
果蔬分级装箱机器人及方法.pdf

宁馨****找我

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
果蔬分级装箱机器人及方法.pdf
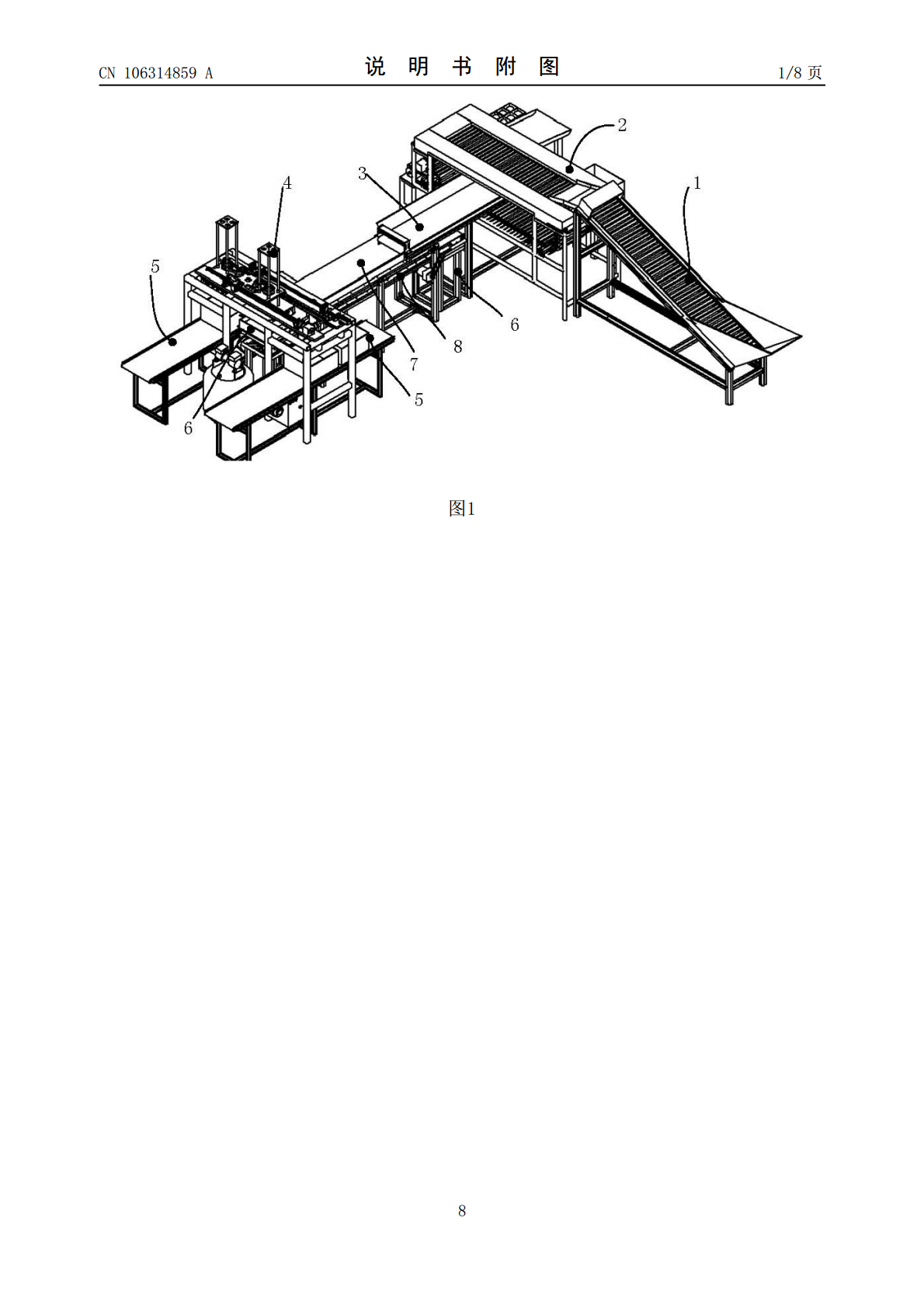
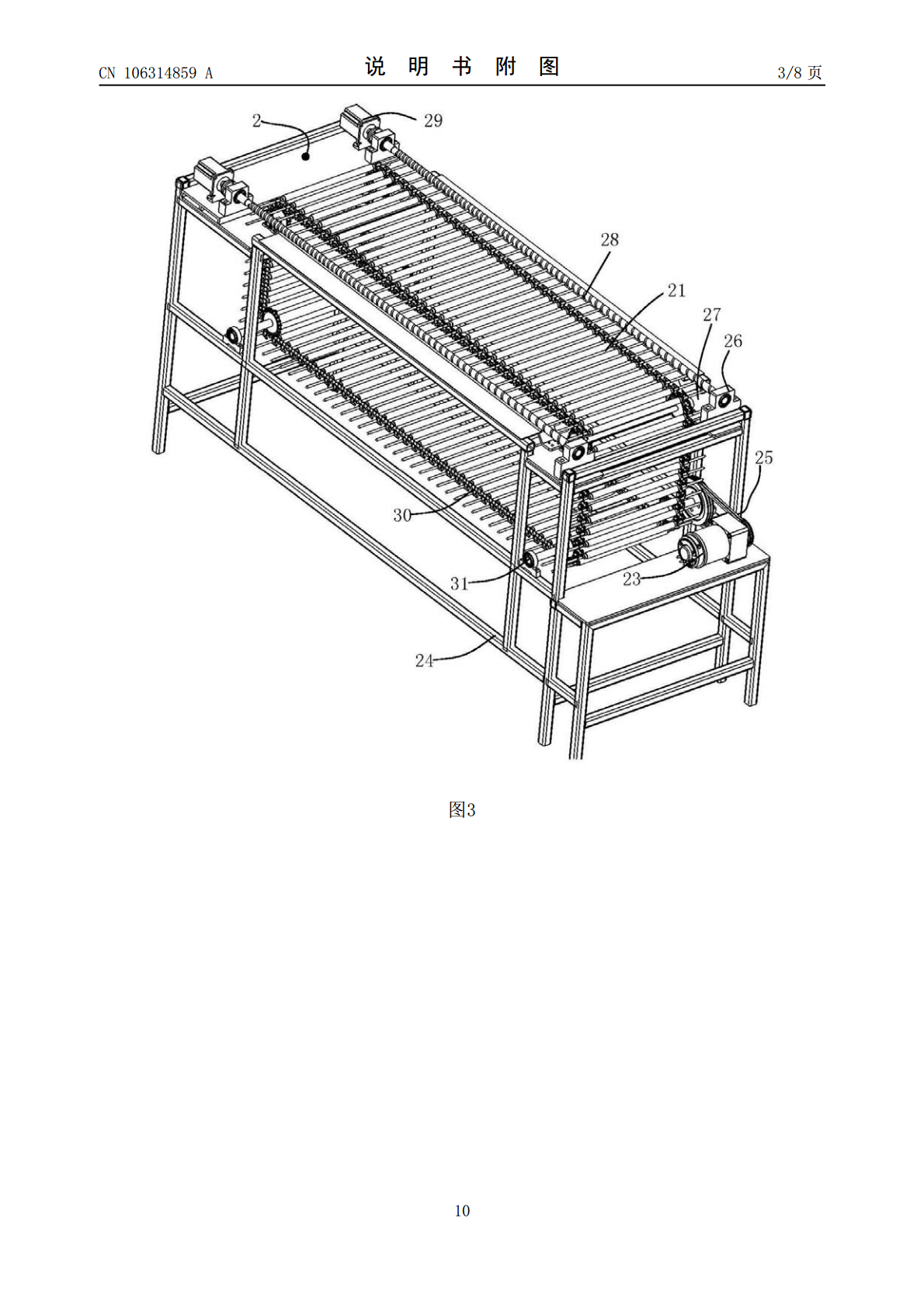
一种果蔬分级装箱机器人系统,包括上料机构、分级机构、果蔬输送带、双臂机械手、箱体传送带、升降式传送带、装箱输送带、果蔬载具输送带组成,主要完成球形果蔬分级与双臂机器人装箱工序;所述的分级机构由限距螺杆通过变螺距导向槽结构实现低级、中级与高级果蔬处理区分区;所述的双臂机械手包括端拾器、电机、转向器、水平丝杠、垂直丝杠、光杆、连接板、同步带轮组件、吸盘等组成,安装在移动座的两个工位上,实现果蔬的自动分层装箱;本发明将球形果蔬上料、分级、分层装箱等多个工序有机结合起来,实现果蔬生产的全自动,有效提高了果蔬分拣装

果蔬分级滚筒筛分机.pdf
本发明提供了果蔬分级滚筒筛分机,它包括机架的顶部一端设置有头部支架,另一端设置有尾部支架,在头部支架和尾部支架之间支撑安装有滚筒轴;所述滚筒轴的外部通过多组等间距均布的支撑杆固定有支撑环板,所述支撑环板上安装有均布的筛分杆,所述筛分杆的间距沿着头部支架向尾部支架方向依次增大,并构成锥形筛分筒结构;在锥形筛分筒结构的内壁固定有螺旋输送板;所述滚筒轴与用于驱动锥形筛分筒结构转动的动力装置相连,所述锥形筛分筒结构的底部设置有多级出料斗结构。此果蔬分级滚筒筛分机能够用于球形水果的自动分级,而且有效的增大了水果和滚

一种双臂果蔬采收机器人系统及其果蔬采收方法.pdf
本发明公开了一种双臂果蔬采收机器人系统及其果蔬采收方法。该系统中:双目立体视觉系统用于机器人行走运动的视觉导航和采收目标及障碍物位置信息的获取;机械手装置用于根据采收目标及障碍物的位置抓取分离;机器人移动平台用于在作业环境下自主运动;主控计算机是控制中心,集成了控制界面及各个软件模块,对整个系统进行控制。双目立体视觉系统包括两个彩色摄像机、图像采集卡和智能控制云台;机械手装置包括两个5自由度的机械臂本体,关节伺服驱动器及执行电机等;机器人移动平台包括轮式车体、电源及动力控制设备和果蔬收集装置。本发明使用双
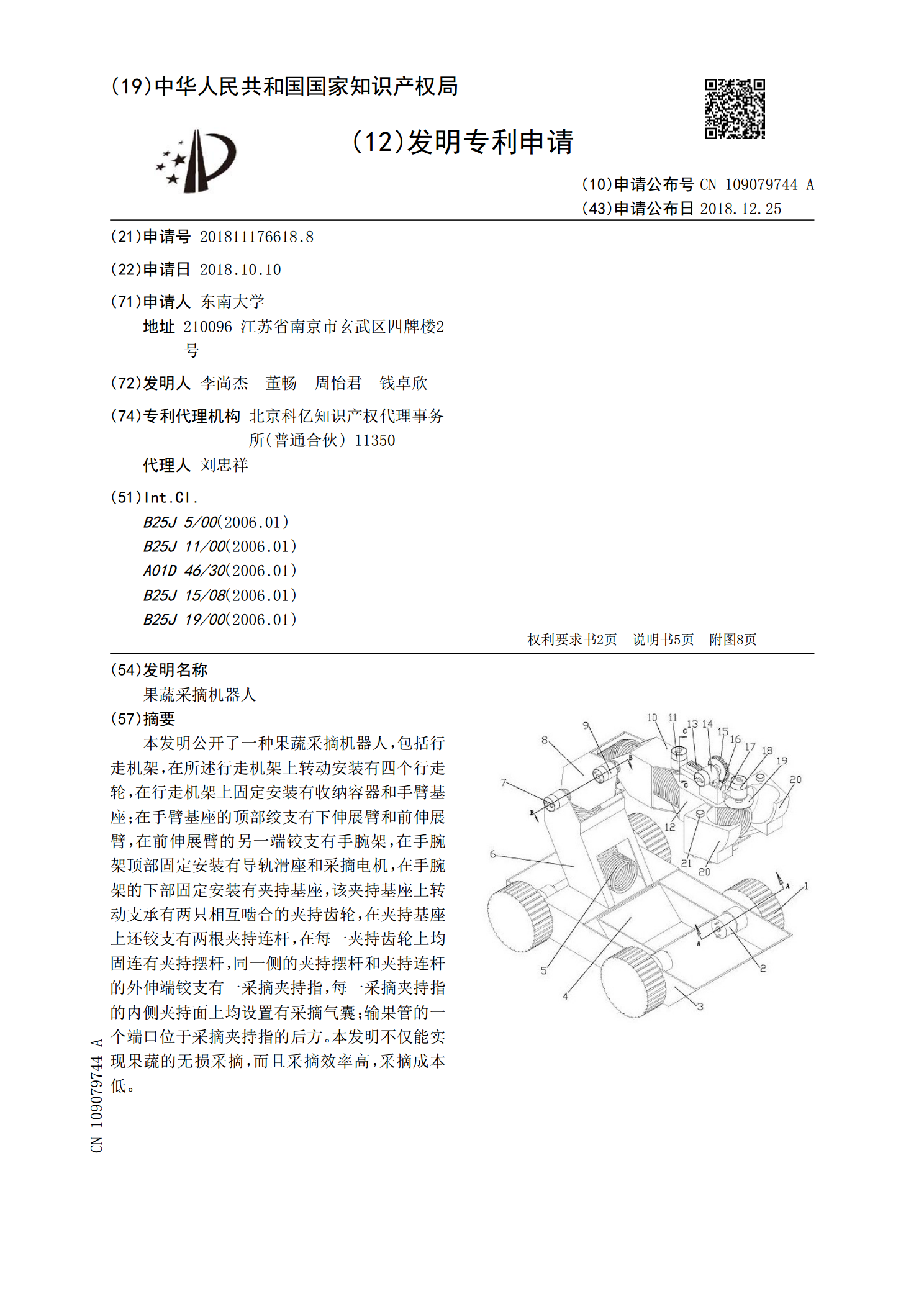
果蔬采摘机器人.pdf
本发明公开了一种果蔬采摘机器人,包括行走机架,在所述行走机架上转动安装有四个行走轮,在行走机架上固定安装有收纳容器和手臂基座;在手臂基座的顶部绞支有下伸展臂和前伸展臂,在前伸展臂的另一端铰支有手腕架,在手腕架顶部固定安装有导轨滑座和采摘电机,在手腕架的下部固定安装有夹持基座,该夹持基座上转动支承有两只相互啮合的夹持齿轮,在夹持基座上还铰支有两根夹持连杆,在每一夹持齿轮上均固连有夹持摆杆,同一侧的夹持摆杆和夹持连杆的外伸端铰支有一采摘夹持指,每一采摘夹持指的内侧夹持面上均设置有采摘气囊;输果管的一个端口位于
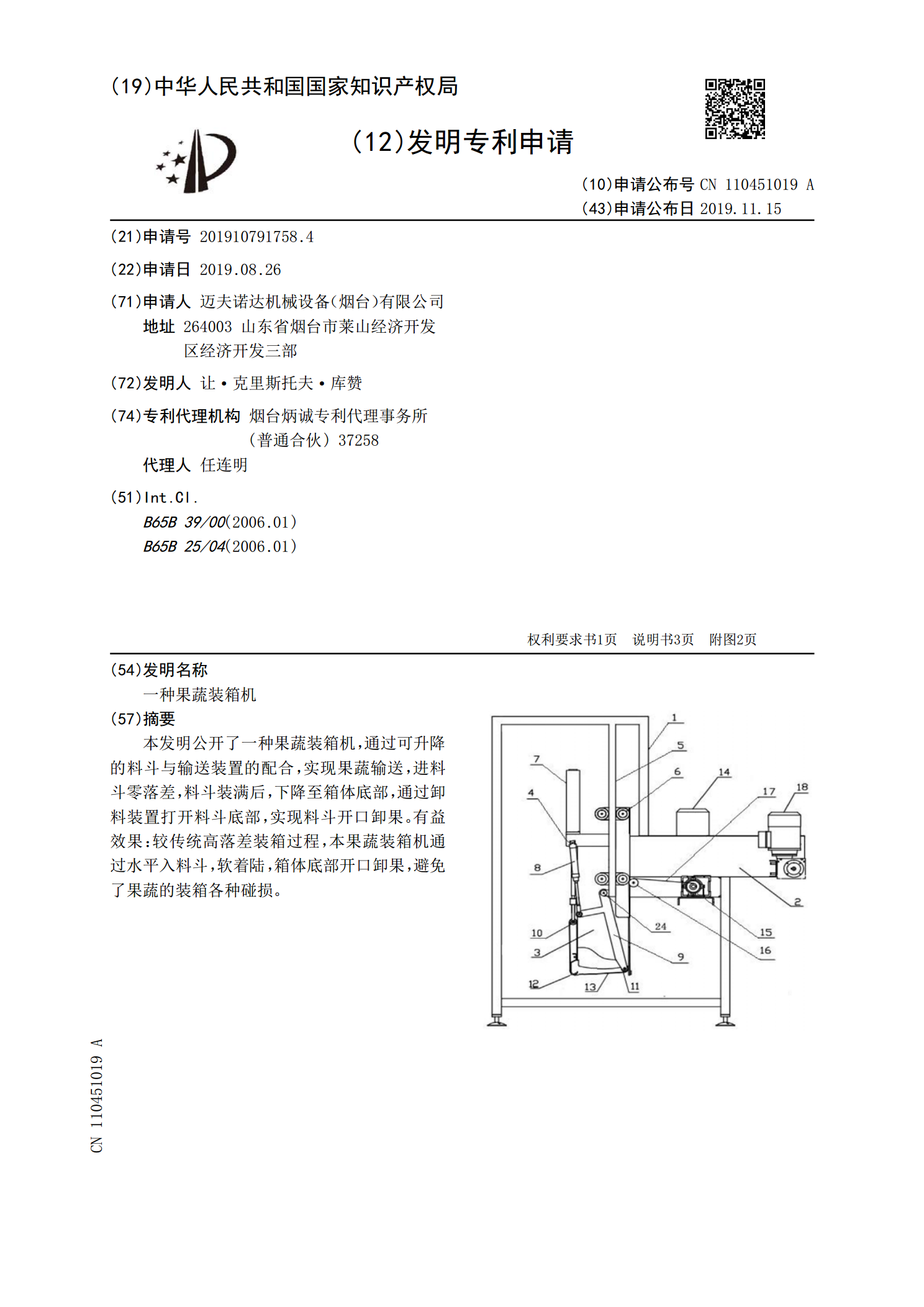
一种果蔬装箱机.pdf
本发明公开了一种果蔬装箱机,通过可升降的料斗与输送装置的配合,实现果蔬输送,进料斗零落差,料斗装满后,下降至箱体底部,通过卸料装置打开料斗底部,实现料斗开口卸果。有益效果:较传统高落差装箱过程,本果蔬装箱机通过水平入料斗,软着陆,箱体底部开口卸果,避免了果蔬的装箱各种碰损。