
果蔬采摘机器人.pdf

是来****文章

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
果蔬采摘机器人.pdf
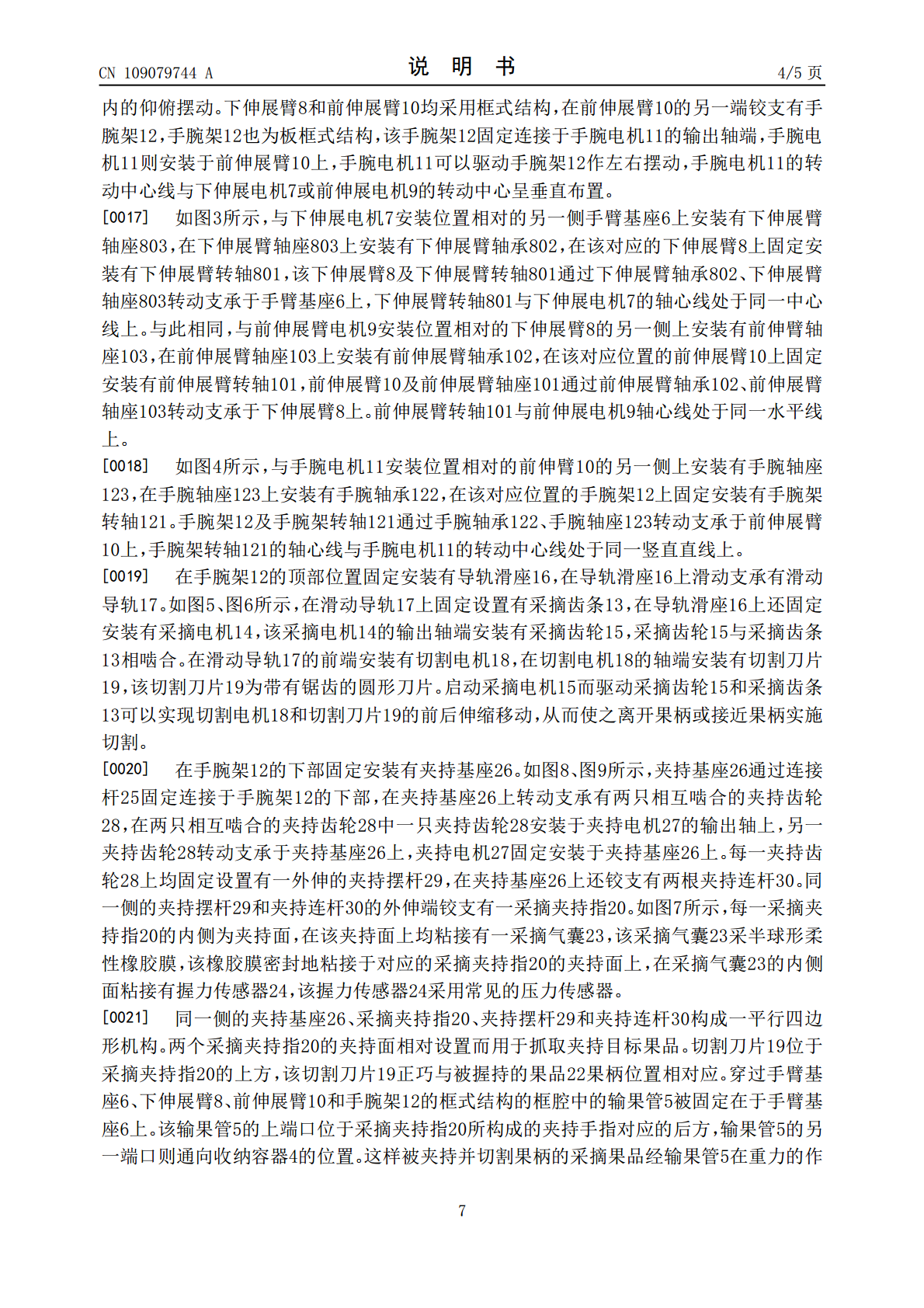
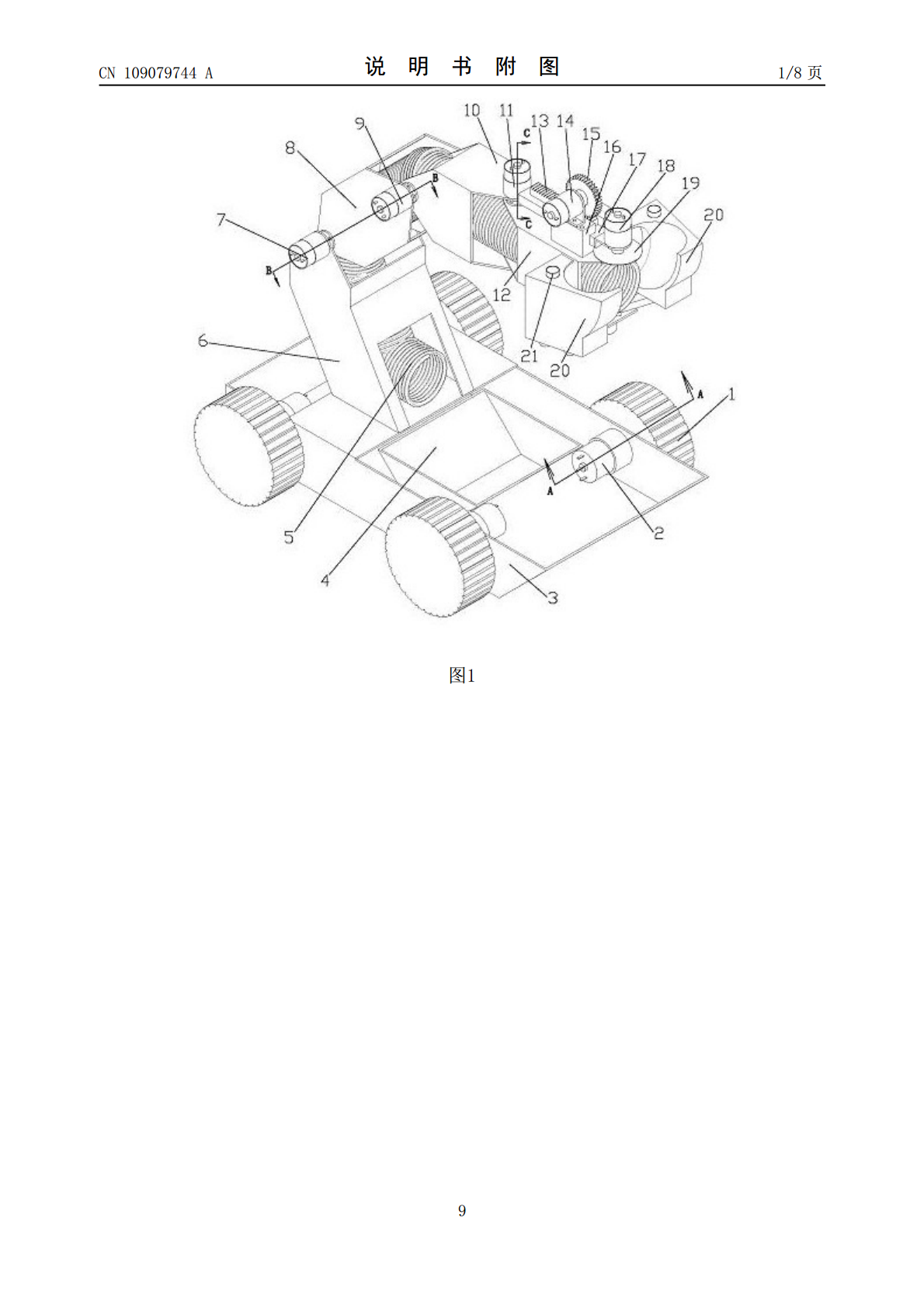
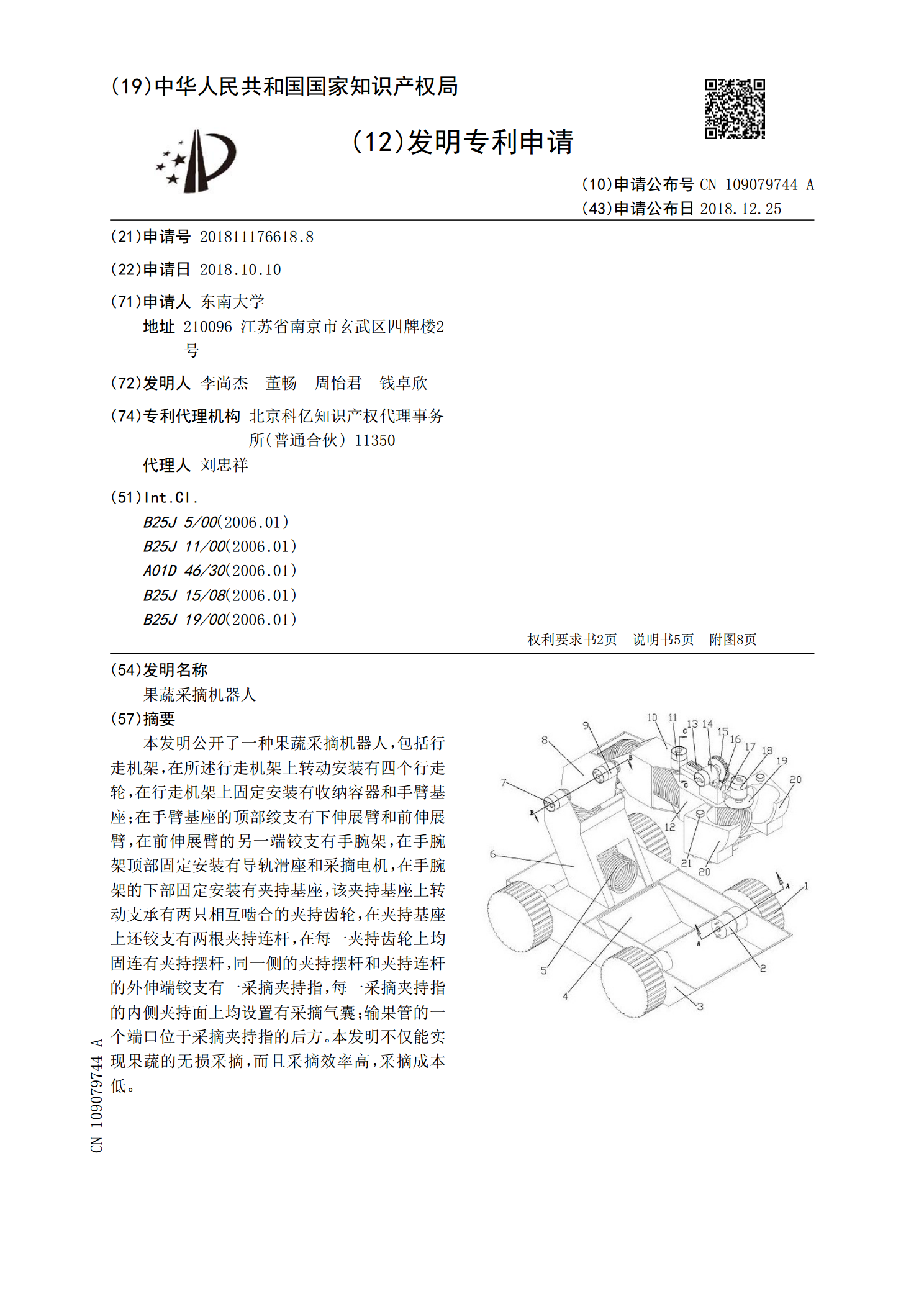
本发明公开了一种果蔬采摘机器人,包括行走机架,在所述行走机架上转动安装有四个行走轮,在行走机架上固定安装有收纳容器和手臂基座;在手臂基座的顶部绞支有下伸展臂和前伸展臂,在前伸展臂的另一端铰支有手腕架,在手腕架顶部固定安装有导轨滑座和采摘电机,在手腕架的下部固定安装有夹持基座,该夹持基座上转动支承有两只相互啮合的夹持齿轮,在夹持基座上还铰支有两根夹持连杆,在每一夹持齿轮上均固连有夹持摆杆,同一侧的夹持摆杆和夹持连杆的外伸端铰支有一采摘夹持指,每一采摘夹持指的内侧夹持面上均设置有采摘气囊;输果管的一个端口位于

多功能果蔬采摘机器人.pptx
多功能果蔬采摘机器人指导老师:宦键项目要求:该项目主要是解决采摘机器人场地适应性不强,机械手臂不灵活,采摘效率低,周期长等问题。底盘机械设计+实物制作过程主控部分:研究成果:采摘机器人一个后期计划:谢谢大家
果蔬采摘机器人的综述报告.pdf
摘要介绍了国内外果蔬采摘机器人的类型和特点,综述了国内外果蔬采摘机器人的研究进展,总结了果蔬采摘机器人的特点,归纳了果蔬采摘机器人研究中的关键问题并分析了典型的果蔬采摘机器人的机械结构及控制系统的过程机理等,比较了果蔬采摘机器人的动力源系统。在此基础上,对果蔬采摘机器人的研究前景进行了展望。关键词:引言随着电子计算机和自动控制技术的发展、农业高新科技的应用和推广,农业机器人已逐步进入到农业生产领域中,并将促进现代农业向着装备机械化、生产智能化的方向发展。果蔬采摘是农业生产中季节性强、劳动强度大、作业要求高
果蔬采摘机器人的综述报告.pdf
果蔬采摘机器人的文献综述摘要介绍了国内外果蔬采摘机器人的类型和特点,综述了国内外果蔬采摘机器人的研究进展,总结了果蔬采摘机器人的特点,归纳了果蔬采摘机器人研究中的关键问题并分析了典型的果蔬采摘机器人的机械结构及控制系统的过程机理等,比较了果蔬采摘机器人的动力源系统。在此基础上,对果蔬采摘机器人的研究前景进行了展望。关键词:引言随着电子计算机和自动控制技术的发展、农业高新科技的应用和推广,农业机器人已逐步进入到农业生产领域中,并将促进现代农业向着装备机械化、生产智能化的方向发展。果蔬采摘是农业生产中季节性强

关于果蔬采摘机器人的研究探讨.docx
关于果蔬采摘机器人的研究探讨【摘要】在农业领域人力采摘果蔬的果实需要耗费相当大的人力物力在工业生产浪潮下实现农业果蔬采摘机械化已经是一种趋势。本文就目前果蔬采摘机器人的现状进行了探讨。【关键词】果蔬采摘机器人;识别率;定位;末端执行器在农业生产中果蔬的栽培和生长需要用较长的时间来进行当果蔬成熟之后又需要耗费大量的经历来对其进行采摘如果采摘不恰当对果蔬造成了损害就会造成一定的经济损失。果蔬的采摘工作是一项需要耗费很多劳动力的过程而且在工业生产快速发展的今天