
一种线路机器人越过防震锤的无障碍通道.pdf

努力****冰心


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种线路机器人越过防震锤的无障碍通道.pdf
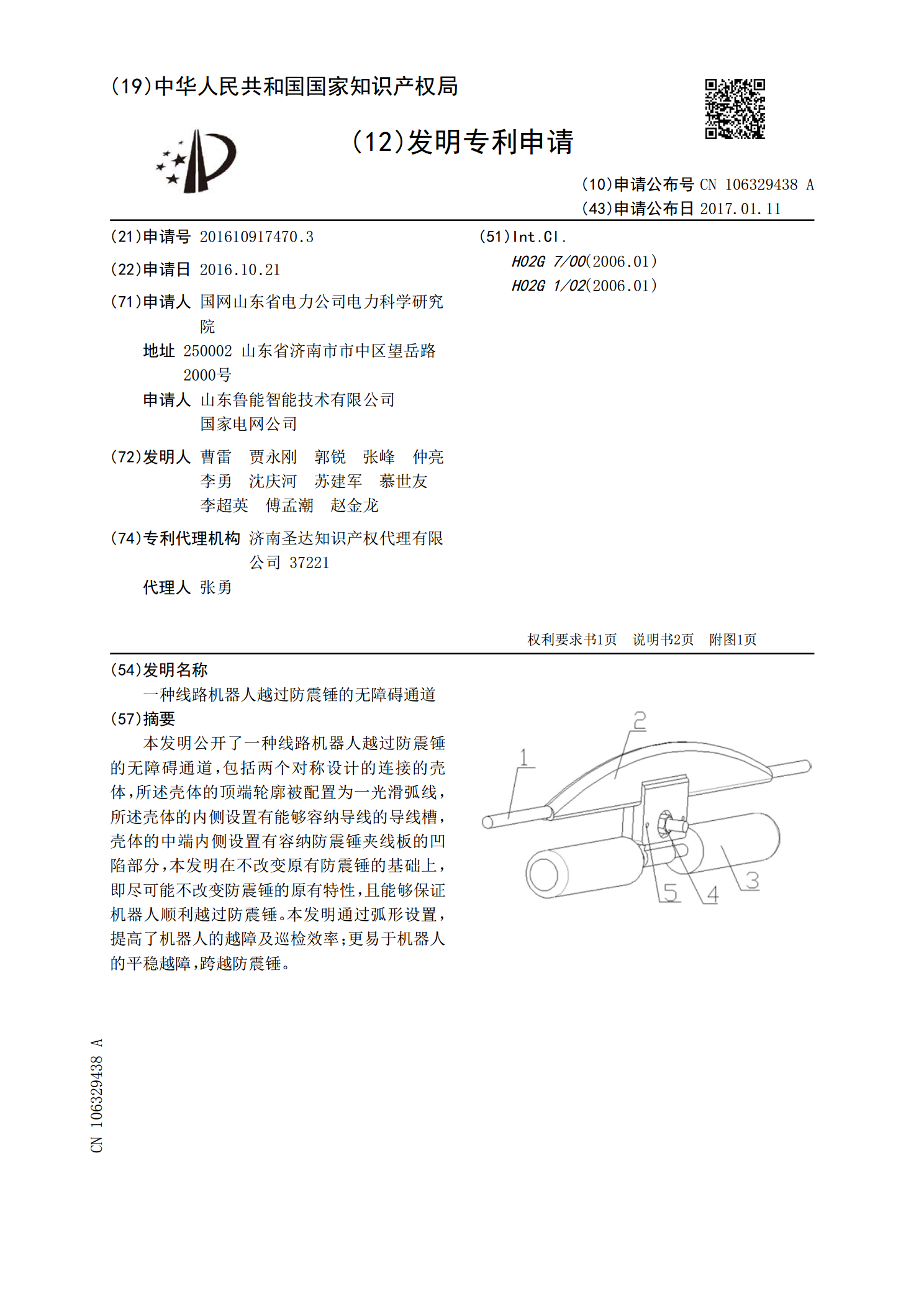
本发明公开了一种线路机器人越过防震锤的无障碍通道,包括两个对称设计的连接的壳体,所述壳体的顶端轮廓被配置为一光滑弧线,所述壳体的内侧设置有能够容纳导线的导线槽,壳体的中端内侧设置有容纳防震锤夹线板的凹陷部分,本发明在不改变原有防震锤的基础上,即尽可能不改变防震锤的原有特性,且能够保证机器人顺利越过防震锤。本发明通过弧形设置,提高了机器人的越障及巡检效率;更易于机器人的平稳越障,跨越防震锤。
架空地线巡线机器人跨越直线杆及防震锤的无障碍通道.pdf
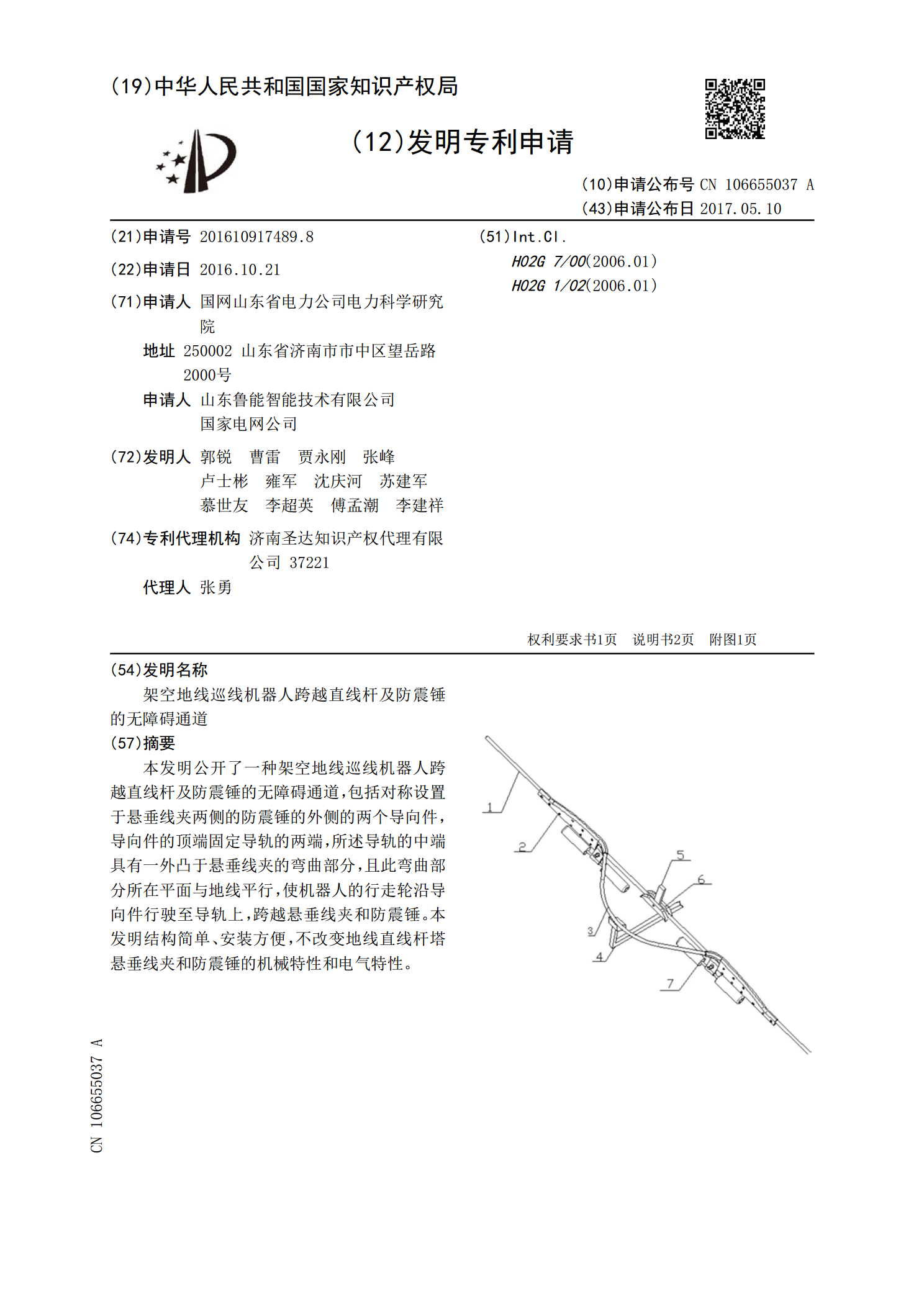
本发明公开了一种架空地线巡线机器人跨越直线杆及防震锤的无障碍通道,包括对称设置于悬垂线夹两侧的防震锤的外侧的两个导向件,导向件的顶端固定导轨的两端,所述导轨的中端具有一外凸于悬垂线夹的弯曲部分,且此弯曲部分所在平面与地线平行,使机器人的行走轮沿导向件行驶至导轨上,跨越悬垂线夹和防震锤。本发明结构简单、安装方便,不改变地线直线杆塔悬垂线夹和防震锤的机械特性和电气特性。
一种高压输电线路带电作业机器人及防震锤更换方法.pdf
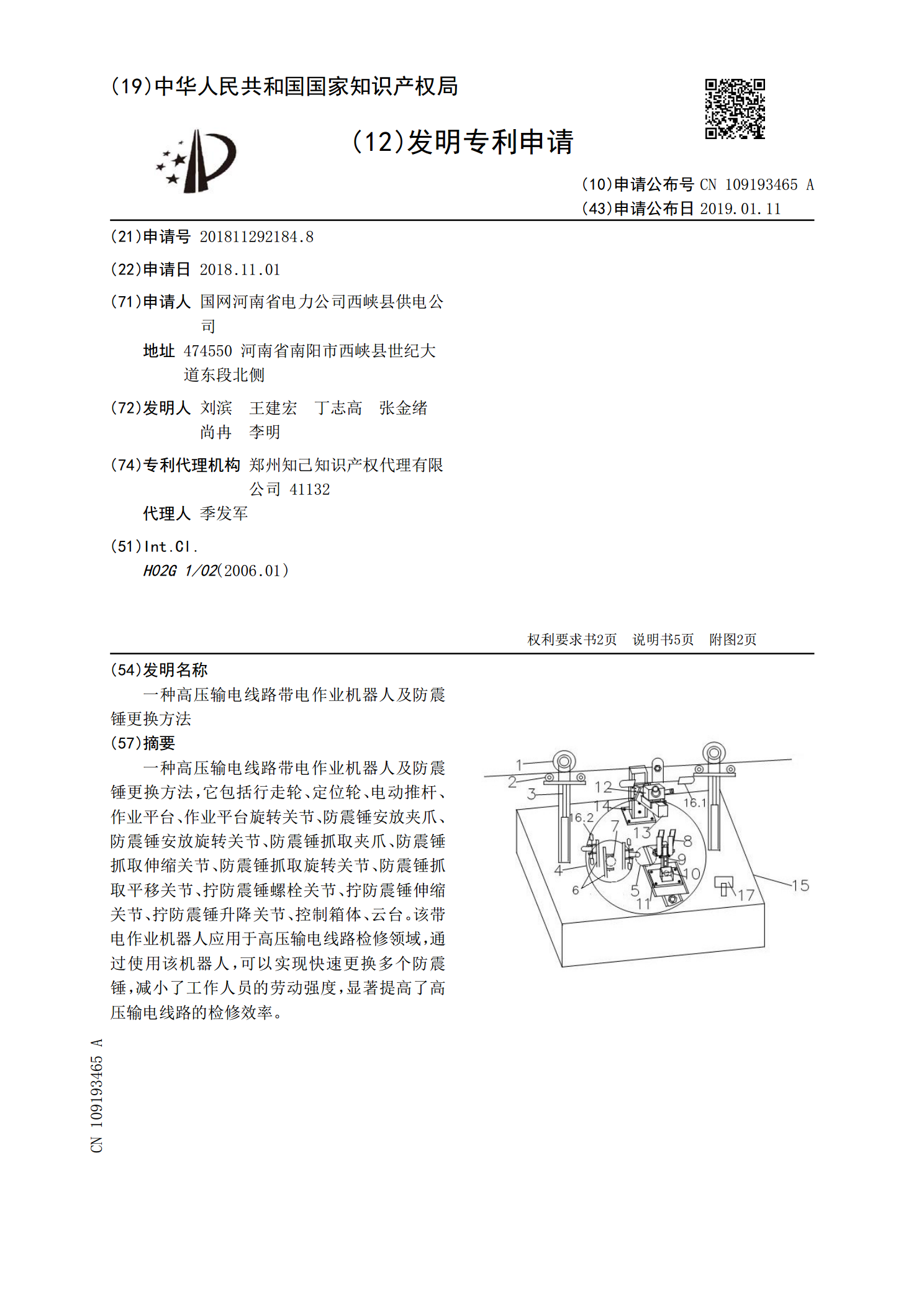
一种高压输电线路带电作业机器人及防震锤更换方法,它包括行走轮、定位轮、电动推杆、作业平台、作业平台旋转关节、防震锤安放夹爪、防震锤安放旋转关节、防震锤抓取夹爪、防震锤抓取伸缩关节、防震锤抓取旋转关节、防震锤抓取平移关节、拧防震锤螺栓关节、拧防震锤伸缩关节、拧防震锤升降关节、控制箱体、云台。该带电作业机器人应用于高压输电线路检修领域,通过使用该机器人,可以实现快速更换多个防震锤,减小了工作人员的劳动强度,显著提高了高压输电线路的检修效率。

一种可调节谐振频率的线路防震锤.pdf
一种可调节谐振频率的线路防震锤,它涉及一种线路防震锤。本发明为了解决目前的防振器仅能匹配几个谐振频率,对于其他多数频率无法起到谐振减振的作用。本发明的护线套套装在导线上,线夹组件安装在护线套上,中间托板通过螺钉与线夹组件的下端连接,下托板安装在中间托板的下端,步进电机通过压板安装在下托板上,步进电机的输出端与螺杆连接,螺杆的两端分别通过第一转动件和第二转动件支撑并可转动连接,蜗轮安装在螺杆上方的下托板上,旋转杆的中部可转动安装在中间托板上,旋转杆两端分别与第一连杆的一端和第二连杆的一端可转动连接,第一连杆

一种架空线路防震锤复位器执行机构.pdf
本发明提供了一种架空线路防震锤复位器执行机构,包括:机构底板,作为整个机构的支撑,下端与防震锤复位器机体连接;水平方向一自由度移动平台,移动平台包括两个相同型号的平行直线滑轨及滑台,滑轨中间设有丝杆驱动部件,其用于实现滑台的水平移动;俯仰调节机构,包括90度转角齿轮箱和一对位于齿轮箱两侧的四连杆机构,齿轮箱用于传递垂直方向来自电机的动力,通过四连杆机构调整工作台的角度实现第二自由度;冲击扳手进给机构,包括一自由度滑台、齿轮齿条传动机构及传感器,沿被旋转螺栓方向进行调整以实现冲击扳手的第三自由度;末端是冲击