
一种复杂异型工件自动焊接轨迹生成系统及方法.pdf

书生****写意

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种复杂异型工件自动焊接轨迹生成系统及方法.pdf
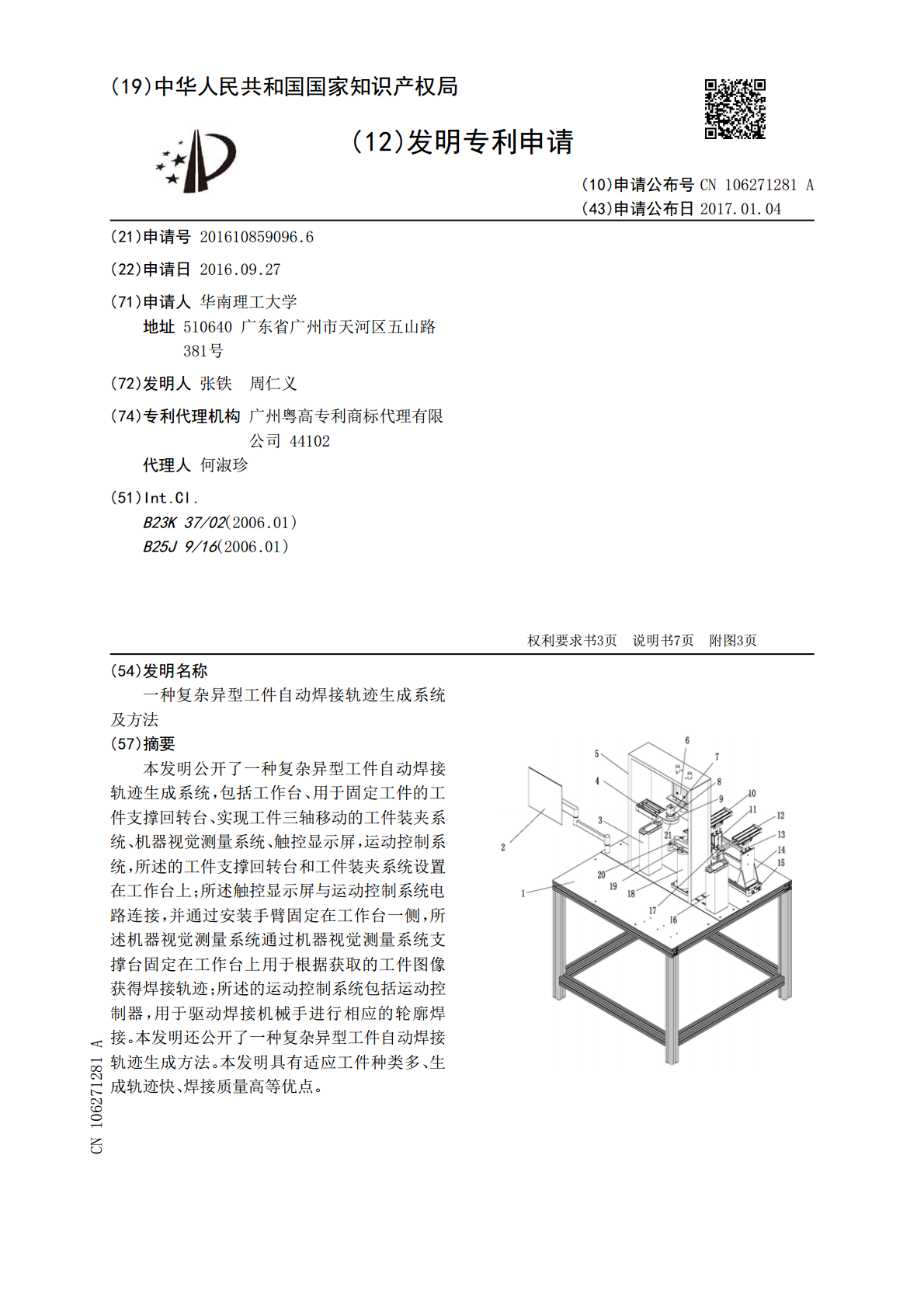
本发明公开了一种复杂异型工件自动焊接轨迹生成系统,包括工作台、用于固定工件的工件支撑回转台、实现工件三轴移动的工件装夹系统、机器视觉测量系统、触控显示屏,运动控制系统,所述的工件支撑回转台和工件装夹系统设置在工作台上;所述触控显示屏与运动控制系统电路连接,并通过安装手臂固定在工作台一侧,所述机器视觉测量系统通过机器视觉测量系统支撑台固定在工作台上用于根据获取的工件图像获得焊接轨迹;所述的运动控制系统包括运动控制器,用于驱动焊接机械手进行相应的轮廓焊接。本发明还公开了一种复杂异型工件自动焊接轨迹生成方法。本

一种复杂异型工件自动焊接系统及方法.pdf
本发明公开了一种复杂异型工件的自动焊接系统,包括底座、设置在所述底座上的工件装夹系统、焊接执行系统、主控制系统及触摸屏,所述的工件装夹系统包括气缸支架、竖直设置在所述气缸支架上的下压气缸、连接下压气缸的推拉板、通过推力轴承转动设置在推拉板底部的第二夹具;所述的焊接执行系统包括回转机构、十字滑台机构,用于带动焊枪和工件进行相应的插补运动,完成轮廓焊接;所述主控制系统与回转机构及十字滑台机构电路连接,用于根据工件形状,进行插补计算,并发送运动脉冲至所述的焊接执行系统。本发明还提供了一种复杂异型工件的自动焊接方

一种面向复杂曲面加工的轨迹生成方法及其轨迹生成系统.pdf
本发明公开了一种面向复杂曲面加工的轨迹生成方法及其轨迹生成系统,该方法是:选择所要加工的复杂曲面并生成STL文件;确定分层方向和分层厚度;对三角面片进行分组;通过增量法求取交点;找出每个切片交点集合中在垂直于分层方向上的坐标最小值点,搜索同一个三角面片的另外一个交点并连接,如此下去,直到得到每个切平面的轮廓,并最终得到加工路径轨迹。该系统包括工业PC机、运动控制器、伺服驱动器和工业机器人本体,工业PC机将三维待加工零件生成离散的控制点集后传递到运动控制器,运动控制器对其进行插补计算,输出脉冲串到伺服驱动器
一种机器人焊接轨迹自动生成方法.pdf
本发明公开了一种机器人焊接轨迹自动生成方法,用于机器人自动焊接系统,包括以下步骤:1)建立焊缝基本轨迹库;2)生成所有焊缝的截取、旋转、比例变换和平移变换的变换参数;3)依据其类型选择对应的基本轨迹,依据变换参数进行变换,生成新的焊缝轨迹;4)选择另一条焊缝,使用S3中的方法进行变换,可以得到新的轨迹点集;该方法适用于工件焊缝数量多而种类少的情形,操作简单,提高了机器人焊接效率;使得操作应用较为便捷;支持多种类型焊缝,通用性比较好。
一种基于视觉传感的复杂异型结构远程激光焊接方法.pdf
本发明公开了一种基于视觉传感的复杂异型结构远程激光焊接方法,针对异型结构焊接过程中存在的机器人干涉的问题,采用远程激光焊接技术,实现了无空间障碍下的焊接。所述远程焊接方法包括设计激光扫描路径,制定合理激光焊接工艺,实时监控焊接过程,及时优化聚焦位置,最终实现复杂异型结构的焊接。特别地,所述远程激光焊接指有效焊接距离可达450mm;所述激光扫描路径为摆动焊接路径,具体包括V形路径、圆弧形路径;所述实时监控过程为基于视觉传感器的焊缝自动追踪。本发明面向传统焊接头无法深入的盲区及难焊接区域提供了一种远程焊接方法