
一种机器人关节精密传动齿结构.pdf

如灵****姐姐

1/8

2/8

3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人关节精密传动齿结构.pdf
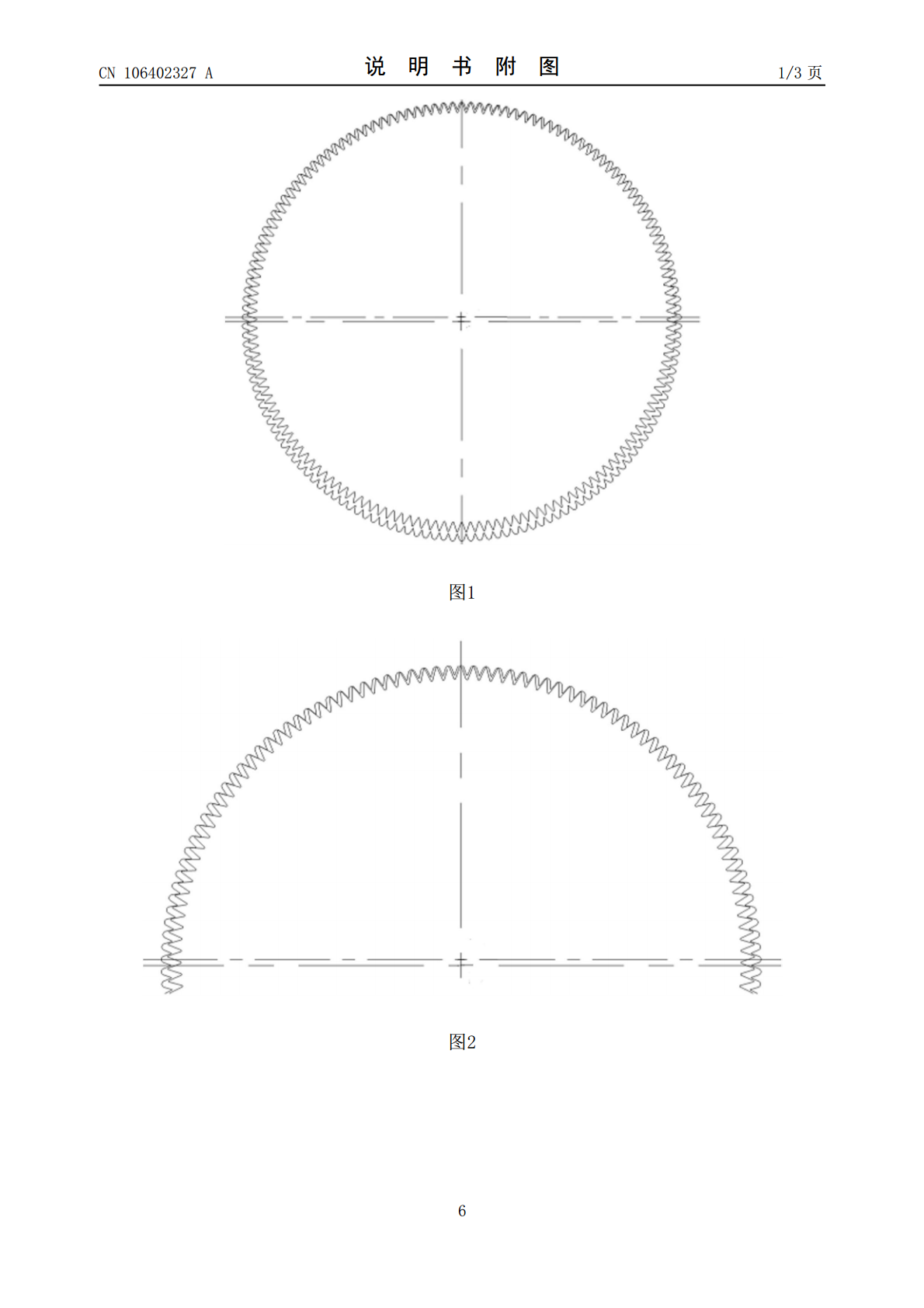
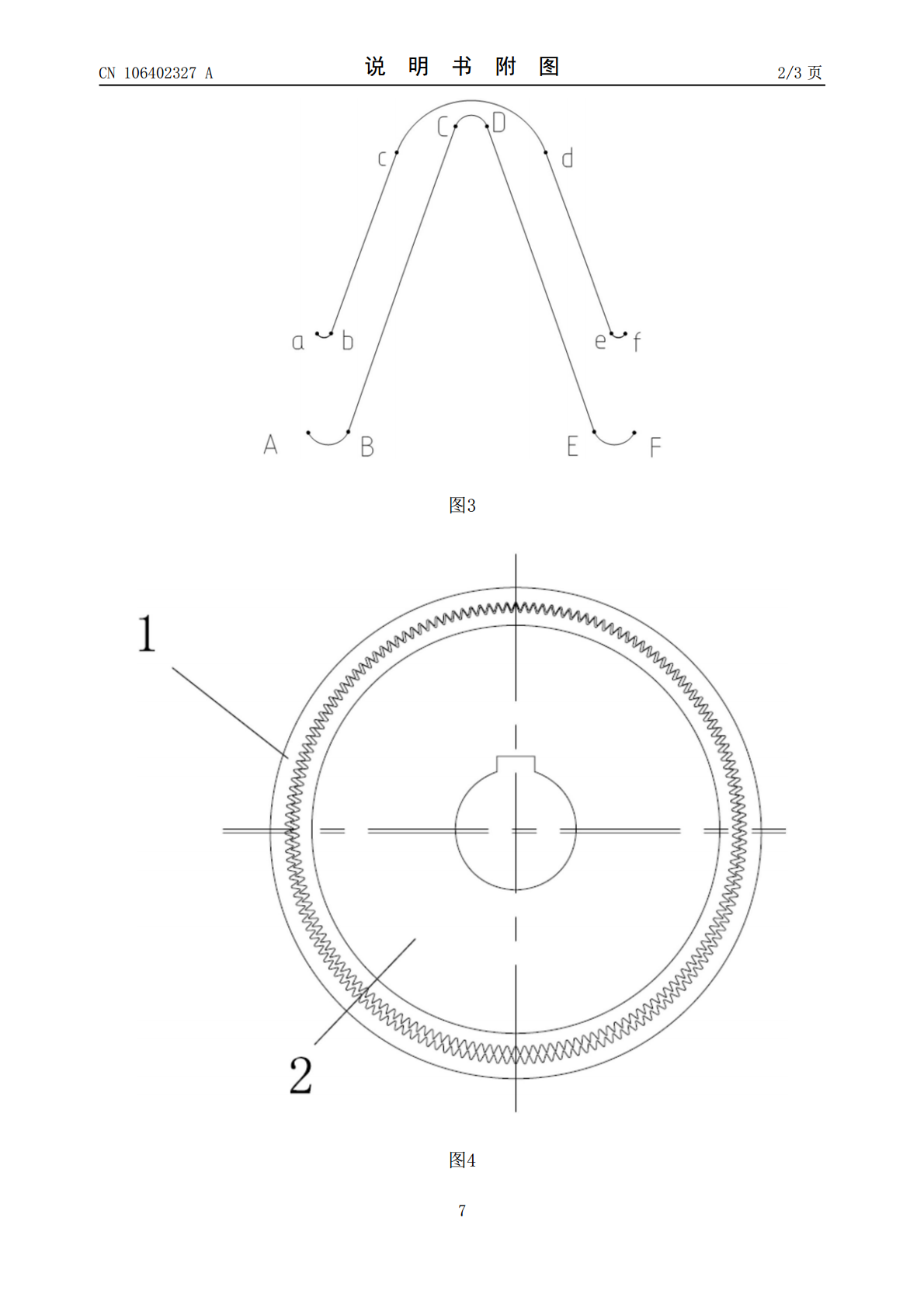
本发明涉及一种机器人关节精密传动齿结构,包括外齿轮(1)和内齿轮(2),所述的外齿轮(1)的齿形由对数螺线齿廓和过渡齿廓组成,内齿轮(2)的齿廓与外齿轮(1)齿廓形成共轭齿廓,通过共轭设计,形成一对内啮合的齿轮副。本发明在保证齿廓受力传力安全实现的前提下,对齿廓的齿形进行灵活的小压力角设计,减小径向受力分量,提高驱动力分量,实现精密、高效、长寿命的传动目的。
一种变厚机器人关节传动结构.pdf
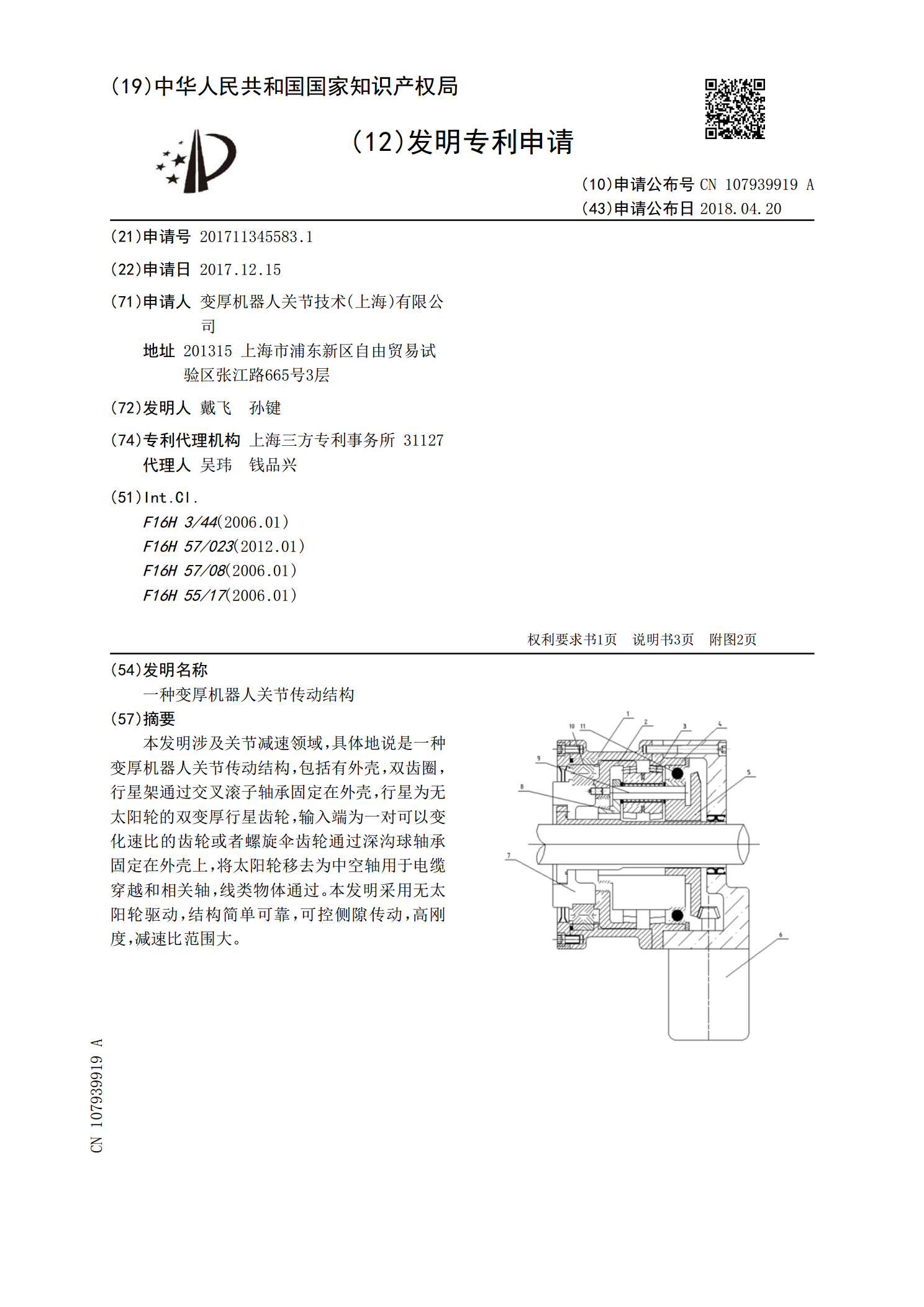
本发明涉及关节减速领域,具体地说是一种变厚机器人关节传动结构,包括有外壳,双齿圈,行星架通过交叉滚子轴承固定在外壳,行星为无太阳轮的双变厚行星齿轮,输入端为一对可以变化速比的齿轮或者螺旋伞齿轮通过深沟球轴承固定在外壳上,将太阳轮移去为中空轴用于电缆穿越和相关轴,线类物体通过。本发明采用无太阳轮驱动,结构简单可靠,可控侧隙传动,高刚度,减速比范围大。
一种变厚机器人关节传动结构.pdf
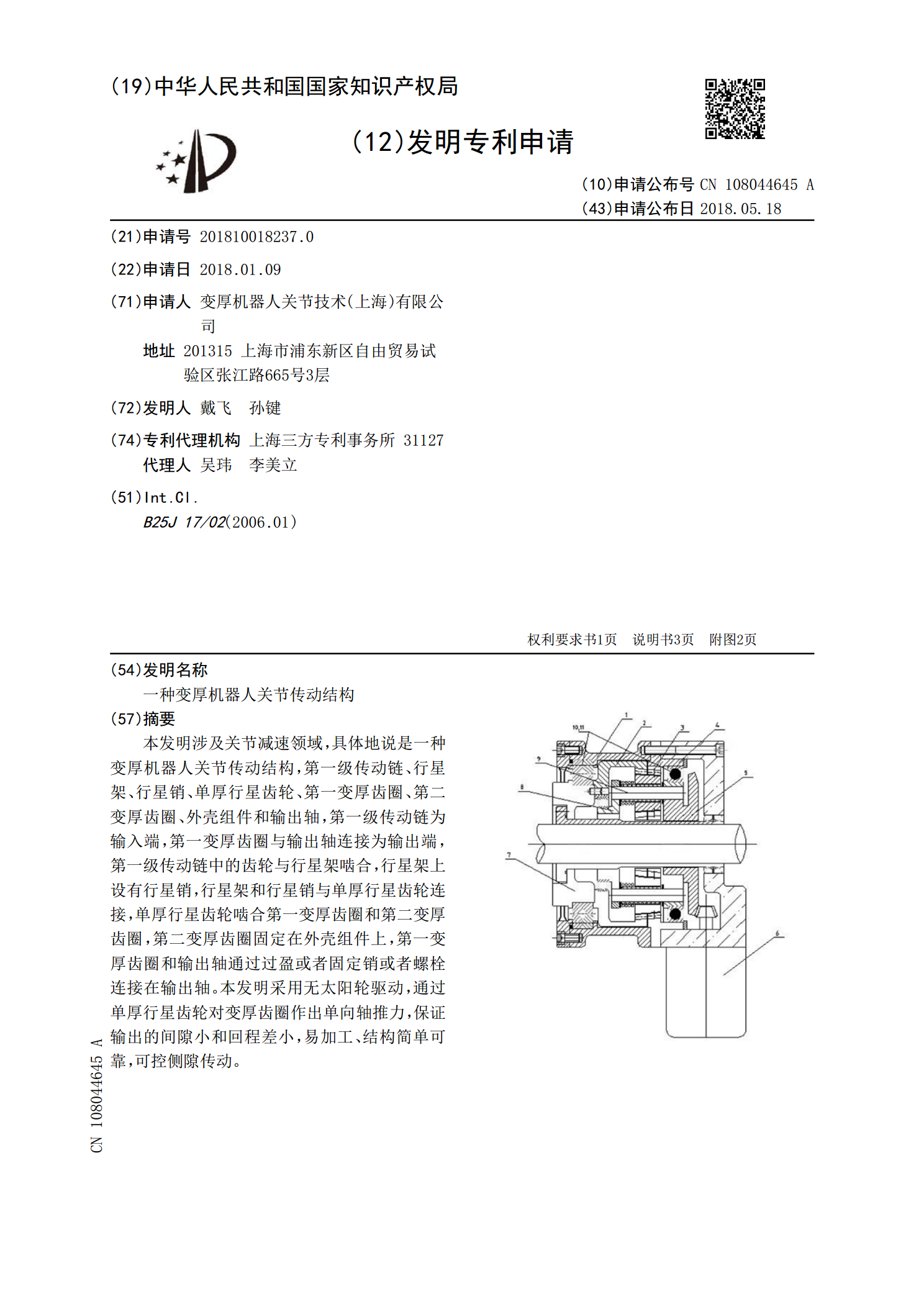
本发明涉及关节减速领域,具体地说是一种变厚机器人关节传动结构,第一级传动链、行星架、行星销、单厚行星齿轮、第一变厚齿圈、第二变厚齿圈、外壳组件和输出轴,第一级传动链为输入端,第一变厚齿圈与输出轴连接为输出端,第一级传动链中的齿轮与行星架啮合,行星架上设有行星销,行星架和行星销与单厚行星齿轮连接,单厚行星齿轮啮合第一变厚齿圈和第二变厚齿圈,第二变厚齿圈固定在外壳组件上,第一变厚齿圈和输出轴通过过盈或者固定销或者螺栓连接在输出轴。本发明采用无太阳轮驱动,通过单厚行星齿轮对变厚齿圈作出单向轴推力,保证输出的间隙

一种锥齿传动管道机器人的主体结构.pdf
本发明公开了一种锥齿传动管道机器人的主体结构,包括支架和两个驱动装置,以及固设在支架上的控制器;每个驱动装置包括驱动滚筒和两个驱动滚轮;每个驱动滚轮包括第一锥齿轮、第二锥齿轮、第一连接件和滚轮,第一锥齿轮的一端沿轴线方向外凸起延伸形成凸台,凸台的中心沿轴线方向开设有贯穿第一锥齿轮的第一通孔;第一连接件与第一转轴固连,第一转轴上转动套设第二锥齿轮和滚轮,第一锥齿轮和第二锥齿轮啮合,第二锥齿轮与滚轮同轴固连,第二锥齿轮的半径小于滚轮的半径。通过设计成采用锥齿传动的结构,且第一锥齿轮和第二锥齿轮的齿数比为1:(

一种应用于精密机械结构上的齿啮合传动部件.pdf
一种应用于精密机械结构上的齿啮合传动部件,包括本体(1),在所述本体(1)的至少一部分外缘上成型有以所述本体(1)的旋转轴为中心,一半径相同弧形布置的啮合齿组(3),其特征在于:所述本体(1)为薄片形状,所述啮合齿(4)沿轴向分为两层,两层所述啮合齿(4)的齿形、齿距相同,且层间相邻所述啮合齿(4)沿周向相互错开设置。本发明提供的齿啮合传动部件啮合稳定、精确,传动连续、平稳,加工方便。