
液压传动抱夹及推升轮胎整体式汽车智能搬运器.pdf

一吃****仪凡


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

液压传动抱夹及推升轮胎整体式汽车智能搬运器.pdf
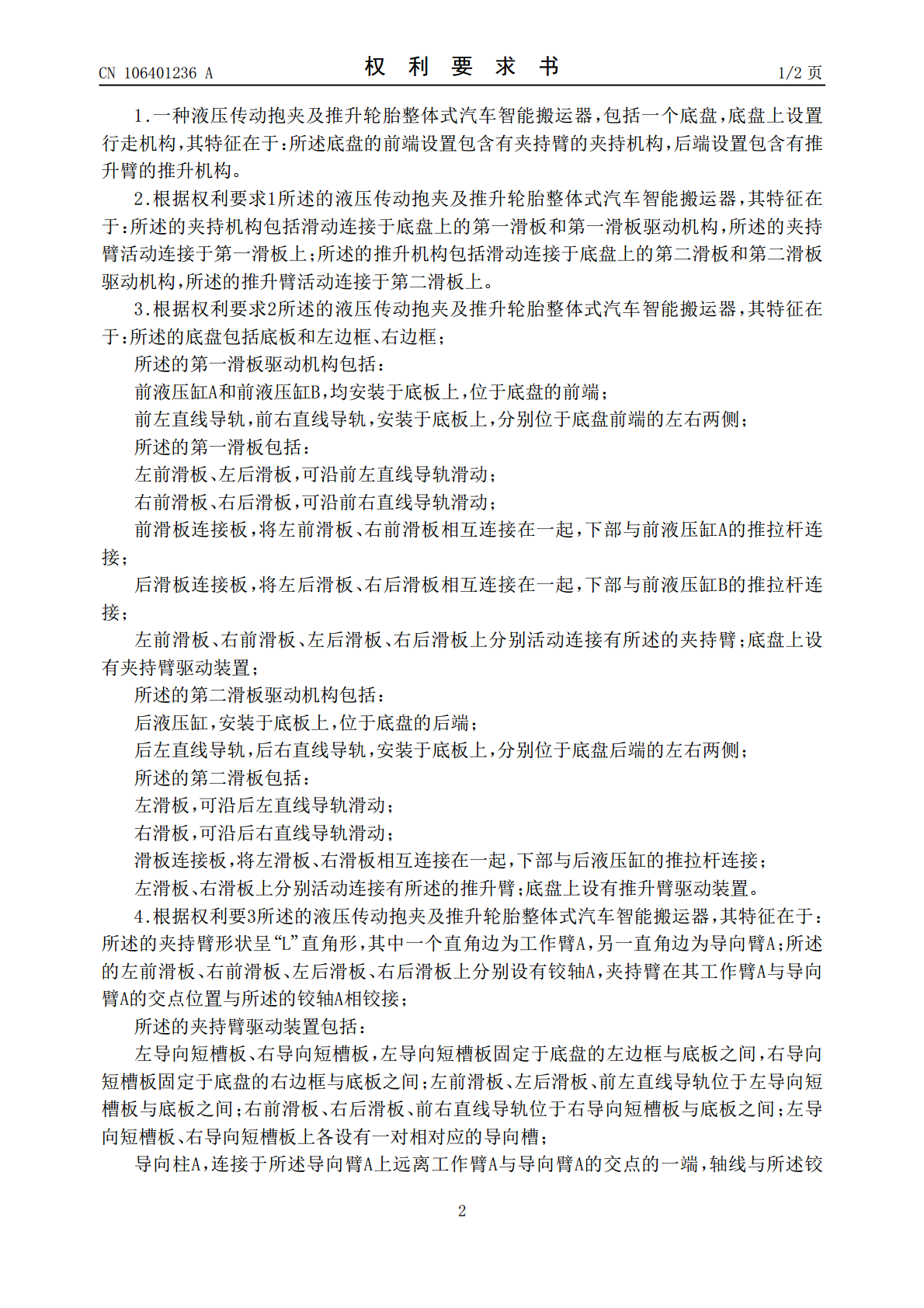
本发明公开了一种液压传动抱夹及推升轮胎整体式汽车智能搬运器。底盘上设有行走机构,底盘的前端设置夹持机构,后端设置推升机构,夹持机构包括活动连接有夹持臂的第一滑板及其驱动机构,导向槽板固定于底盘上,利用滑板和导向槽板上的“L”形导向槽以及夹持臂三者之间的相互作用与配合,将滑板的直线运动在“L”形导向槽的引导下迫使夹持臂做旋摆和直线动作,实现夹持臂旋转展开与收拢动作后,再以直线运动实现工作臂的平行抱轮搬运车辆;推升机构包括活动连接有推升臂的第二滑板及其驱动机构,推升臂与夹持臂结构类似,向后移动时逐渐将后轮胎推
抱夹及推升轮胎整体式汽车智能搬运器.pdf
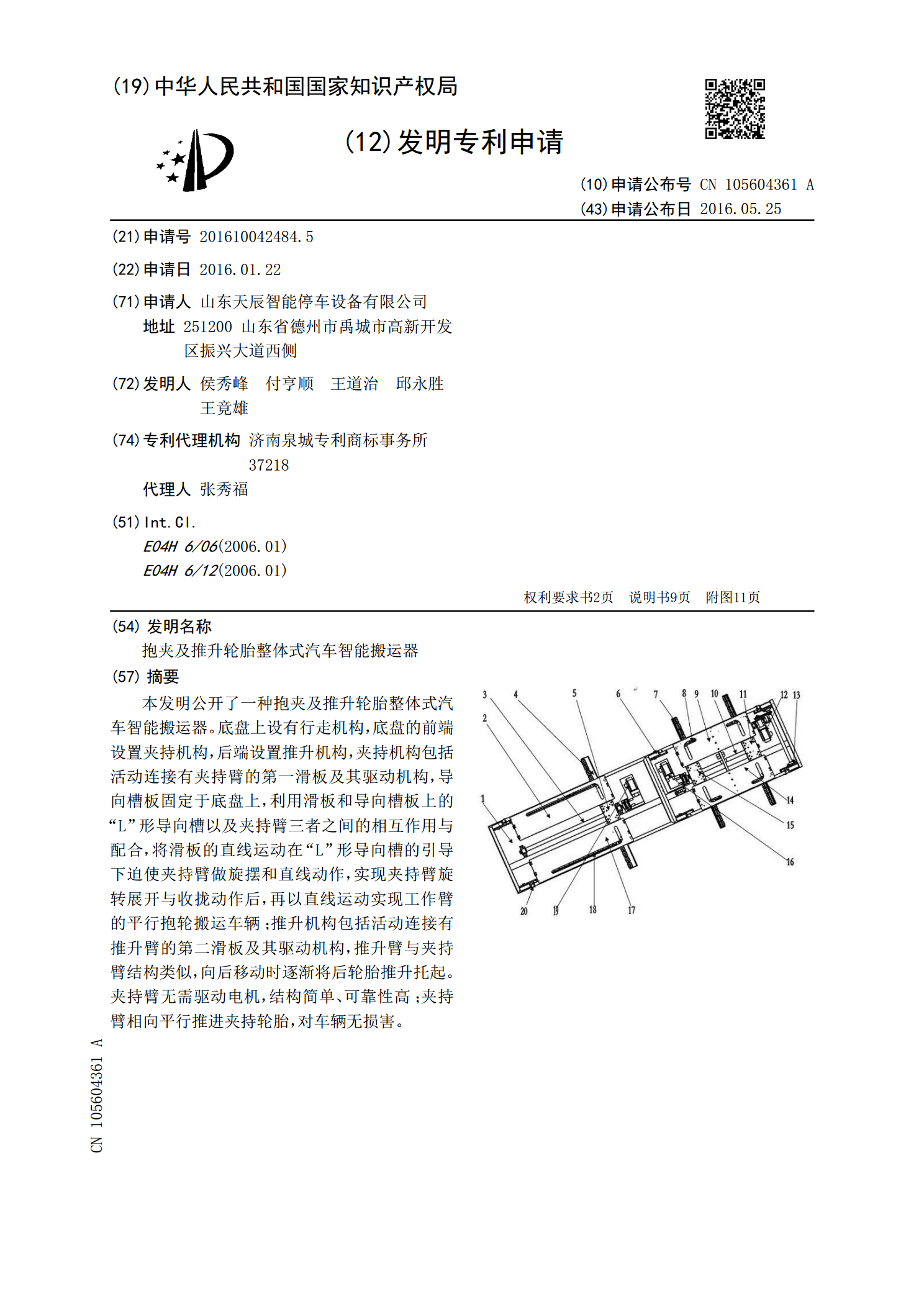
本发明公开了一种抱夹及推升轮胎整体式汽车智能搬运器。底盘上设有行走机构,底盘的前端设置夹持机构,后端设置推升机构,夹持机构包括活动连接有夹持臂的第一滑板及其驱动机构,导向槽板固定于底盘上,利用滑板和导向槽板上的“L”形导向槽以及夹持臂三者之间的相互作用与配合,将滑板的直线运动在“L”形导向槽的引导下迫使夹持臂做旋摆和直线动作,实现夹持臂旋转展开与收拢动作后,再以直线运动实现工作臂的平行抱轮搬运车辆;推升机构包括活动连接有推升臂的第二滑板及其驱动机构,推升臂与夹持臂结构类似,向后移动时逐渐将后轮胎推升托起。

自定位整体式双抱夹汽车轮胎智能搬运器.pdf
本发明公开了一种自定位整体式双抱夹汽车轮胎智能搬运器。底盘的前端设置固定式夹持机构,后端设置滑动式夹持机构,固定式夹持机构包括活动连接有第一夹持臂的第一滑板及其驱动机构,导向槽板固定于底盘上,利用滑板和导向槽板上的“L”形导向槽以及第一夹持臂三者之间的相互作用与配合,将滑板的直线运动在“L”形导向槽的引导下迫使第一夹持臂做旋摆和直线动作,实现第一夹持臂旋转展开与收拢动作后,再以直线运动实现工作臂的平行抱轮搬运车辆;滑动式夹持机构包括活动连接有第二夹持臂的第二滑板及其驱动机构,第二夹持臂与第一夹持臂结构类似

一种抱夹轮胎汽车搬运器.pdf
一种抱夹轮胎汽车搬运器,属于车辆移动设备技术领域,包括两个车架,两个车架通过连接机构同轴连接;两个车架上均设置有移动机构和抱夹机构;所述移动机构设置有伺服电机和行走轮;伺服电机通过链条带动行走轮转动;所述抱夹机构包括抱夹电机和两对左右对称设置的抱臂;抱夹电机通过传动机构控制每对抱臂的张合。采用了滚珠丝杠传动的方式,将滚珠丝杆的回转运动转化成丝杆螺母的直线运动,并设置双连杆,利用杠杆原理,将丝杆螺母的直线运动转化成抱臂的旋转运动,控制精准,传动平稳。
扇形齿轮传动抱夹搬运器.pdf
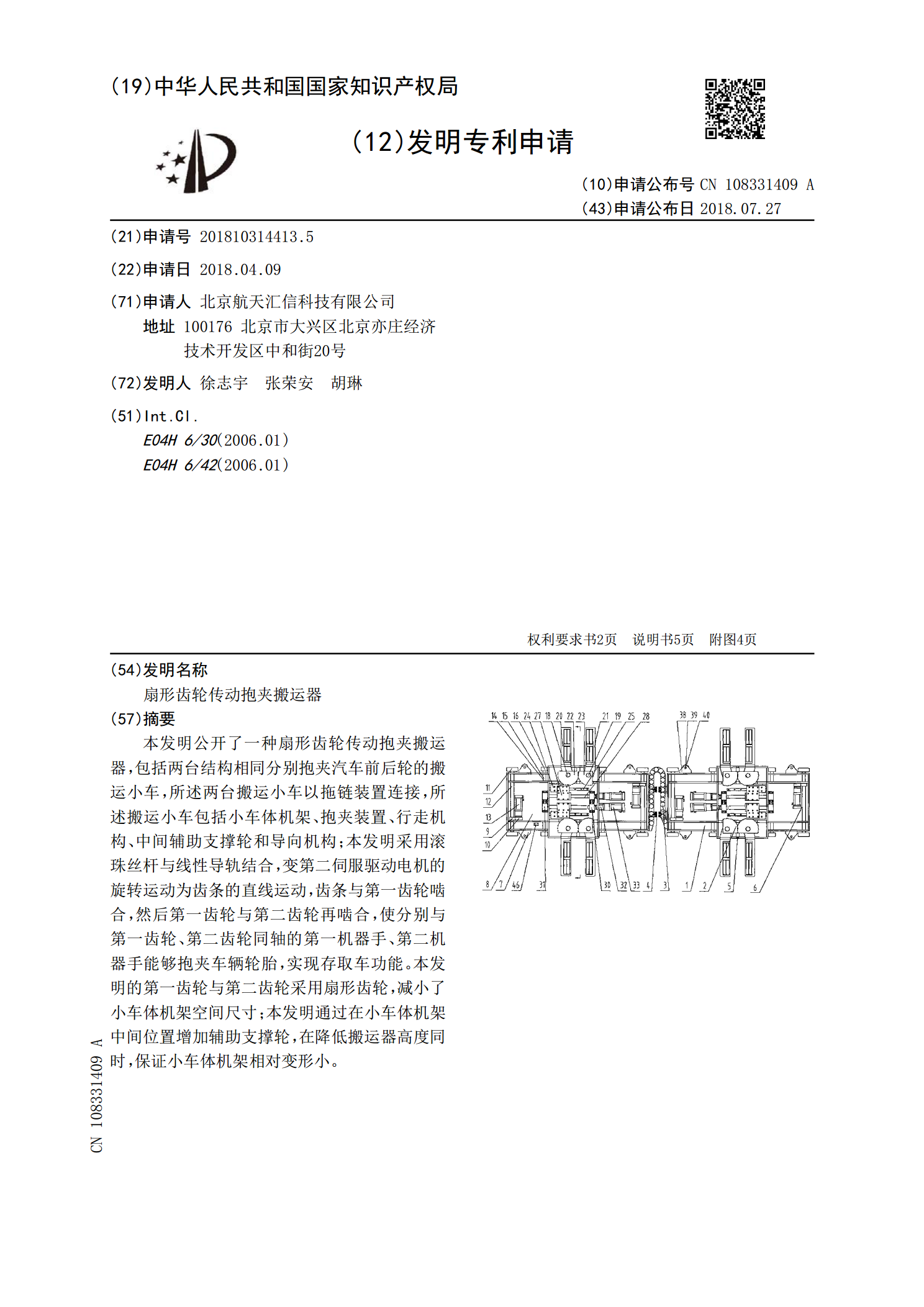
本发明公开了一种扇形齿轮传动抱夹搬运器,包括两台结构相同分别抱夹汽车前后轮的搬运小车,所述两台搬运小车以拖链装置连接,所述搬运小车包括小车体机架、抱夹装置、行走机构、中间辅助支撑轮和导向机构;本发明采用滚珠丝杆与线性导轨结合,变第二伺服驱动电机的旋转运动为齿条的直线运动,齿条与第一齿轮啮合,然后第一齿轮与第二齿轮再啮合,使分别与第一齿轮、第二齿轮同轴的第一机器手、第二机器手能够抱夹车辆轮胎,实现存取车功能。本发明的第一齿轮与第二齿轮采用扇形齿轮,减小了小车体机架空间尺寸;本发明通过在小车体机架中间位置增加