
带钢位置测量装置、带钢跑偏控制装置及计算方法.pdf

长春****主a

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

带钢位置测量装置、带钢跑偏控制装置及计算方法.pdf
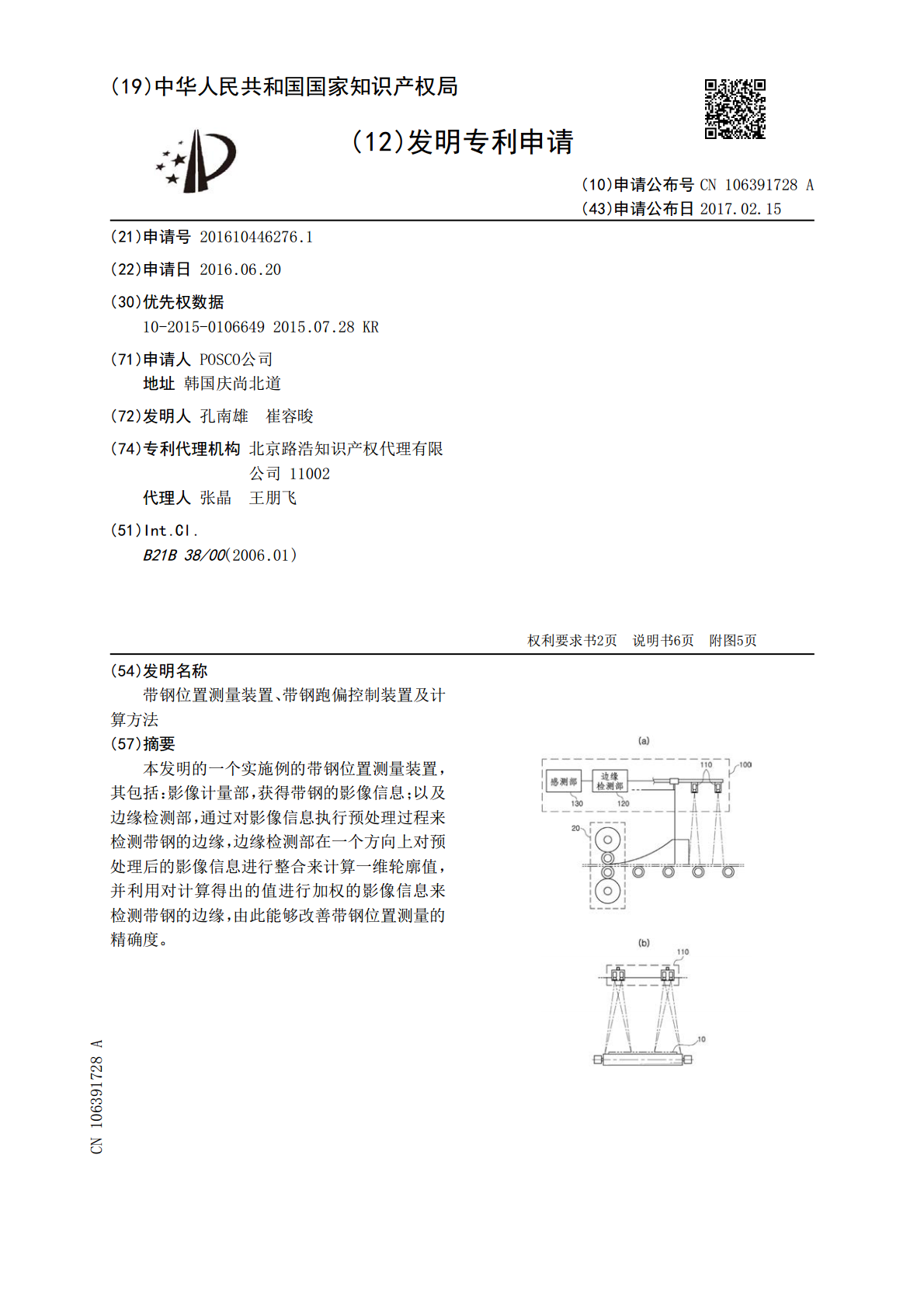
本发明的一个实施例的带钢位置测量装置,其包括:影像计量部,获得带钢的影像信息;以及边缘检测部,通过对影像信息执行预处理过程来检测带钢的边缘,边缘检测部在一个方向上对预处理后的影像信息进行整合来计算一维轮廓值,并利用对计算得出的值进行加权的影像信息来检测带钢的边缘,由此能够改善带钢位置测量的精确度。

一种带钢跑偏控制方法和装置.pdf
本发明公开了一种带钢跑偏控制方法和装置,包括:从目标带钢的多个长度段中确定目标长度段,长度段为沿目标带钢的长度方向确定的带钢段;获取目标长度段中在宽度方向上的第一不对称度数据组;根据第一不对称度数据组,确定目标长度段的第一跑偏概率;当第一跑偏概率超过设定的第一预设阈值时,控制目标长度段在下一个工艺阶段的生产速度降低至预设速度。本申请可以根据在当前工艺阶段中带钢的板形的不对称度,确定带钢的跑偏概率,当带钢的目标长度段很可能跑偏时,则在下一工艺阶段中进行降速处理,进而降低带钢跑偏的几率,也就降低了限速事故和断
一种避免带钢跑偏的方法及装置.pdf
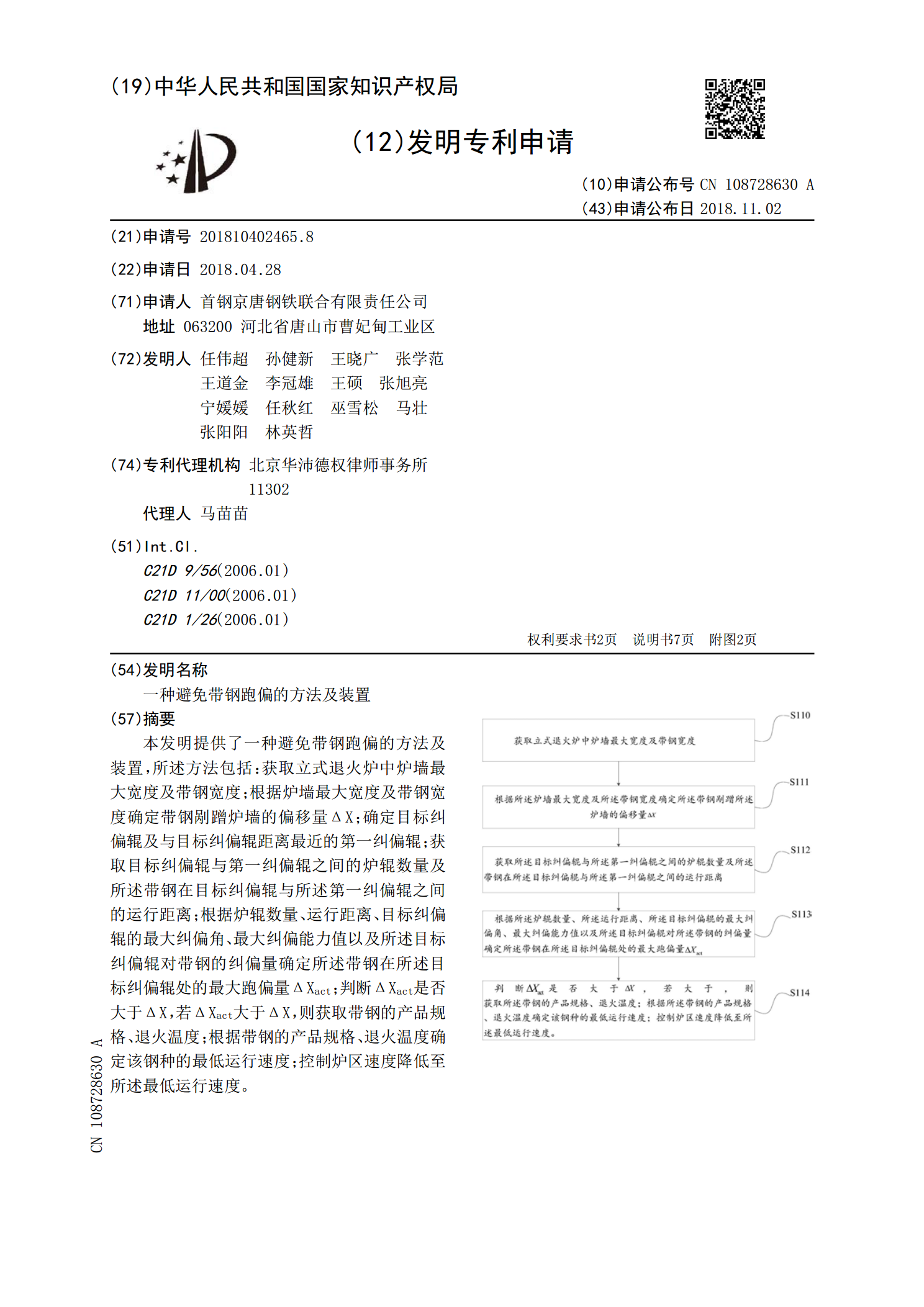
本发明提供了一种避免带钢跑偏的方法及装置,所述方法包括:获取立式退火炉中炉墙最大宽度及带钢宽度;根据炉墙最大宽度及带钢宽度确定带钢剐蹭炉墙的偏移量ΔX;确定目标纠偏辊及与目标纠偏辊距离最近的第一纠偏辊;获取目标纠偏辊与第一纠偏辊之间的炉辊数量及所述带钢在目标纠偏辊与所述第一纠偏辊之间的运行距离;根据炉辊数量、运行距离、目标纠偏辊的最大纠偏角、最大纠偏能力值以及所述目标纠偏辊对带钢的纠偏量确定所述带钢在所述目标纠偏辊处的最大跑偏量ΔX

圆盘剪前带钢跑偏原因分析及纠偏装置改造.docx
圆盘剪前带钢跑偏原因分析及纠偏装置改造一、引言圆盘剪是一种常用的金属加工设备,在钢铁、机械、船舶等行业得到广泛应用。圆盘剪的辊式导向机构是其中重要的组成部分,保证了厚度一致的钢板切割。然而,在实际应用中,由于各种原因,会出现圆盘剪前带钢跑偏的现象,导致切割误差、生产效率下降、设备安全隐患等问题。因此,本文将从跑偏原因和纠偏装置改造两方面对圆盘剪前带钢跑偏进行深入研究和探讨,以期提高设备的稳定性和效率。二、圆盘剪前带钢跑偏原因分析1.设备结构问题(1)辊式导向机构间隙过大或过小。如果间隙过大,会使得带钢在导

带钢跑偏怎么调 [连续带钢彩涂生产线跑偏原因分析及改造].docx
带钢跑偏怎么调[连续带钢彩涂生产线跑偏原因分析及改造]摘要:福建省明光新型材料有限公司连续带钢彩涂生产线精涂水淬出口位置CPC纠偏效果不佳,从力学角度分析了带钢跑偏的原因,并以此对精涂水淬出口位置CPC纠偏进行改造。通过改造,大幅度减少该位置跑偏的次数与设备停机时间及产品废品率,提高了整条生产线的产量、质量及设备安全。关键词:带钢跑偏纠偏系统纠偏原理中图分类号:TG33文献标识码:A文章编号:1007-3973(2012)006-055-021前言福建省明光新型材料有限公司连续带钢彩涂生产线,由北京钢铁设