
电动飞机牵引车及其驱动控制系统和方法.pdf

是你****盟主

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动飞机牵引车及其驱动控制系统和方法.pdf
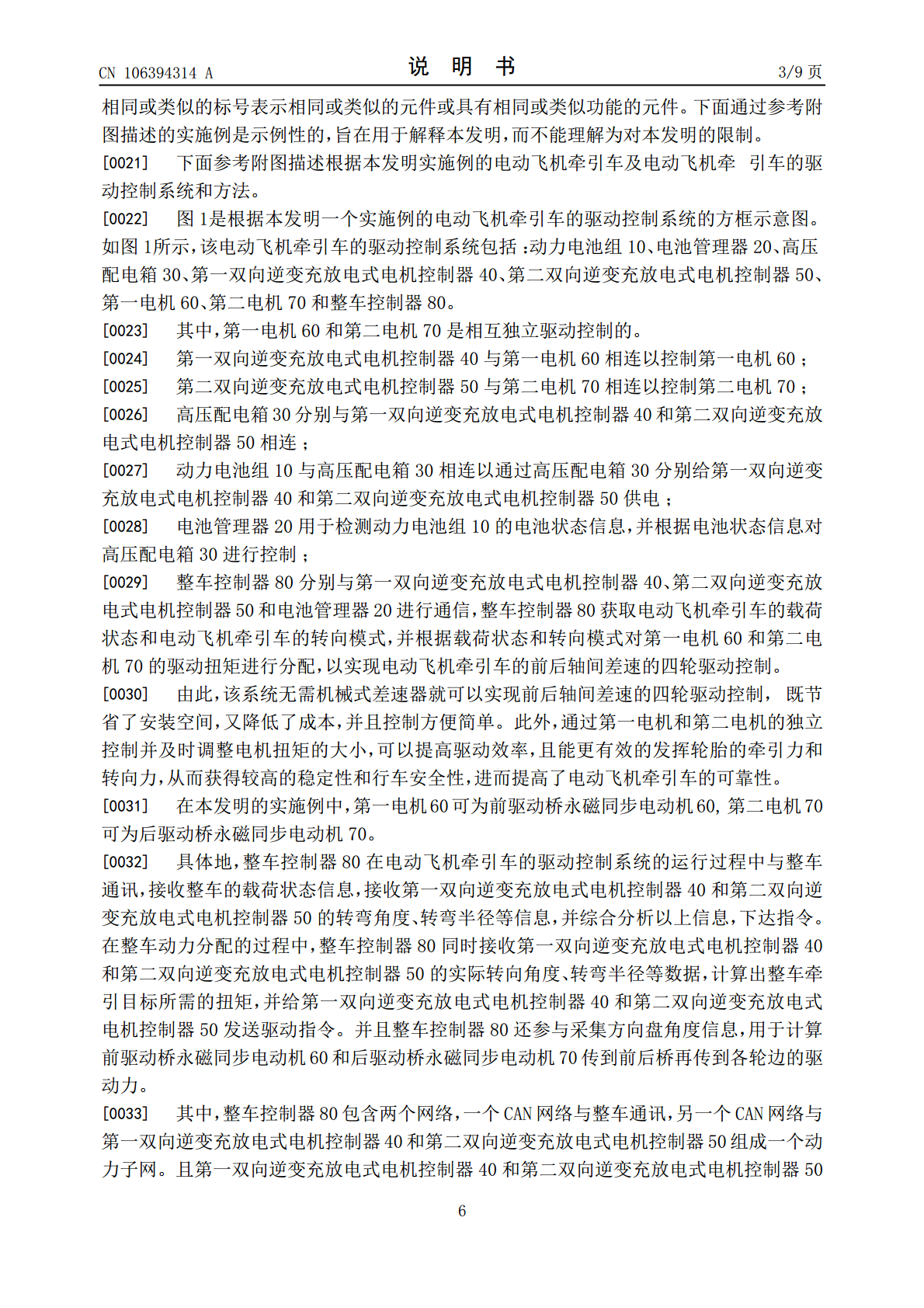
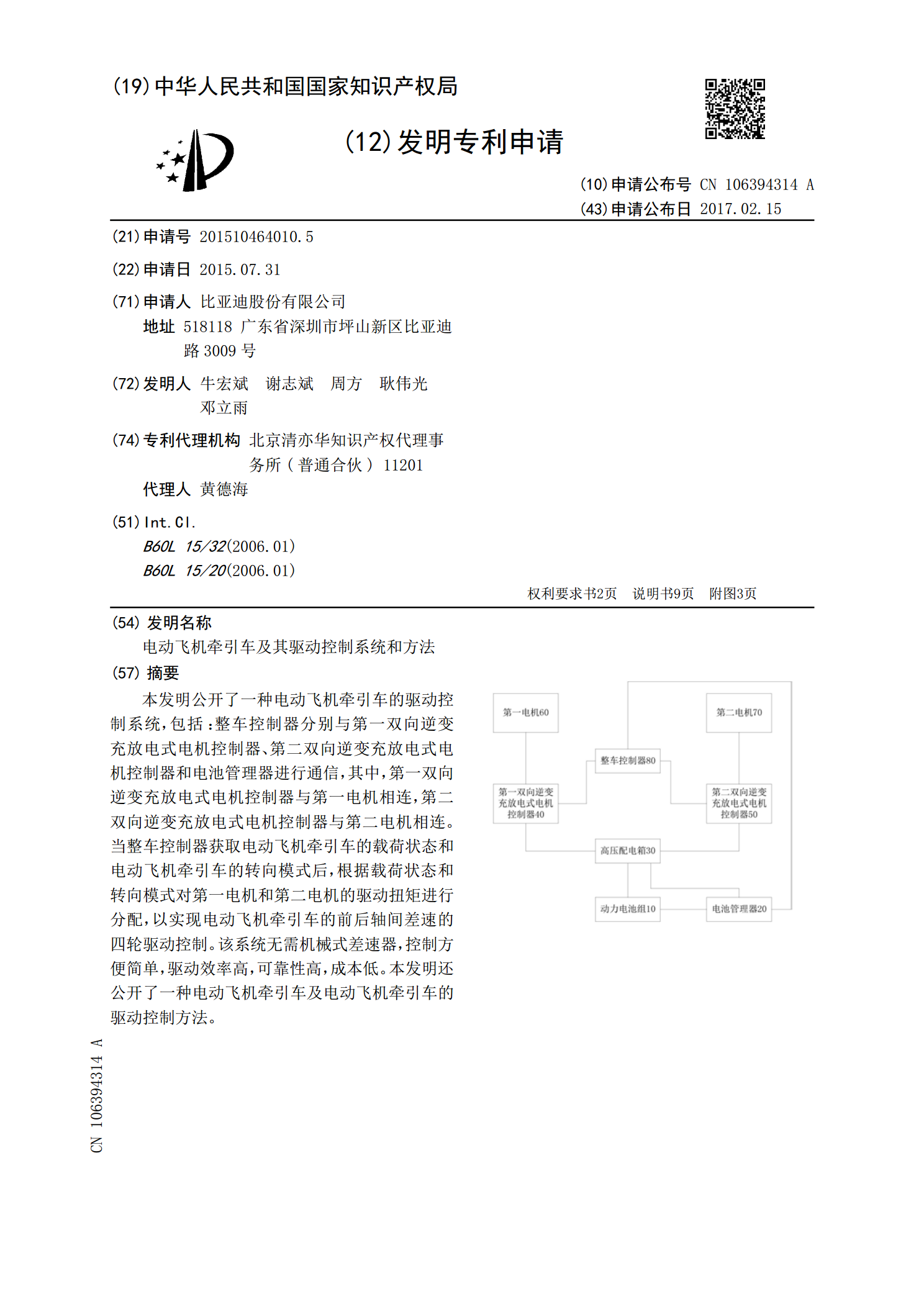
本发明公开了一种电动飞机牵引车的驱动控制系统,包括:整车控制器分别与第一双向逆变充放电式电机控制器、第二双向逆变充放电式电机控制器和电池管理器进行通信,其中,第一双向逆变充放电式电机控制器与第一电机相连,第二双向逆变充放电式电机控制器与第二电机相连。当整车控制器获取电动飞机牵引车的载荷状态和电动飞机牵引车的转向模式后,根据载荷状态和转向模式对第一电机和第二电机的驱动扭矩进行分配,以实现电动飞机牵引车的前后轴间差速的四轮驱动控制。该系统无需机械式差速器,控制方便简单,驱动效率高,可靠性高,成本低。本发明还公

一种电动汽车智能驱动控制系统及其驱动控制方法.pdf
本发明涉及一种电动汽车智能驱动控制系统及驱动控制方法,所述电动汽车包括加速踏板、制动踏板、两个驱动轴、安装在两个驱动轴两端上的带有各自驱动电机的四个电动轮,所述电动汽车智能驱动控制系统包括整车控制器以及分别与整车控制器连接的制动系统控制器、制动踏板角度传感器、加速踏板角度传感器、前测距传感器、后测距传感器、四个轮速传感器和四个驱动电机控制器;本发明驱动控制方法是根据加速踏板角度,自动调整电动汽车单轴或两轴驱动,或自动调整加速度、减速度的大小,或自动判断电动轮汽车是否陷入诸如沙坑、油污路面、塌陷地类的低附着

轴驱电动车辆驱动防滑控制系统及其控制方法.pdf
轴驱电动车辆驱动防滑控制系统及其控制方法属于车辆控制系统技术领域,其特征在于,根据瞬时车速,判断车辆所处的速度区间。在高速阶段采取电机力矩单独控制,保证了车辆的行驶稳定性。在中低速阶段,根据两个驱动轮的滑转率判断车辆所处路面的情况,对车辆采用不同的控制方法。针对对开路面,采用电机力矩与制动力矩协调控制,即采用电机力矩高选控制,同时对低附着一侧驱动轮施加制动力矩干预,保证了车辆的加速能力;针对单一路面采取电机力矩单独控制,即采用电机力矩低选控制,保证了车辆的加速平顺性。
电动叉车及其驱动方法.pdf
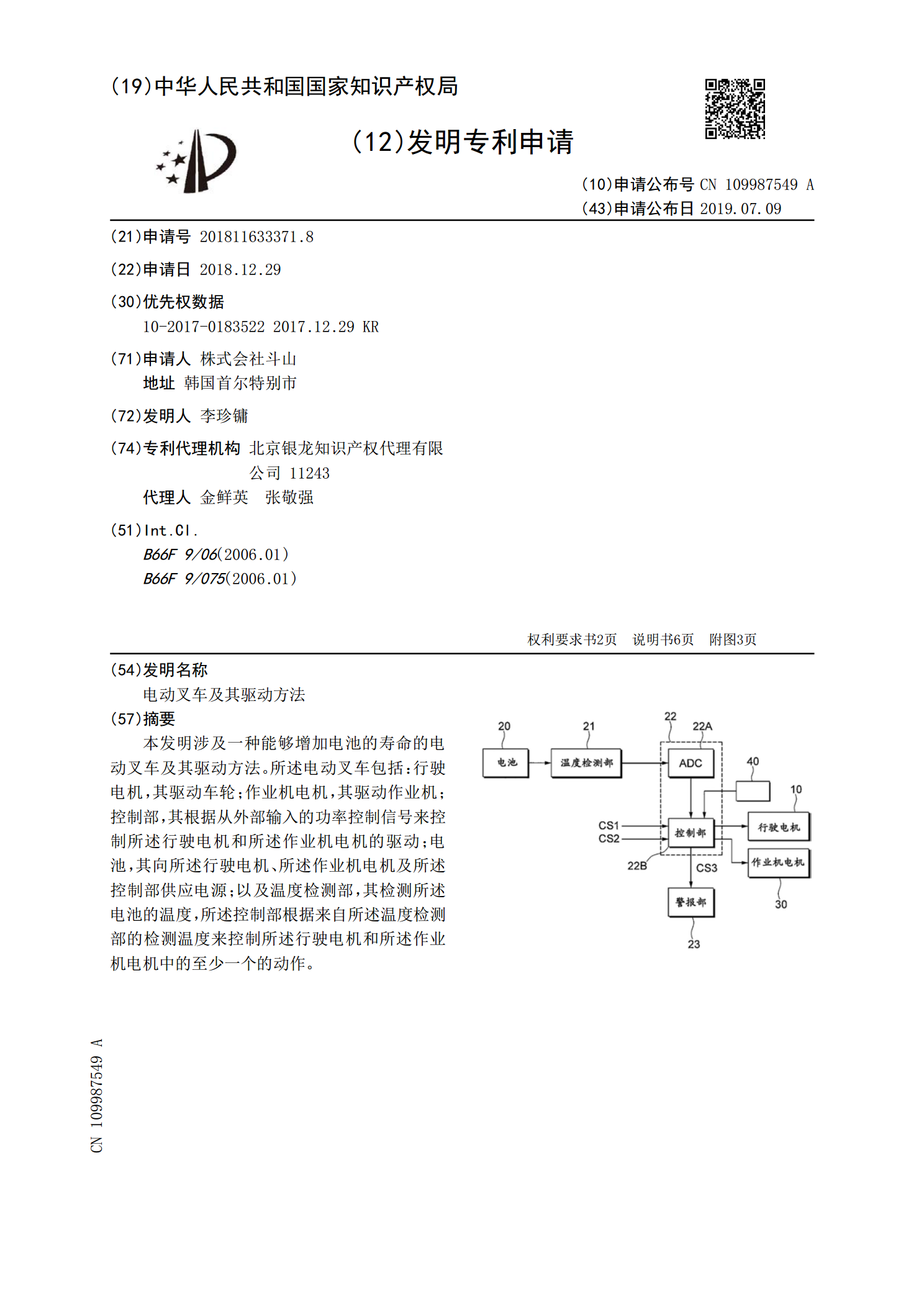
本发明涉及一种能够增加电池的寿命的电动叉车及其驱动方法。所述电动叉车包括:行驶电机,其驱动车轮;作业机电机,其驱动作业机;控制部,其根据从外部输入的功率控制信号来控制所述行驶电机和所述作业机电机的驱动;电池,其向所述行驶电机、所述作业机电机及所述控制部供应电源;以及温度检测部,其检测所述电池的温度,所述控制部根据来自所述温度检测部的检测温度来控制所述行驶电机和所述作业机电机中的至少一个的动作。

单电机前后桥驱动电动牵引车.pdf
本发明公开了单电机前后桥驱动电动牵引车,包括车体、控制装置、方向盘、电池组、前、后桥、前、后轮、牵引物连接装置,其特征在于:所述的前桥和后桥之间设有轴两端做功的功率可调电机,电机的轴前端通过“十”字轴与前桥的差速器驱动轴连接;电机的轴后端通过联轴器与蜗轮蜗杆的蜗杆连接传动,蜗轮蜗杆的蜗轮与后桥的轴固定;前桥的两端上壁设有“T”形滑块,与“T”形滑块的对应位置设有水平电磁推拉装置;联轴器与蜗轮蜗杆的连接部位设有离合器。该牵引车,在保持现有技术的转向、前进、倒退等自动控制的基础上,通过一个电机实现前、后车轮驱