
一种术后康复理疗机器人.pdf

一吃****永贺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种术后康复理疗机器人.pdf
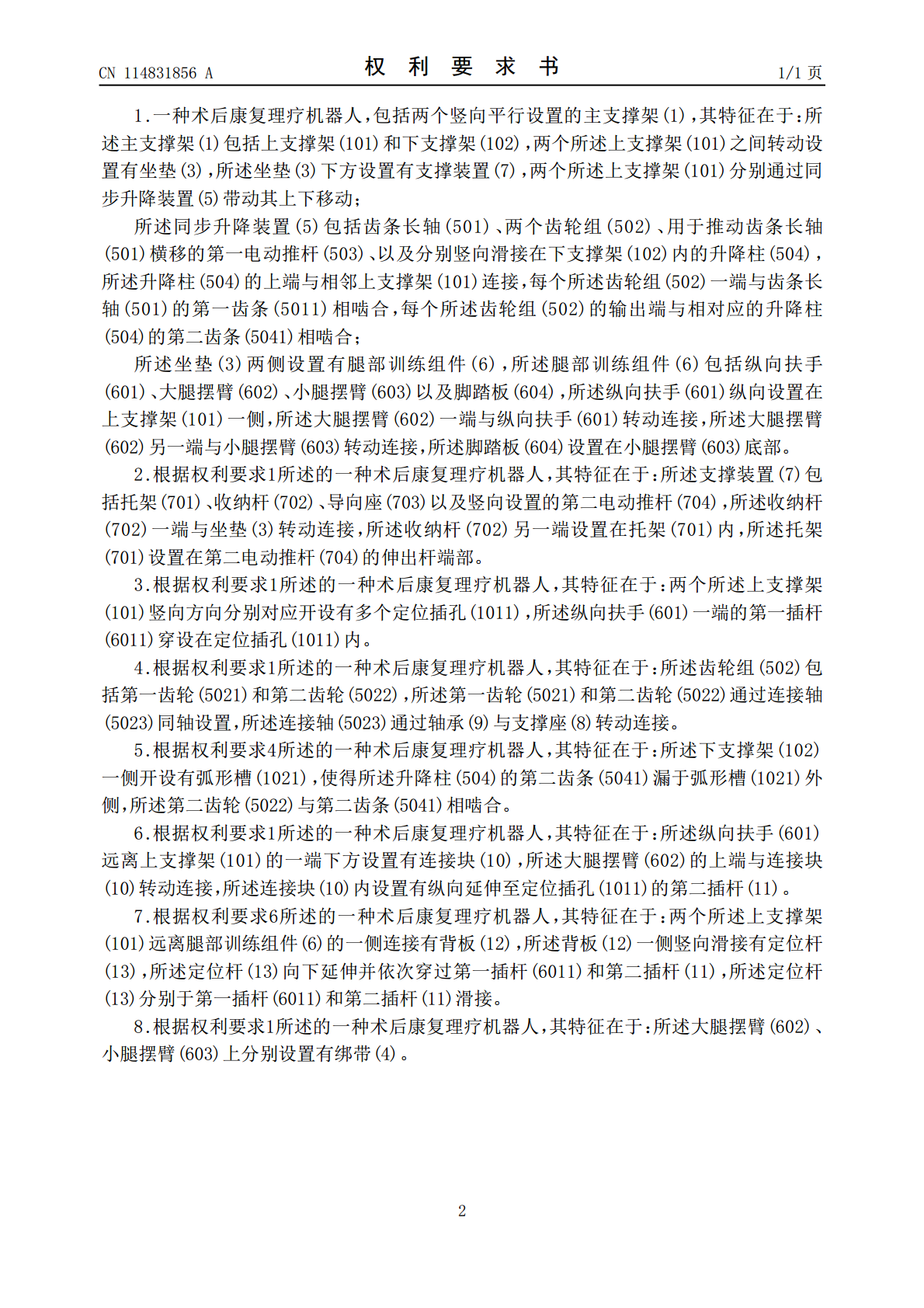
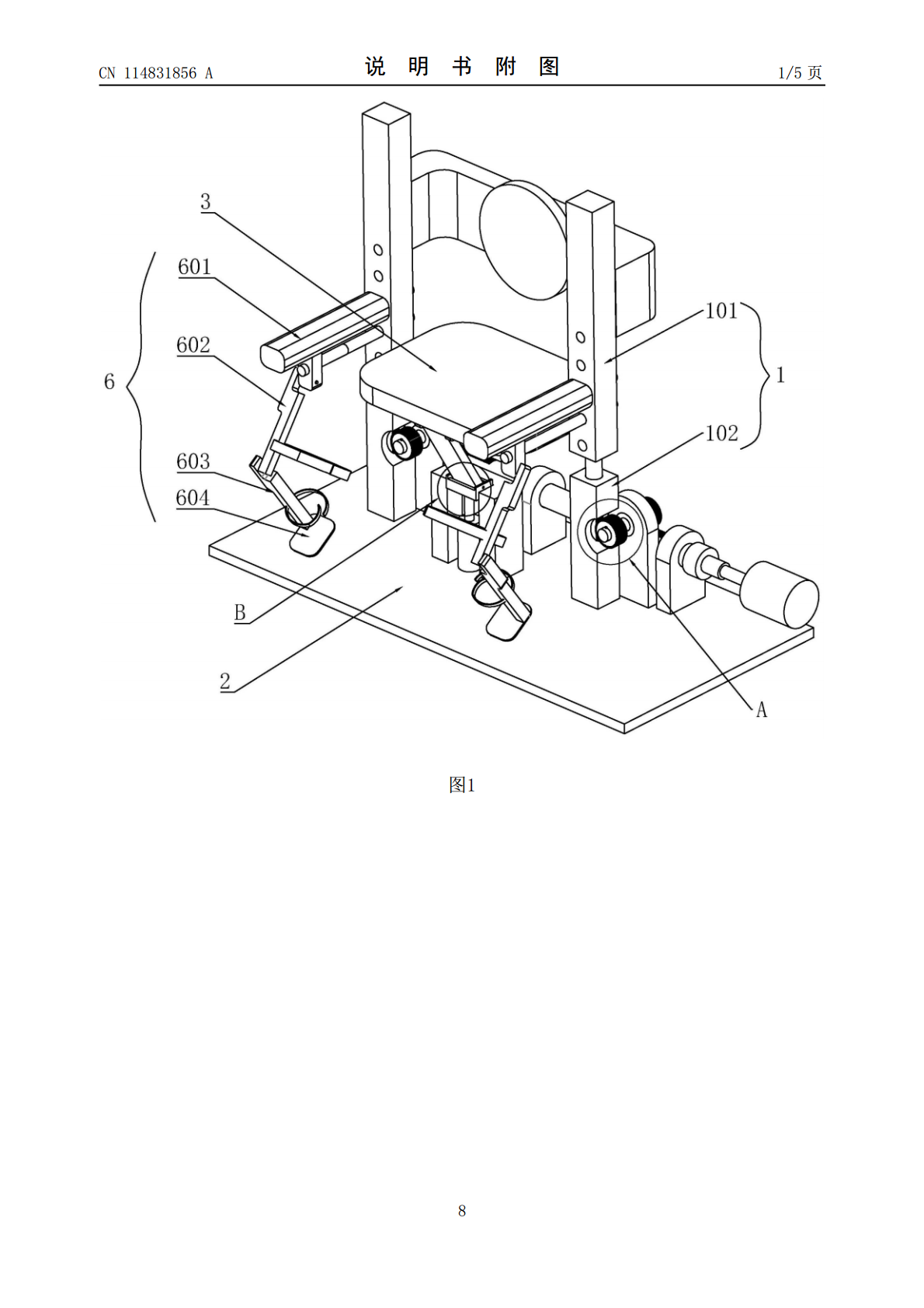
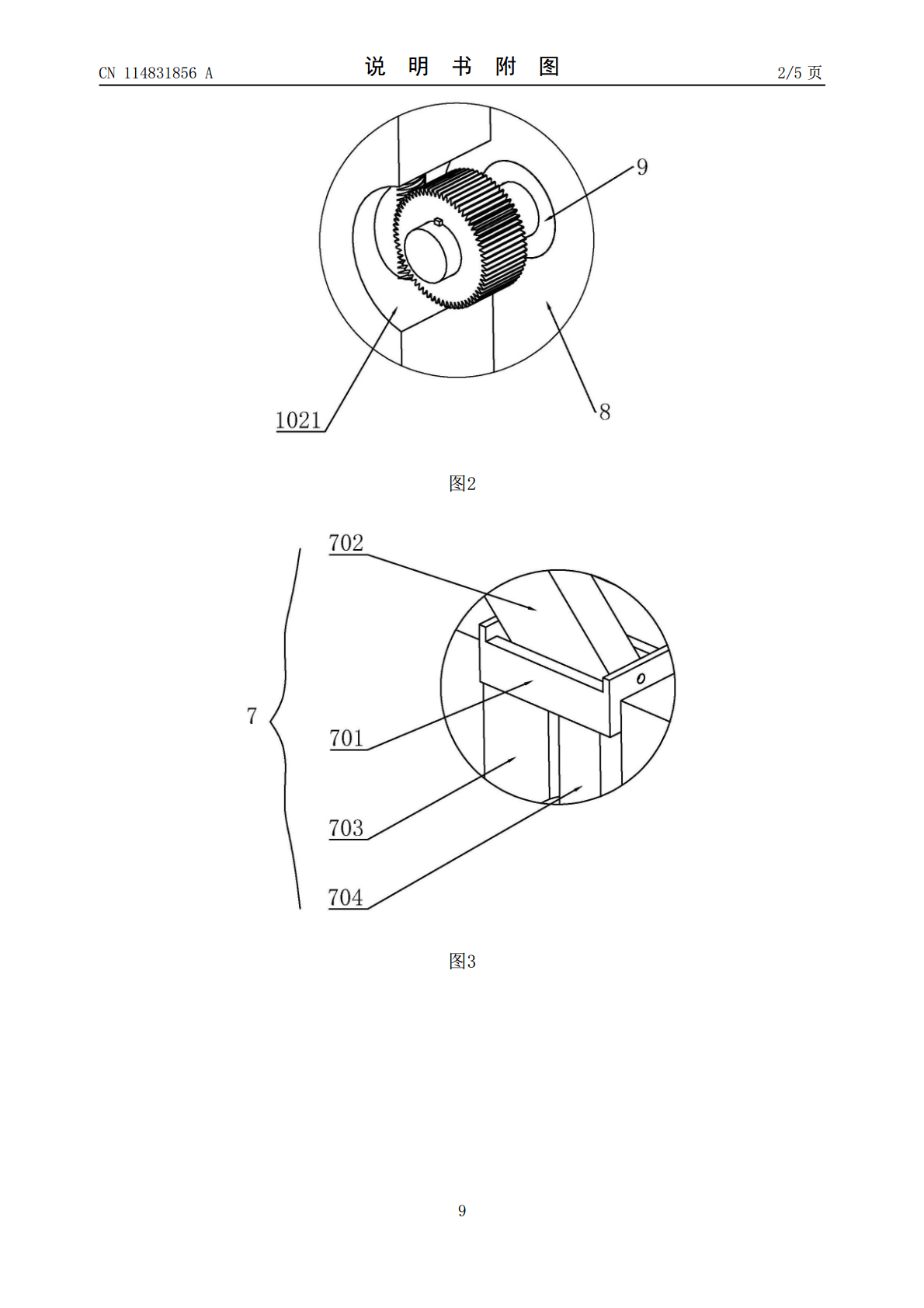
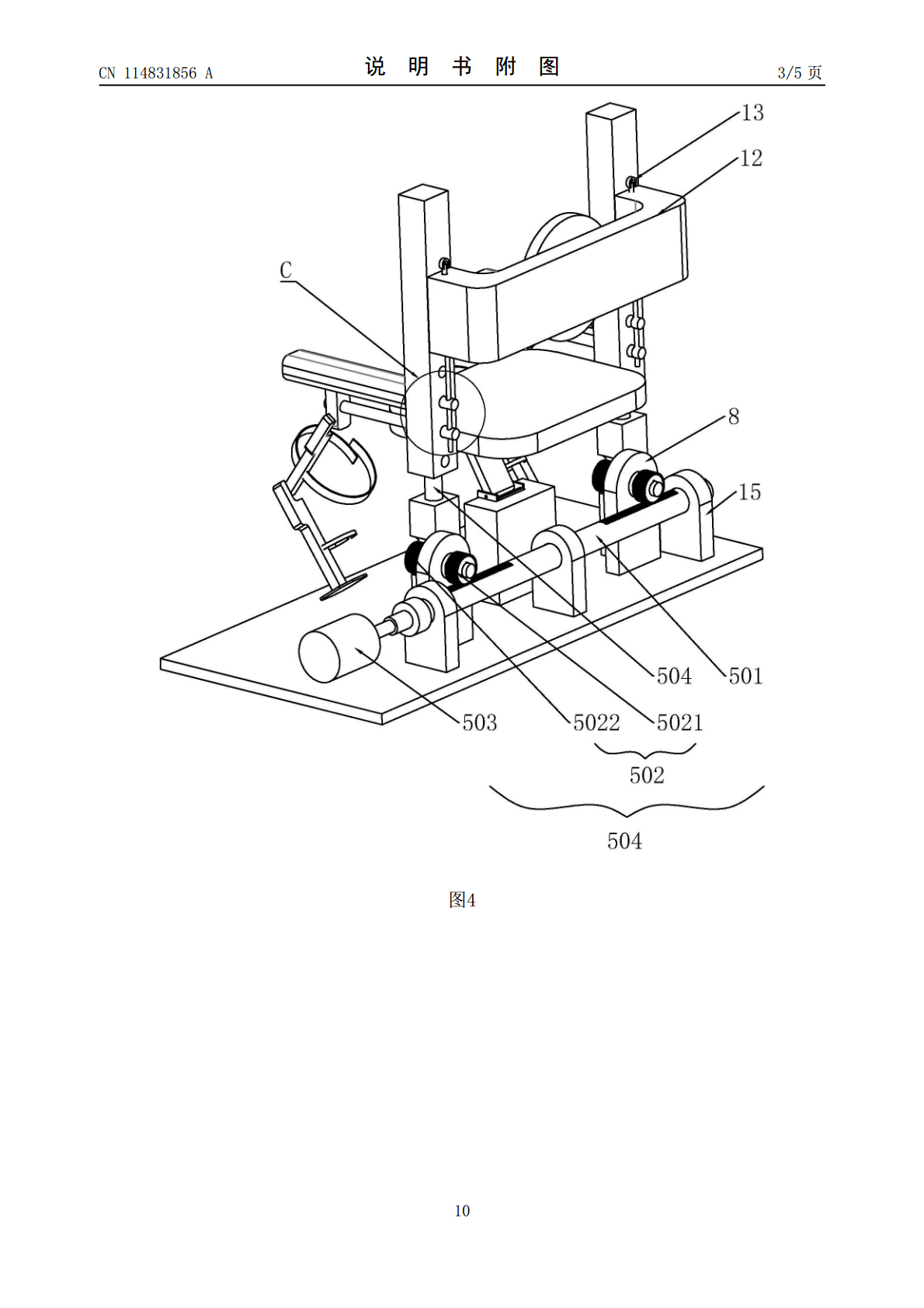
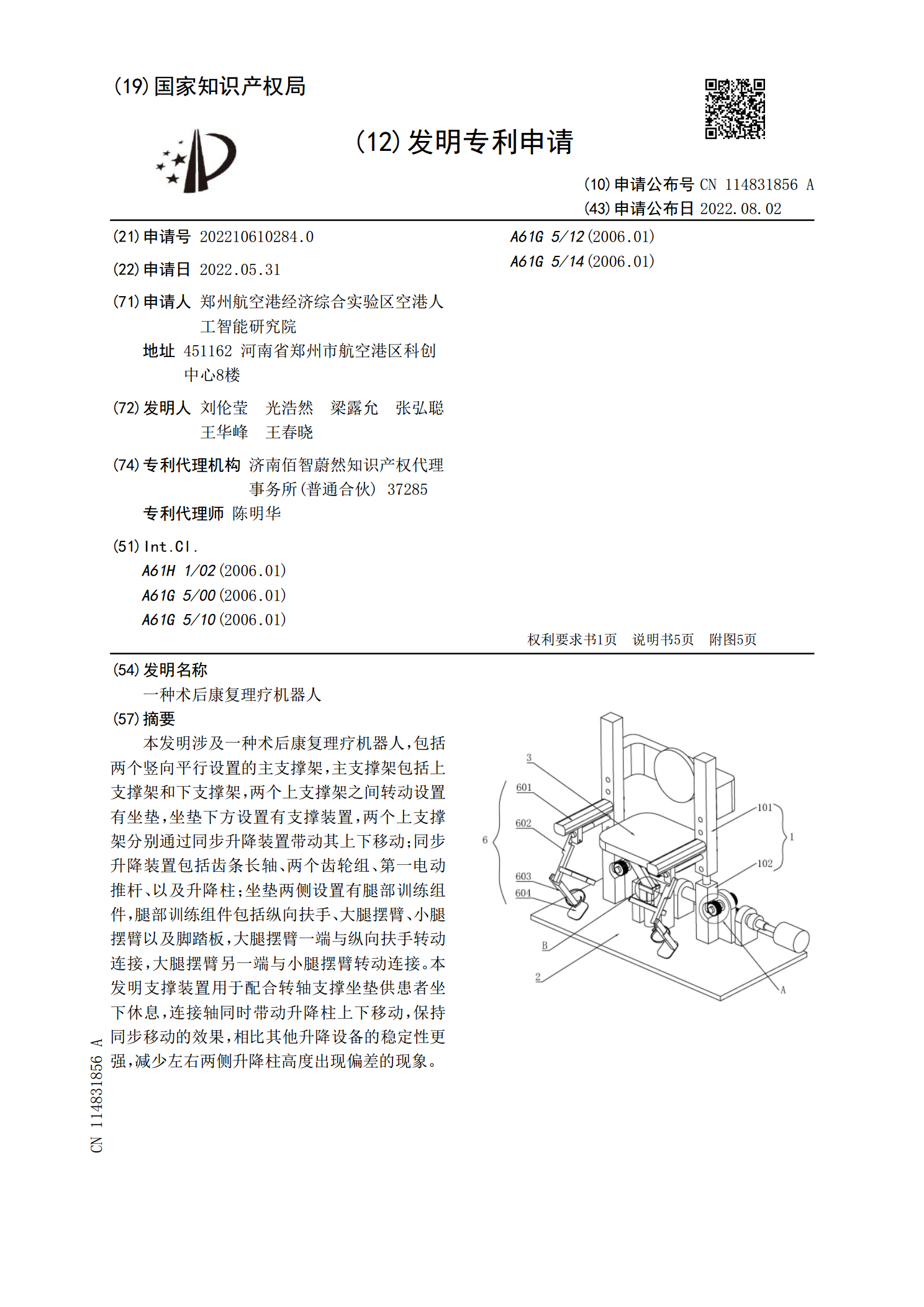
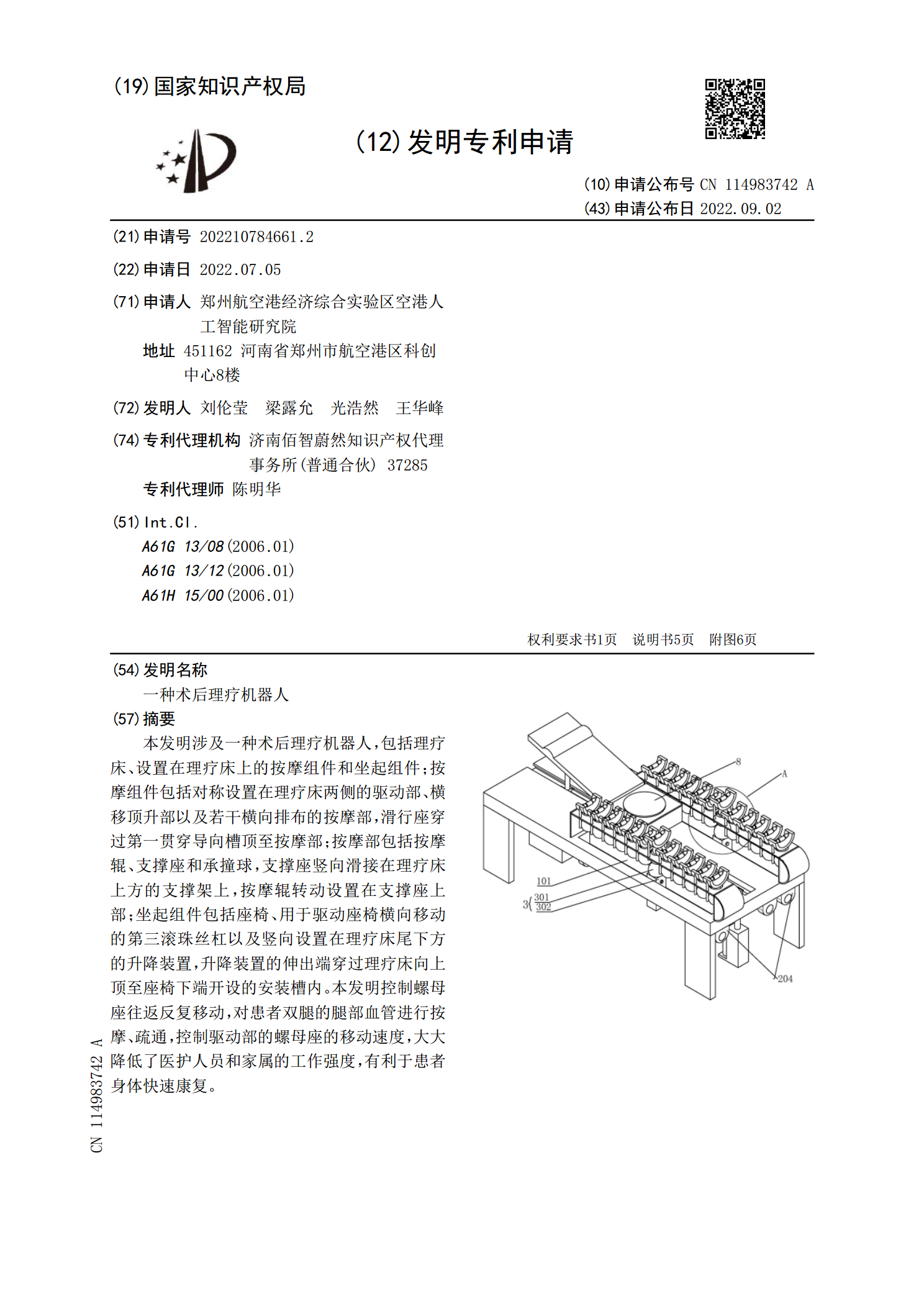
本发明涉及一种术后康复理疗机器人,包括两个竖向平行设置的主支撑架,主支撑架包括上支撑架和下支撑架,两个上支撑架之间转动设置有坐垫,坐垫下方设置有支撑装置,两个上支撑架分别通过同步升降装置带动其上下移动;同步升降装置包括齿条长轴、两个齿轮组、第一电动推杆、以及升降柱;坐垫两侧设置有腿部训练组件,腿部训练组件包括纵向扶手、大腿摆臂、小腿摆臂以及脚踏板,大腿摆臂一端与纵向扶手转动连接,大腿摆臂另一端与小腿摆臂转动连接。本发明支撑装置用于配合转轴支撑坐垫供患者坐下休息,连接轴同时带动升降柱上下移动,保持同步移动的
一种术后理疗机器人.pdf
本发明涉及一种术后理疗机器人,包括理疗床、设置在理疗床上的按摩组件和坐起组件;按摩组件包括对称设置在理疗床两侧的驱动部、横移顶升部以及若干横向排布的按摩部,滑行座穿过第一贯穿导向槽顶至按摩部;按摩部包括按摩辊、支撑座和承撞球,支撑座竖向滑接在理疗床上方的支撑架上,按摩辊转动设置在支撑座上部;坐起组件包括座椅、用于驱动座椅横向移动的第三滚珠丝杠以及竖向设置在理疗床尾下方的升降装置,升降装置的伸出端穿过理疗床向上顶至座椅下端开设的安装槽内。本发明控制螺母座往返反复移动,对患者双腿的腿部血管进行按摩、疏通,控制
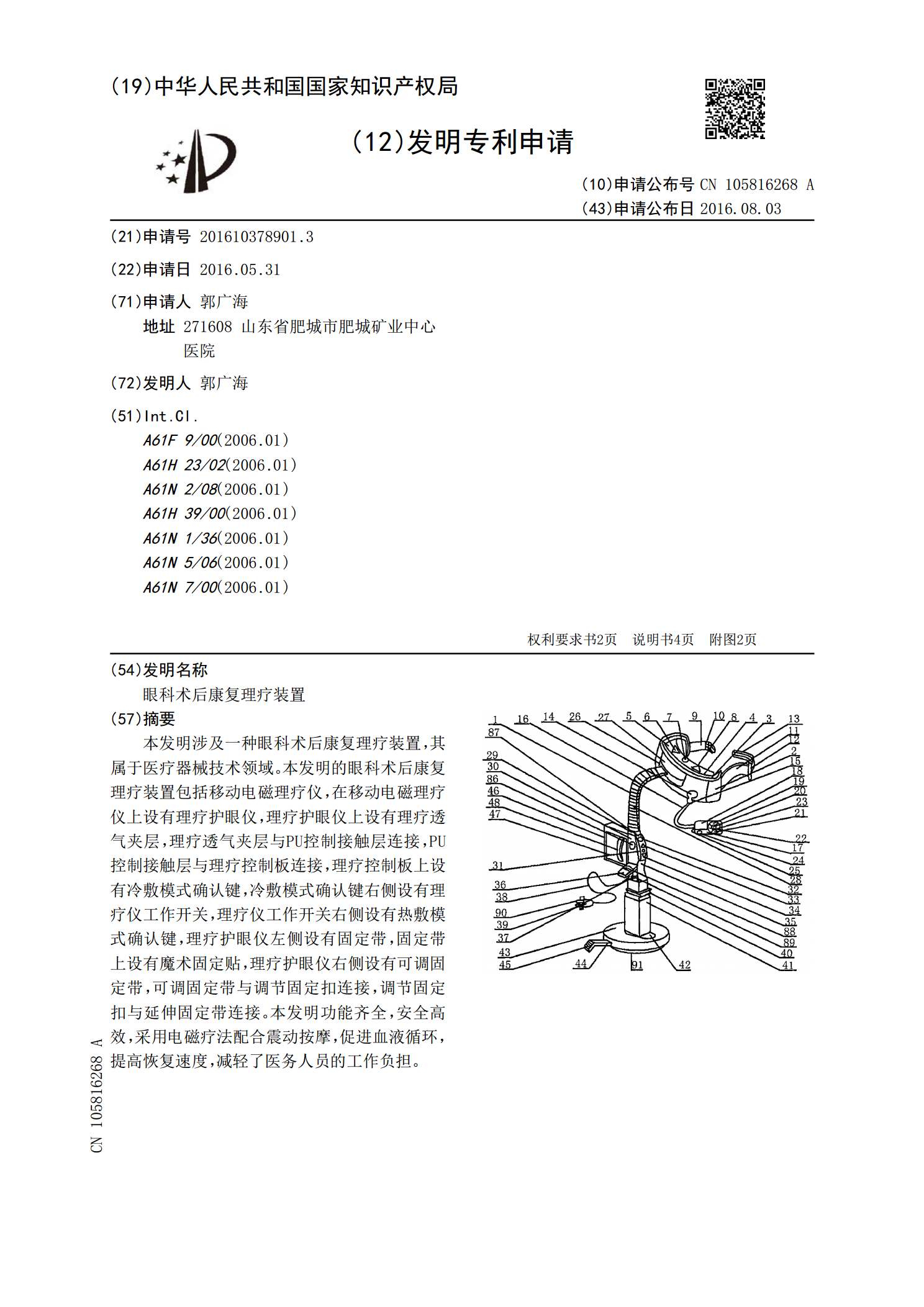
眼科术后康复理疗装置.pdf
本发明涉及一种眼科术后康复理疗装置,其属于医疗器械技术领域。本发明的眼科术后康复理疗装置包括移动电磁理疗仪,在移动电磁理疗仪上设有理疗护眼仪,理疗护眼仪上设有理疗透气夹层,理疗透气夹层与PU控制接触层连接,PU控制接触层与理疗控制板连接,理疗控制板上设有冷敷模式确认键,冷敷模式确认键右侧设有理疗仪工作开关,理疗仪工作开关右侧设有热敷模式确认键,理疗护眼仪左侧设有固定带,固定带上设有魔术固定贴,理疗护眼仪右侧设有可调固定带,可调固定带与调节固定扣连接,调节固定扣与延伸固定带连接。本发明功能齐全,安全高效,采

一种手腕术后康复用理疗装置.pdf
本发明公开了一种手腕术后康复用理疗装置,包括外壳体,所述外壳体的上表面安装有显示屏,且外壳体上表面设置有控制伺服电机和加热装置的控制装置,所述外壳体的前侧面预留有伸入孔,且外壳体的内部固定连接有支撑环,所述支撑环的内侧轴承连接有转动环,且支撑环之间固定连接有固定环。该手腕术后康复用理疗装置能便于带动万向球绕患者手腕转动,且通过万向球与患者手腕的接触能使得万向球自转,并且能使得万向球振动,从而能便于对患者的手腕处进行按摩,有利于促进患者手腕处的血液循环,同时输气管道上的喷孔能向患者的手腕处喷热空气,从而能进
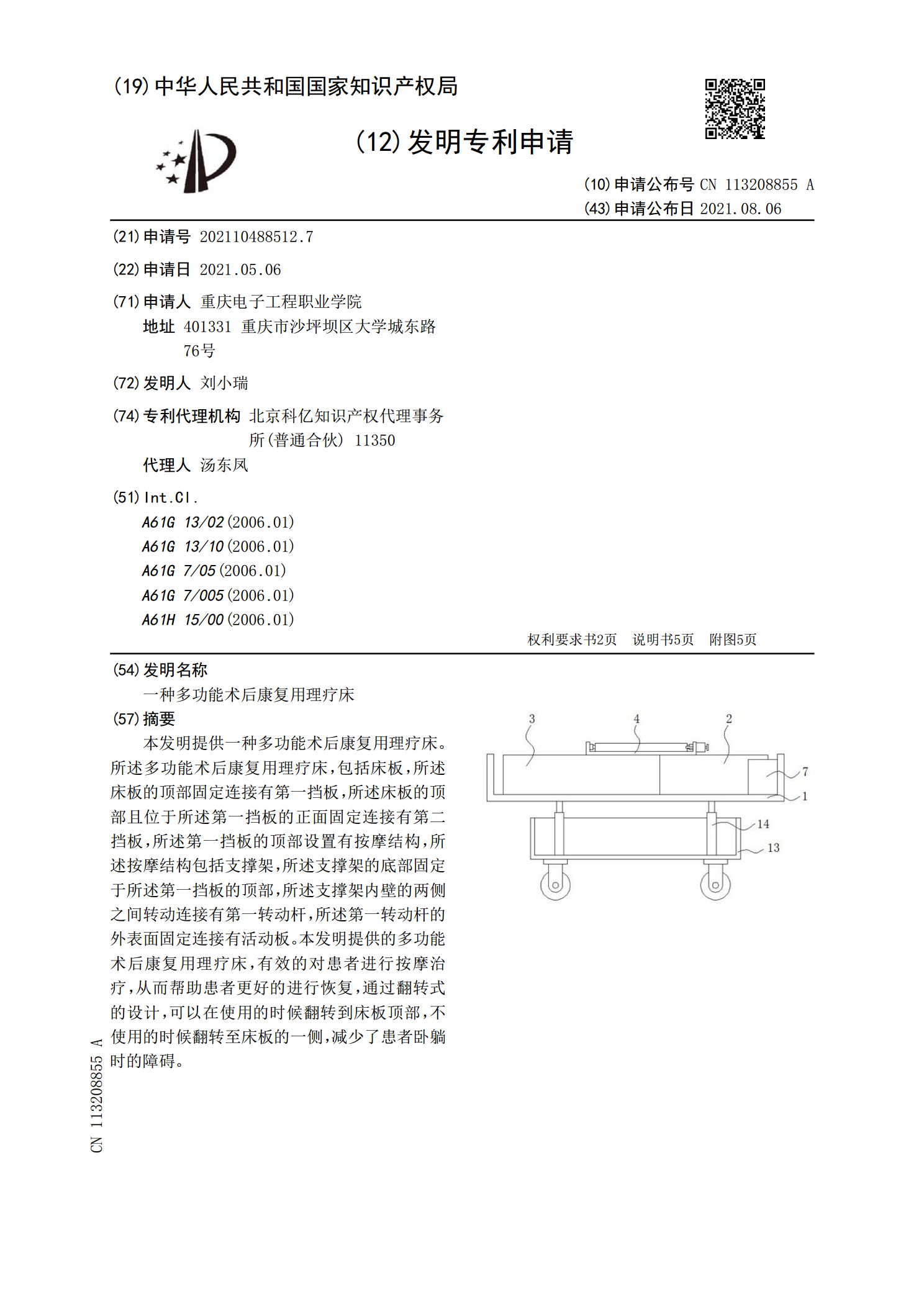
一种多功能术后康复用理疗床.pdf
本发明提供一种多功能术后康复用理疗床。所述多功能术后康复用理疗床,包括床板,所述床板的顶部固定连接有第一挡板,所述床板的顶部且位于所述第一挡板的正面固定连接有第二挡板,所述第一挡板的顶部设置有按摩结构,所述按摩结构包括支撑架,所述支撑架的底部固定于所述第一挡板的顶部,所述支撑架内壁的两侧之间转动连接有第一转动杆,所述第一转动杆的外表面固定连接有活动板。本发明提供的多功能术后康复用理疗床,有效的对患者进行按摩治疗,从而帮助患者更好的进行恢复,通过翻转式的设计,可以在使用的时候翻转到床板顶部,不使用的时候翻转