
变电站巡检机器人定位方法及定位装置.pdf

fu****级甜

1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
变电站巡检机器人定位方法及定位装置.pdf
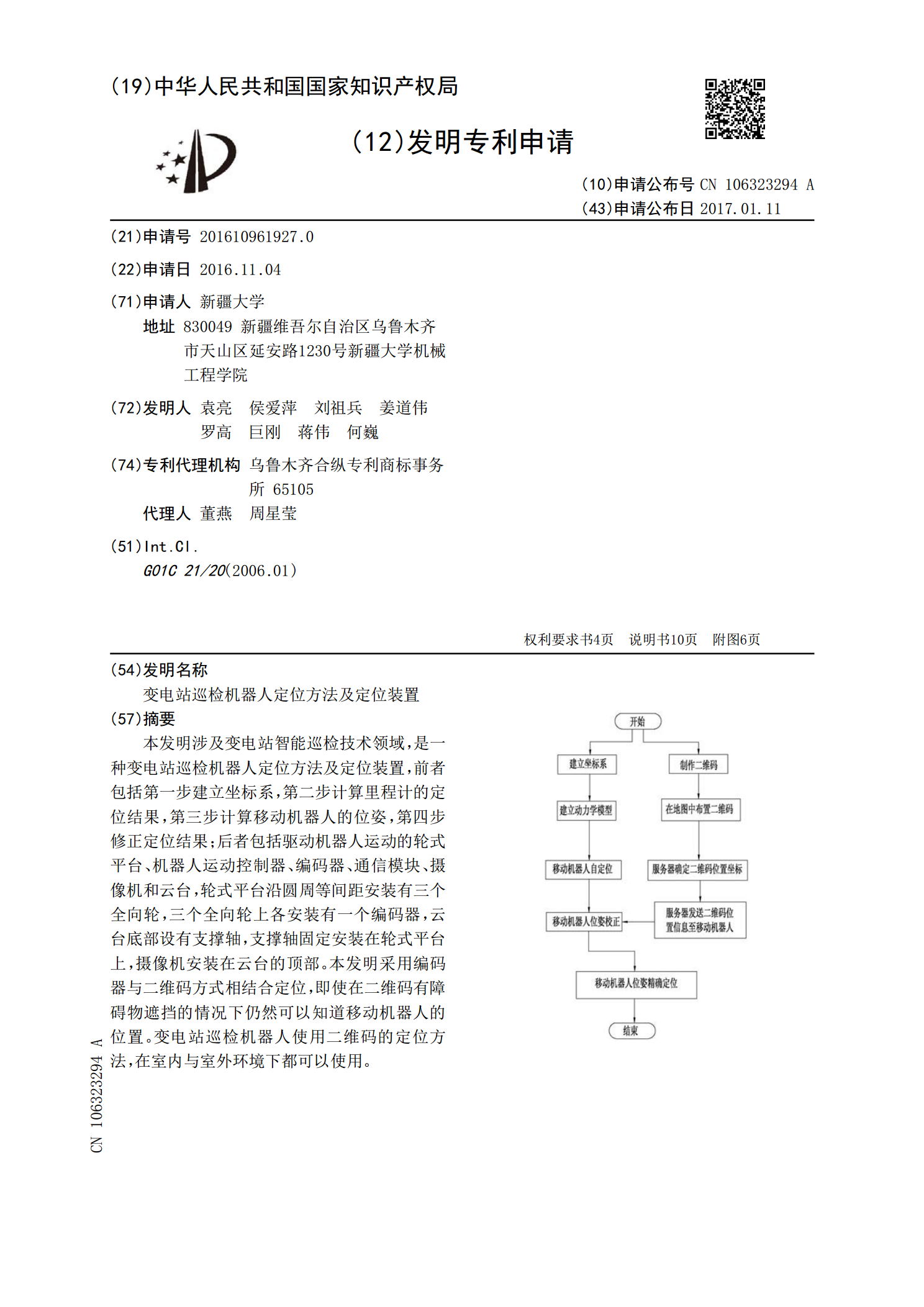
本发明涉及变电站智能巡检技术领域,是一种变电站巡检机器人定位方法及定位装置,前者包括第一步建立坐标系,第二步计算里程计的定位结果,第三步计算移动机器人的位姿,第四步修正定位结果;后者包括驱动机器人运动的轮式平台、机器人运动控制器、编码器、通信模块、摄像机和云台,轮式平台沿圆周等间距安装有三个全向轮,三个全向轮上各安装有一个编码器,云台底部设有支撑轴,支撑轴固定安装在轮式平台上,摄像机安装在云台的顶部。本发明采用编码器与二维码方式相结合定位,即使在二维码有障碍物遮挡的情况下仍然可以知道移动机器人的位置。变电

变电站巡检机器人的仪表定位方法.pdf
本发明提供的一种变电站巡检机器人的仪表定位方法,包括预备阶段和正式巡检阶段,预备阶段为:变电站巡检机器人采集仪表图像作为模板图,人工标定出各模板图中仪表的位置信息,利用各模板图分别训练相关滤波器;正式巡检阶段为:读取巡检图像,对巡检图像提取HOG特征,利用相关滤波器计算出响应地图,得到仪表位置。利用相关滤波器来进行仪表定位,相关滤波器是利用整个目标区域图像进行计算,从而对空间信息利用较为充分,对于仪表定位问题,仪表不存在明显形状、尺度和旋转变化,且HOG对图像的空间结构信息保留较好。与SURF、SIFT等
变电站智能巡检机器人环境地图激光定位导航装置及方法.pdf
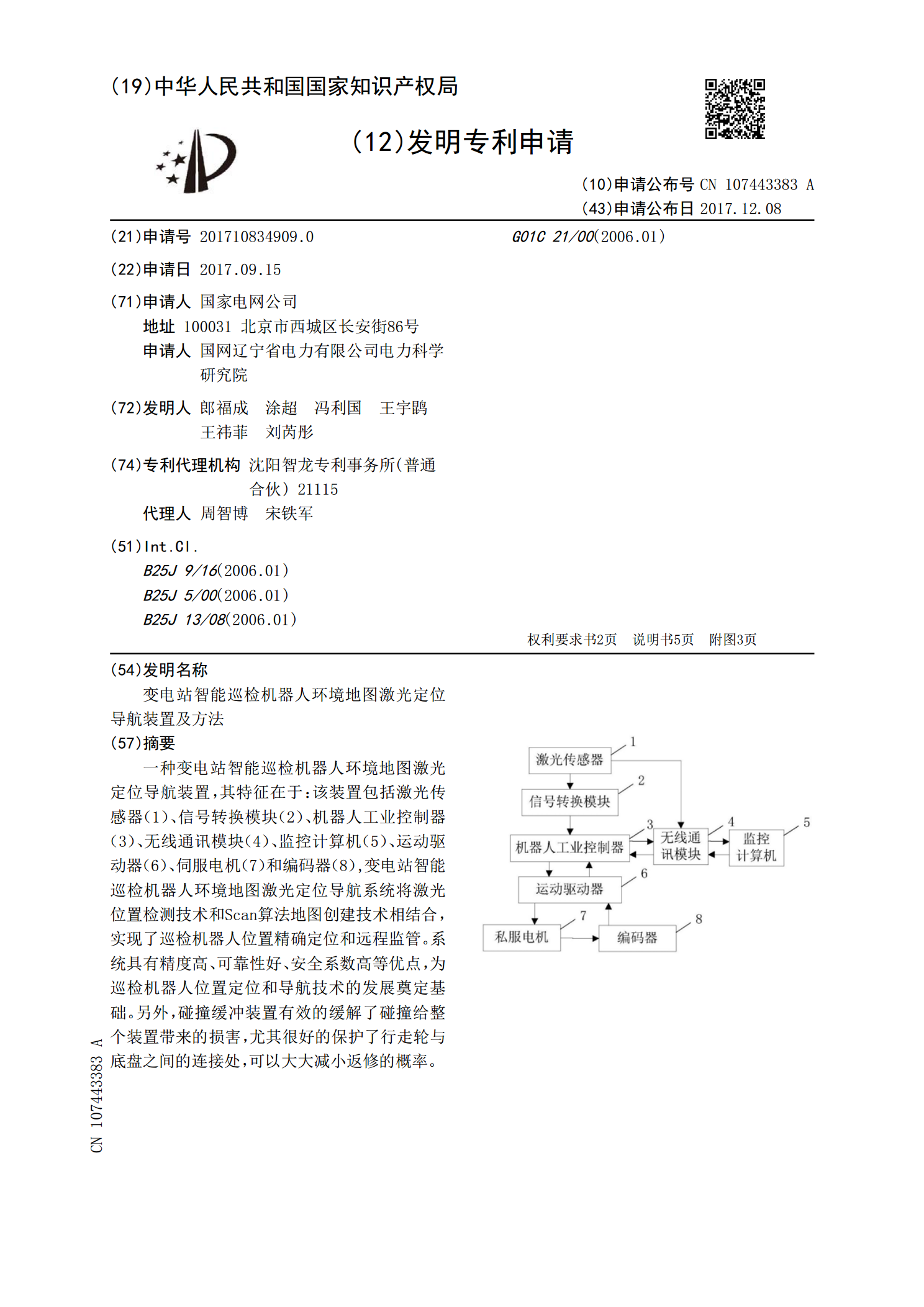
一种变电站智能巡检机器人环境地图激光定位导航装置,其特征在于:该装置包括激光传感器(1)、信号转换模块(2)、机器人工业控制器(3)、无线通讯模块(4)、监控计算机(5)、运动驱动器(6)、伺服电机(7)和编码器(8),变电站智能巡检机器人环境地图激光定位导航系统将激光位置检测技术和Scan算法地图创建技术相结合,实现了巡检机器人位置精确定位和远程监管。系统具有精度高、可靠性好、安全系数高等优点,为巡检机器人位置定位和导航技术的发展奠定基础。另外,碰撞缓冲装置有效的缓解了碰撞给整个装置带来的损害,尤其很好

变电站巡检机器人重定位研究.docx
变电站巡检机器人重定位研究标题:变电站巡检机器人重定位研究摘要:随着智能化技术的发展,变电站巡检机器人逐渐被应用于电力行业,以提高变电站的安全性和运行效率。然而,巡检机器人在长时间运行后容易出现累积误差,并可能导致重定位失效。本论文针对此问题,通过对变电站巡检机器人的重定位进行研究,旨在提出有效的解决方案,以确保机器人能够准确定位并继续正常运行。第一章引言1.1研究背景1.2研究意义1.3确定研究目标第二章变电站巡检机器人概述2.1变电站巡检机器人的发展历程2.2变电站巡检机器人的构成和工作原理2.3变电

变电站巡检机器人自主定位方法研究的任务书.docx
变电站巡检机器人自主定位方法研究的任务书任务书一、项目背景与意义变电站是电网的重要组成部分,它从高压输电线路输送电能,通过变压器变换电压等参数,将电能传递到低压配电系统中,保证了电力的正常供应。而变电站的正常运行离不开巡检的及时、准确和全面。传统的巡检方式往往需要人工操作,耗时耗力,而随着技术的不断发展,机器人的应用越来越广泛,改变了工业和服务业的运营方式,为变电站巡检提供了更加有效和可靠的方法,极大地提高了生产和服务效率。巡检机器人将完全取代传统的人工巡检方式,通过机器视觉技术进行自主导航、环境感知、数