
仿生按摩手.pdf

猫巷****婉慧


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

仿生按摩手.pdf
本发明属于仿生按摩手,由外壳、把手、减速电机和电子控制板所组成,包括基板用于连接左、右按摩手结构及固定带动左、右按摩手结构运转的减速电机和外壳。第一、第二L型齿条用于将减速电机通过传动齿轮传动的动力传递至左、右按摩手结构。第一、第二L型齿条的内侧边为与传动齿轮咬合的齿牙条,第一、第二L型齿条的内侧边分别位于第一、第二滑槽内且通过压板轴设在两滑槽内。左、右按摩手结构用于与人体接触实现按压、抓捏、揉推人体皮肤表面及皮下组织功能。本发明能机械仿生人手抓、捏、揉推的按摩治疗手段对人体任何一个部位进行按摩,具有结构

手抓仿生式按摩器.pdf
本发明公开了一种手抓仿生式按摩器,包括壳体、电源、多个驱动轮、多个按摩组件、多个衔接件,上述驱动轮、上述衔接件均设置在壳体内,上述驱动轮均连接上述衔接件,上述驱动轮驱使上述衔接件朝向上述壳体的中轴线并且以垂直于上述壳体的中轴线做往复运动,上述壳体设置有多个条形槽暴露上述衔接件,上述按摩组件均设置在上述壳体外,并且固定在上述衔接件。本发明的有益效果在于,以仿生手抓的方式来完成按摩,其效果较传统的按摩器较佳。

仿生万向按摩机械手.pdf
一种仿生万向按摩机械手,包括机芯组件,机芯组件包括一对按摩头,按摩头分别通过揉捏手臂转动连接于固定座一上,固定座一上安装有驱动揉捏手臂内外转动的第一数字型步进电机,固定座一安装在转动盘上,转动盘底部固定有从动齿轮并转动安装于底盘上,底盘上安装有与从动齿轮啮合的主动齿轮以及驱动主动齿轮转动的第二数字型步进电机,底盘的左右两侧分别固定有固定座二。固定座二转动连接有上下两个万向节,万向节安装在横向转轴上,横向转轴安装在安装架上并连接有变速器,安装架设有与变速器连接的蜗杆电机;安装架的左右两边分布安装有滑动轮,滑

吊臂式仿生按摩机.ppt
北华大学机械工程学院第二届“挑战杯”竞赛研究背景——社会需求研究背景——现有产品及其问题总体方案描述方案描述——揉搓单元方案描述——按压机构控制系统流程图按摩机器人的研究意义项目进度安排谢谢!请各位评委给予指导!
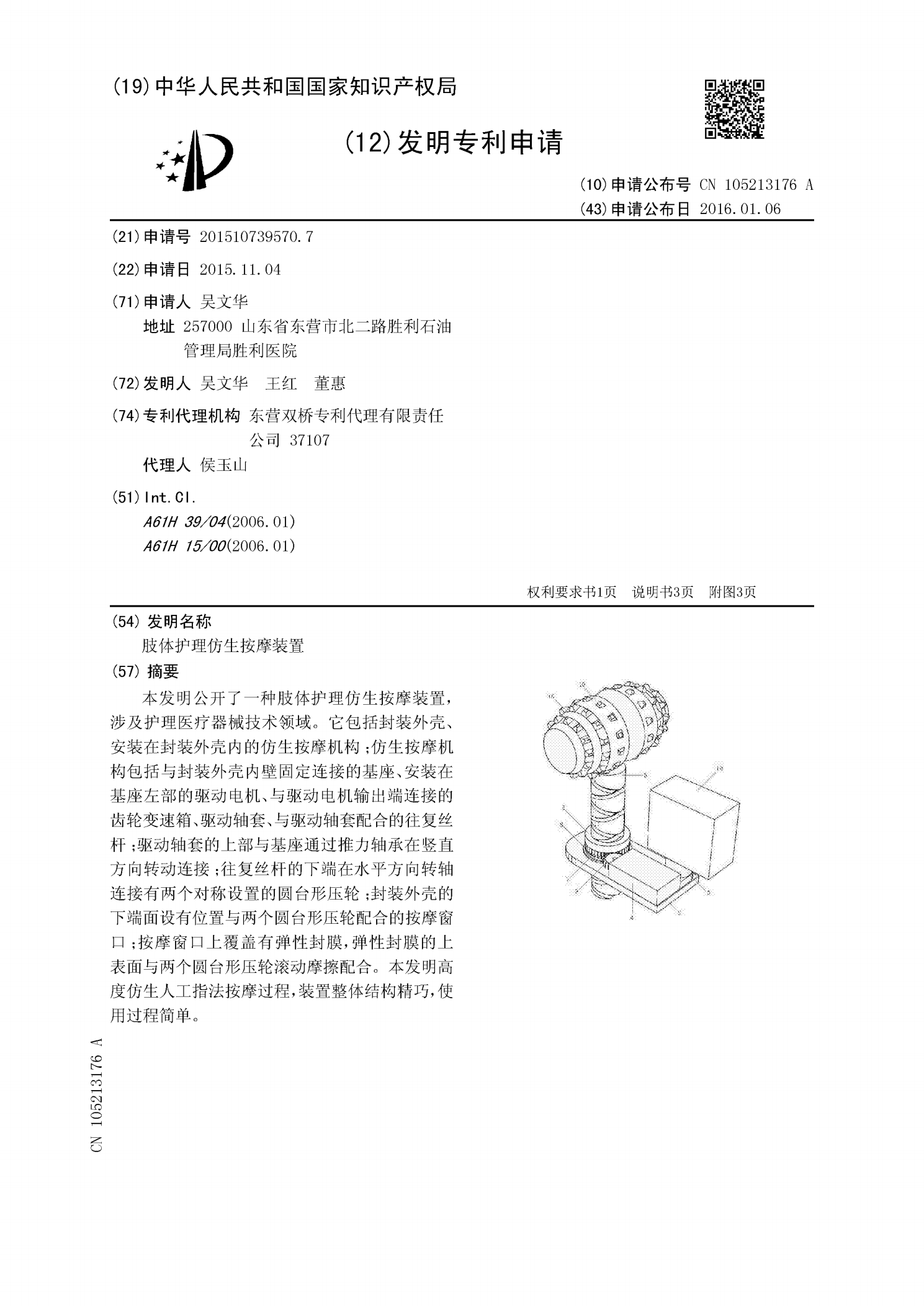
肢体护理仿生按摩装置.pdf
本发明公开了一种肢体护理仿生按摩装置,涉及护理医疗器械技术领域。它包括封装外壳、安装在封装外壳内的仿生按摩机构;仿生按摩机构包括与封装外壳内壁固定连接的基座、安装在基座左部的驱动电机、与驱动电机输出端连接的齿轮变速箱、驱动轴套、与驱动轴套配合的往复丝杆;驱动轴套的上部与基座通过推力轴承在竖直方向转动连接;往复丝杆的下端在水平方向转轴连接有两个对称设置的圆台形压轮;封装外壳的下端面设有位置与两个圆台形压轮配合的按摩窗口;按摩窗口上覆盖有弹性封膜,弹性封膜的上表面与两个圆台形压轮滚动摩擦配合。本发明高度仿生人