
一种全自动化餐饮空中输送系统.pdf

佳宁****么啦

1/5

2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全自动化餐饮空中输送系统.pdf
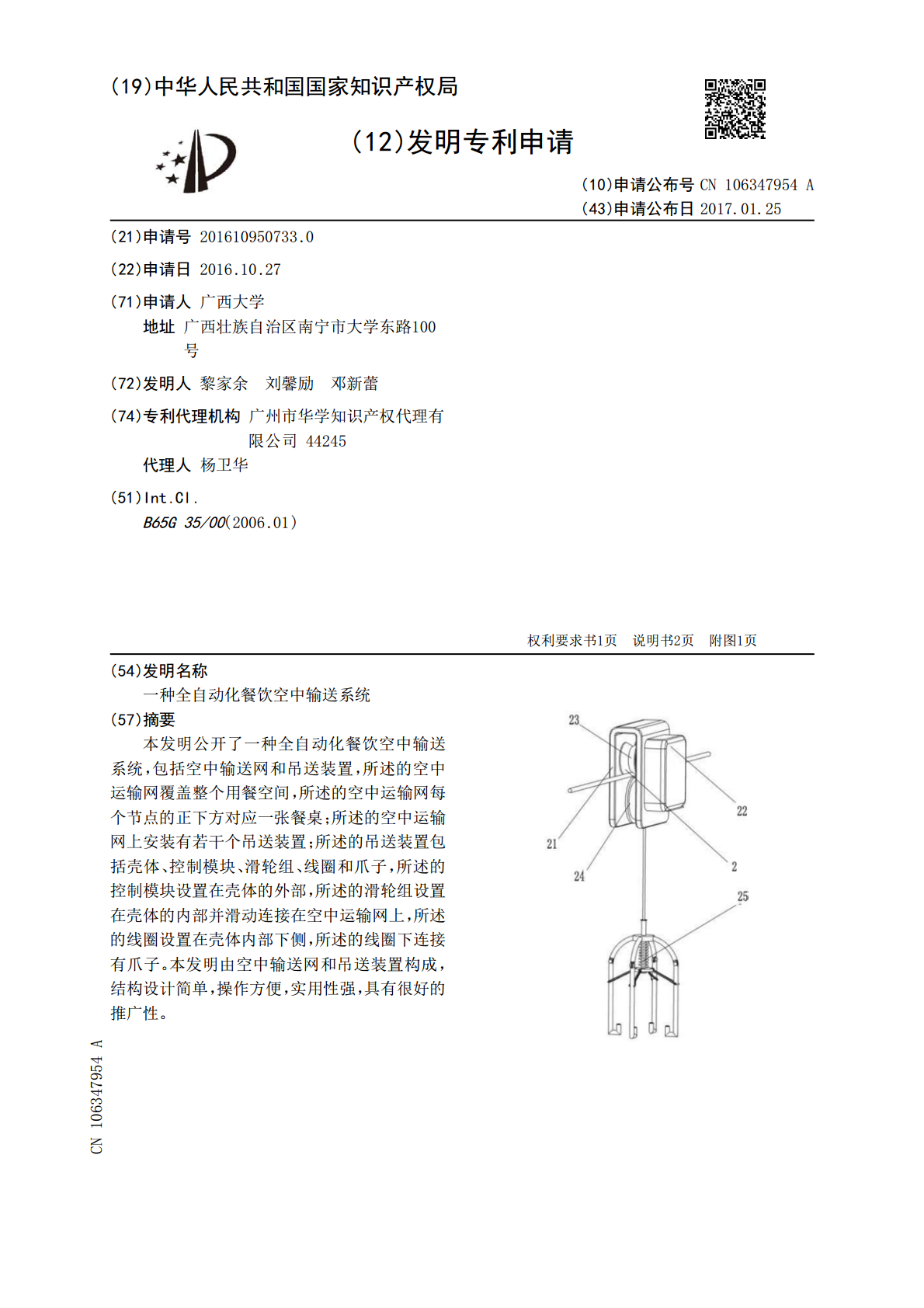
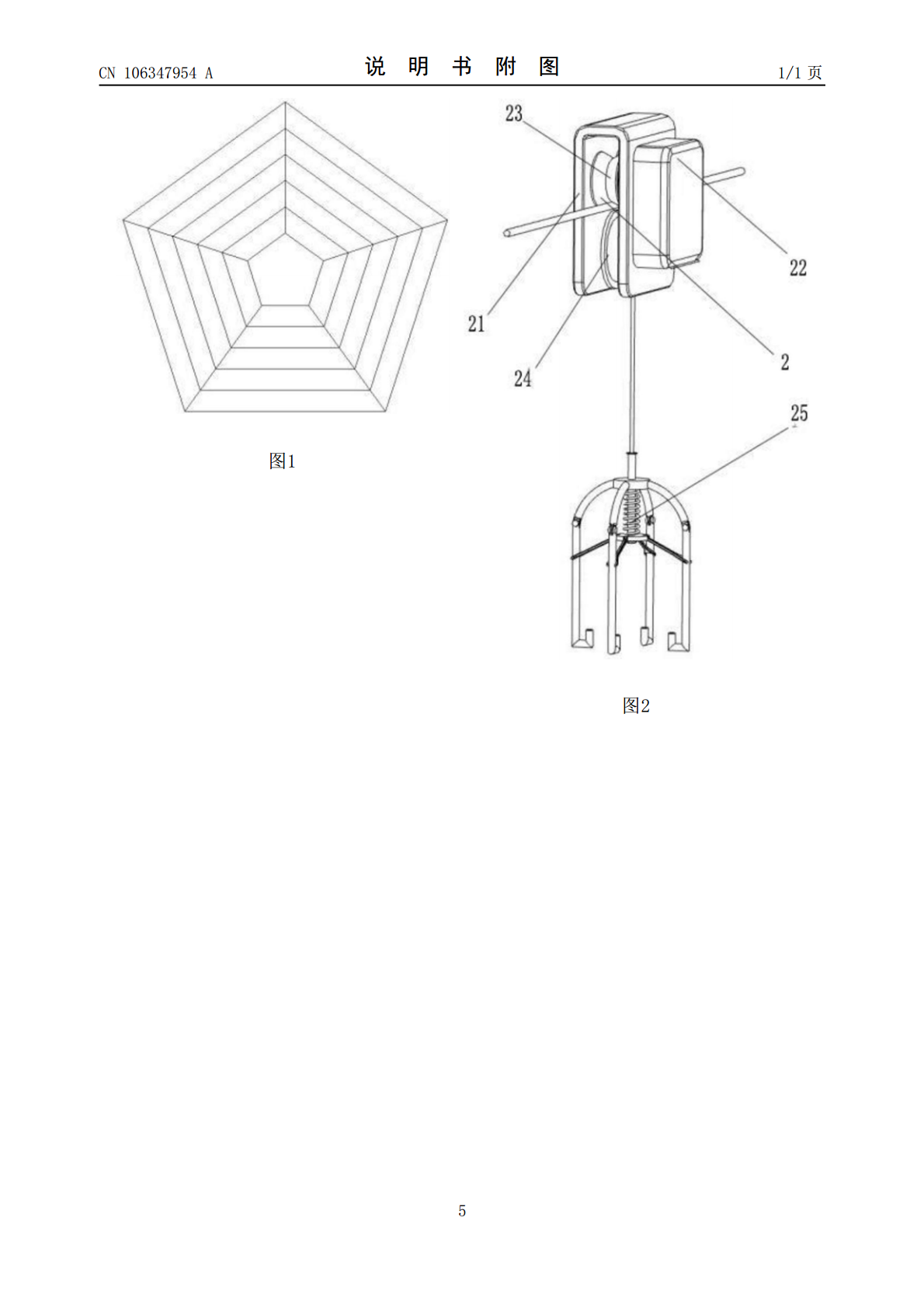
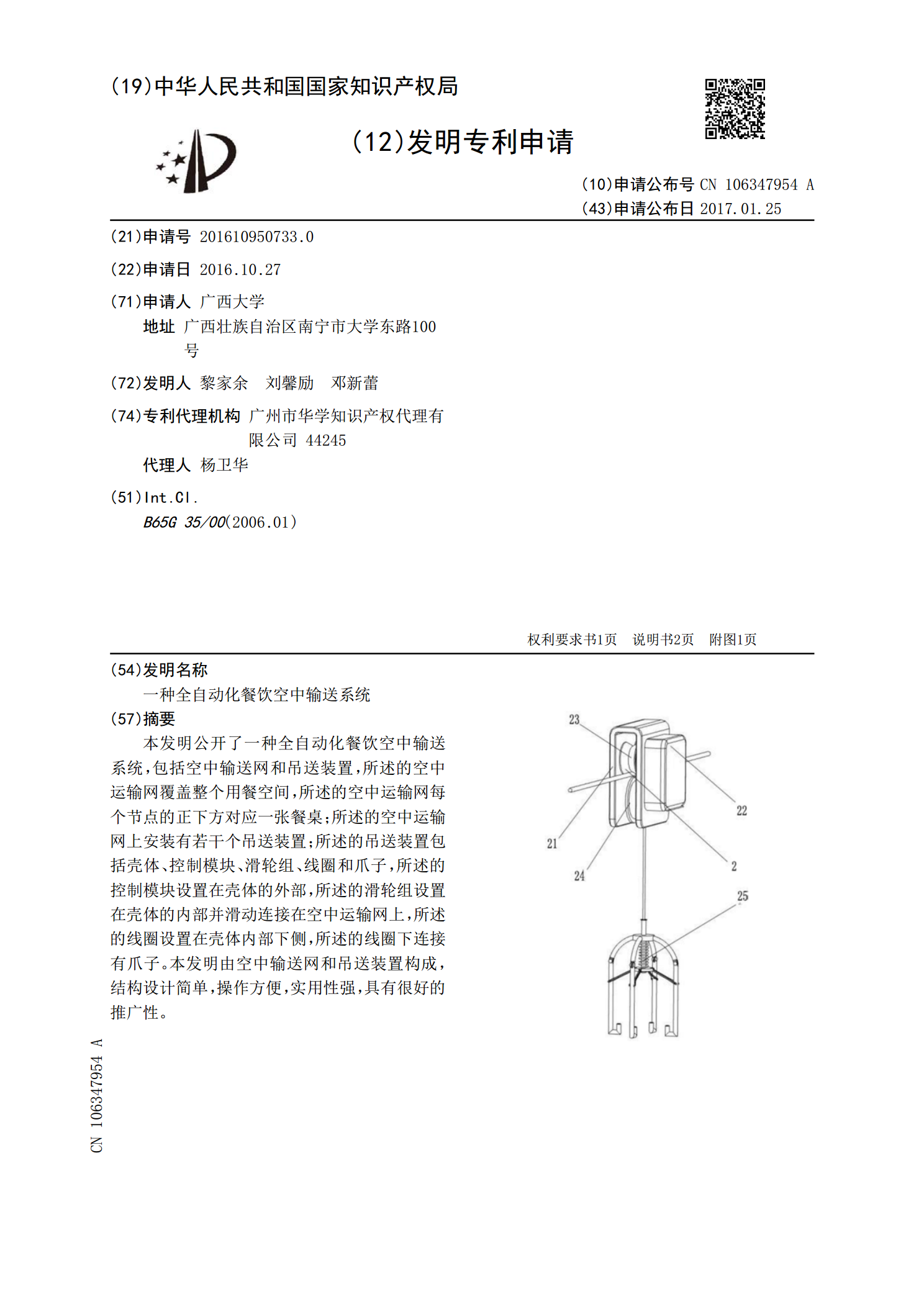
本发明公开了一种全自动化餐饮空中输送系统,包括空中输送网和吊送装置,所述的空中运输网覆盖整个用餐空间,所述的空中运输网每个节点的正下方对应一张餐桌;所述的空中运输网上安装有若干个吊送装置;所述的吊送装置包括壳体、控制模块、滑轮组、线圈和爪子,所述的控制模块设置在壳体的外部,所述的滑轮组设置在壳体的内部并滑动连接在空中运输网上,所述的线圈设置在壳体内部下侧,所述的线圈下连接有爪子。本发明由空中输送网和吊送装置构成,结构设计简单,操作方便,实用性强,具有很好的推广性。

一种全自动化餐饮地上输送系统.pdf
本发明公开了一种全自动化餐饮地上输送系统,包括输送轨道、驱动装置、支撑件、电机和控制箱,所述的输送轨道安装在支撑件上,所述的输送轨道上设置有若干个驱动装置,所述的电机与控制箱连接;所述的输送轨道为循环式轨道,由呈L型的外轨道和内轨道组成,所述的内轨道设置在外轨道所围成的空间内并处于同一水平面。本发明的一种全自动化餐饮地上输送系统采用自动化设计,通过电控控制,减少了人力资源的消耗;输送效果好可以根据具体情况增加餐桌点或延长输送轨道的长度;轨道载体采用磁性材料制成,输送菜品时在驱动轮的作用下可以使轨道载体始终

空中悬挂输送系统.pdf
一种空中悬挂输送系统,包括:轨道,轨道为悬挂式轨道;输送小车;驱动系统,驱动系统包括有设置于轨道上的摩擦轴以及设置于输送小车上的摩擦轮,摩擦轴于轨道上可旋转设置,摩擦轮与摩擦轴滚动接触,摩擦轮与摩擦轴之间具有摩擦力,摩擦力至少具有平行于摩擦轴轴向的分力,分力用于驱动输送小车于轨道上行进。本发明中轨道采用悬空设置的方式,有效地利用工厂立体空间,可以实现悬挂物料的输送及智能调度。本发明可以有效的解决物料供应端到物料需求端之间物料定向调度及传送时间长导致传送效率低下的问题。采用摩擦轴与摩擦轮配合,其结构构成简单

一种自动化仓储输送系统.pdf
本发明公开了一种自动化仓储输送系统,包括第一支柱,所述第一支柱的左端安装有控制面板,所述第一支柱的左方有第二支柱,所述第一支柱与第二支柱的上端之间连接有第一输送带,所述第二支柱的左侧上端连接有支撑板,所述支撑板的上端安装有第三电机,所述第三电机的上方连接有支板,所述支板左下端安装有第二电机,所述第二电机的下方连接有夹具,所述第二支柱的右下端有第二从动轮。本发明通过设置第一夹板、正极板、灯泡、负极板、第二夹板、连接杆、第一电机、第一电动伸缩轴、活动板和控制面板结构,解决了装置存在无法对锂离子进行检测和装置在

一种面料自动化输送系统.pdf
本发明公开了一种面料自动化输送系统,涉及到面料输送技术领域,其输送系统包括底座,所述底座的顶部固定连接有支撑柱,且支撑柱的数量为两个,所述支撑柱的顶部固定连接有放置箱,所述放置箱的底部滑动连接有滑动门,所述底座的底部内壁固定连接有电机,本发明通过控制电机的输出轴进行转动,电机的输出轴可以控制半齿轮进行转动,通过控制半齿轮的转动,半齿轮可以循环控制齿条进行移动,从而实现自动控制滑动门进行循环移动的效果,同时随着半齿轮的转动,半齿轮可以与辅助套进行连接,进而控制转动柱进行转动的效果,此时可以自动控制传送带的转