
一种可拆卸式工业机器人力矩平衡装置及其安装方法.pdf

山柳****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可拆卸式工业机器人力矩平衡装置及其安装方法.pdf
本发明公开一种可拆卸式工业机器人力矩平衡装置及其安装方法,包括壳体和壳盖,所述壳体内的四个拐角处均设有定位柱,所述壳体内设有圆柱齿轮、与圆柱齿轮啮合的一对齿条、双螺旋弹簧储能器以及输入转轴,所述壳体底部被输入转轴贯穿至圆柱齿轮内孔处,所述的一对齿条对称分布在圆柱齿轮的两侧,任一个所述齿条的两侧均设有对称分布的双螺旋弹簧储能器,所述双螺旋弹簧储能器的一端固接在齿条上,另一端固接在定位柱上;本力矩平衡装置结构巧妙,易于安装与拆卸,成本较低,便于量产,可应用于各种串联工业机器人机械臂的输出关节的部位,能够有效减
一种机器人关节力矩平衡装置.pdf
本发明公开了一种机器人关节力矩平衡装置,包括偏心凸轮,所述偏心凸轮的中轴与RV减速机的输出端固定连接,机器人手臂固定在偏心凸轮上;多个平衡油缸,多个所述平衡油缸以偏心凸轮的对称轴线为轴对称的布置在偏心凸轮的两侧,平衡油缸的活动端抵靠在偏心凸轮的外轮廓上;液压油泵,所述液压油泵通过输油管路与多个所述平衡油缸相连接,用于驱动所述平衡油缸动作;角度编码器,用于检测所述偏心凸轮或者机器人手臂的角度信号;PLC,用于接收所述角度编码器发送的角度信号,并控制所述液压油泵动作。本发明的效果是:结构紧凑,占用空间小,平衡
一种可拆卸式木窗结构及其安装方法.pdf
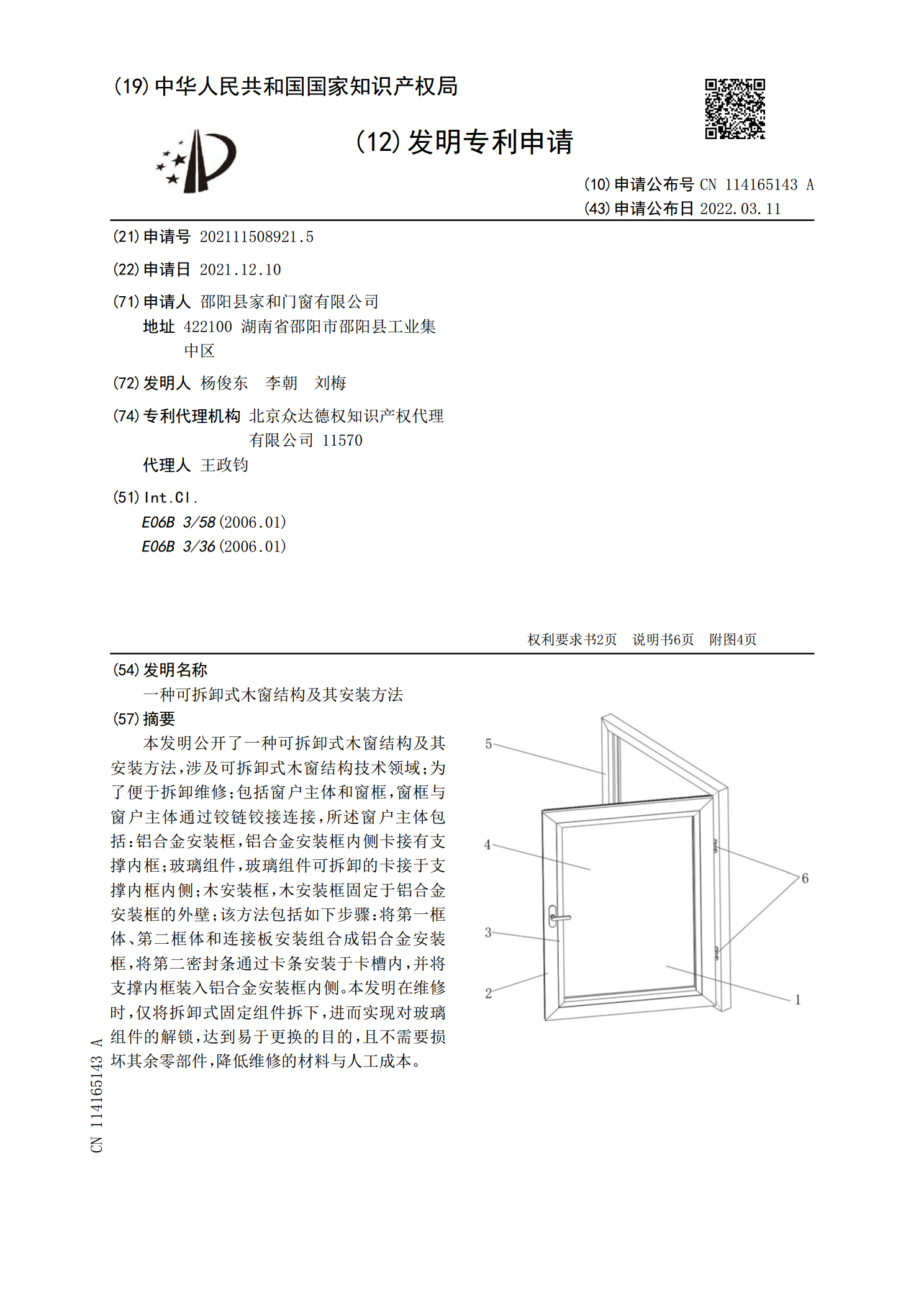
本发明公开了一种可拆卸式木窗结构及其安装方法,涉及可拆卸式木窗结构技术领域;为了便于拆卸维修;包括窗户主体和窗框,窗框与窗户主体通过铰链铰接连接,所述窗户主体包括:铝合金安装框,铝合金安装框内侧卡接有支撑内框;玻璃组件,玻璃组件可拆卸的卡接于支撑内框内侧;木安装框,木安装框固定于铝合金安装框的外壁;该方法包括如下步骤:将第一框体、第二框体和连接板安装组合成铝合金安装框,将第二密封条通过卡条安装于卡槽内,并将支撑内框装入铝合金安装框内侧。本发明在维修时,仅将拆卸式固定组件拆下,进而实现对玻璃组件的解锁,达到

一种可拆卸式预制立柱钢筋定位装置及其安装方法.pdf
本发明公开了一种可拆卸式预制立柱钢筋定位装置及其安装的方法,为解决装配式立柱拼装时上下钢筋易偏移的技术难题而设计。该装置包括四周沿壁侧围成的钢筋定位框架、定位条、可拆卸套筒和轴销。所述的钢筋定位框架由加工成型的钢板和带有凹槽形的钢板组成;其要点在于钢板嵌入两端带有凹槽形的钢板中,同时用轴销将钢板和带有凹槽形的钢板固定;所述钢板和带有凹槽形的钢板设有用于钢筋定位的开口状圆孔和轴销孔,其中一块设避雷扁铁预留孔;其要点在于所述套筒嵌入开口状圆孔内,紧固穿插在开口状圆孔内的钢筋;在钢板上侧设有带有磁性的定位条,起

一种工业机器人的平衡装置.pdf
本发明涉及一种工业机器人的平衡装置,所述平衡装置设置于机器人的大臂和大臂驱动电机之间并与下方的转盘固定连接,所述平衡装置与大臂之间刚性连接;所述平衡装置由支架、丝杠、连接板和电机组成,电机驱动丝杠,丝杠与连接板螺纹连接,连接板与大臂相连,支架的下方与转盘固定连接;所述支架内固定设置有直线导轨,连接板与直线导轨滑动连接;所述丝杠和电机通过设置锥齿轮啮合传动,所述丝杠的两端通过滚动轴承固定在支架上。这种平衡装置能够实时主动平衡,不产生阻碍的反作用,并且能够延长电机、减速器的使用寿命。