一种辅助理疗的康复机器人.pdf
本发明公开了一种辅助理疗的康复机器人,其结构包括左侧上肢训练装置,左护板、底座、右护板、按摩装置、右侧上肢训练装置、机体,底座的一侧安装有左护板,底座的另一侧连接有右护板,底座垂直设于相互平行的左护板与右护板之间,与现有技术相比,本发明的有益效果是:该康复机器人具有臀部按摩的功能,通过旋转带动平移机构、四倍齿轮旋转机构、按摩头旋转机构等部件的组合设置,具有臀部正反转按摩的功能,能够在对上肢进行康复训练的同时,能够对患者的臀部进行按摩,有助于促进血液循环,避免下肢发生浮肿的问题,有助于缓解紧张,避免肌肉变得