
一种平夹自适应三指欠驱动机器人手.pdf

飞飙****ng

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种平夹自适应三指欠驱动机器人手.pdf
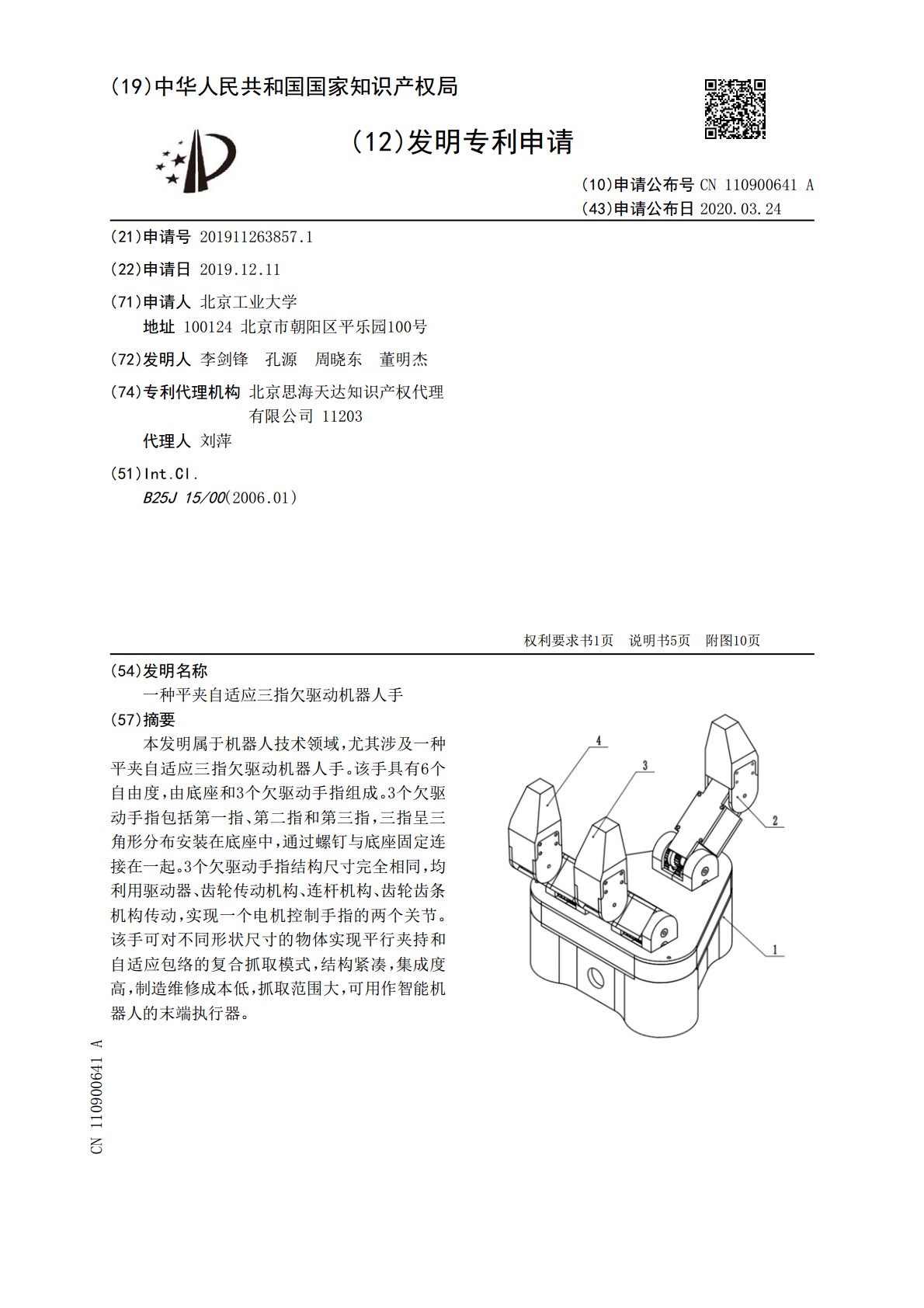
本发明属于机器人技术领域,尤其涉及一种平夹自适应三指欠驱动机器人手。该手具有6个自由度,由底座和3个欠驱动手指组成。3个欠驱动手指包括第一指、第二指和第三指,三指呈三角形分布安装在底座中,通过螺钉与底座固定连接在一起。3个欠驱动手指结构尺寸完全相同,均利用驱动器、齿轮传动机构、连杆机构、齿轮齿条机构传动,实现一个电机控制手指的两个关节。该手可对不同形状尺寸的物体实现平行夹持和自适应包络的复合抓取模式,结构紧凑,集成度高,制造维修成本低,抓取范围大,可用作智能机器人的末端执行器。
双环旋转多指平夹自适应欠驱动机器人手装置.pdf
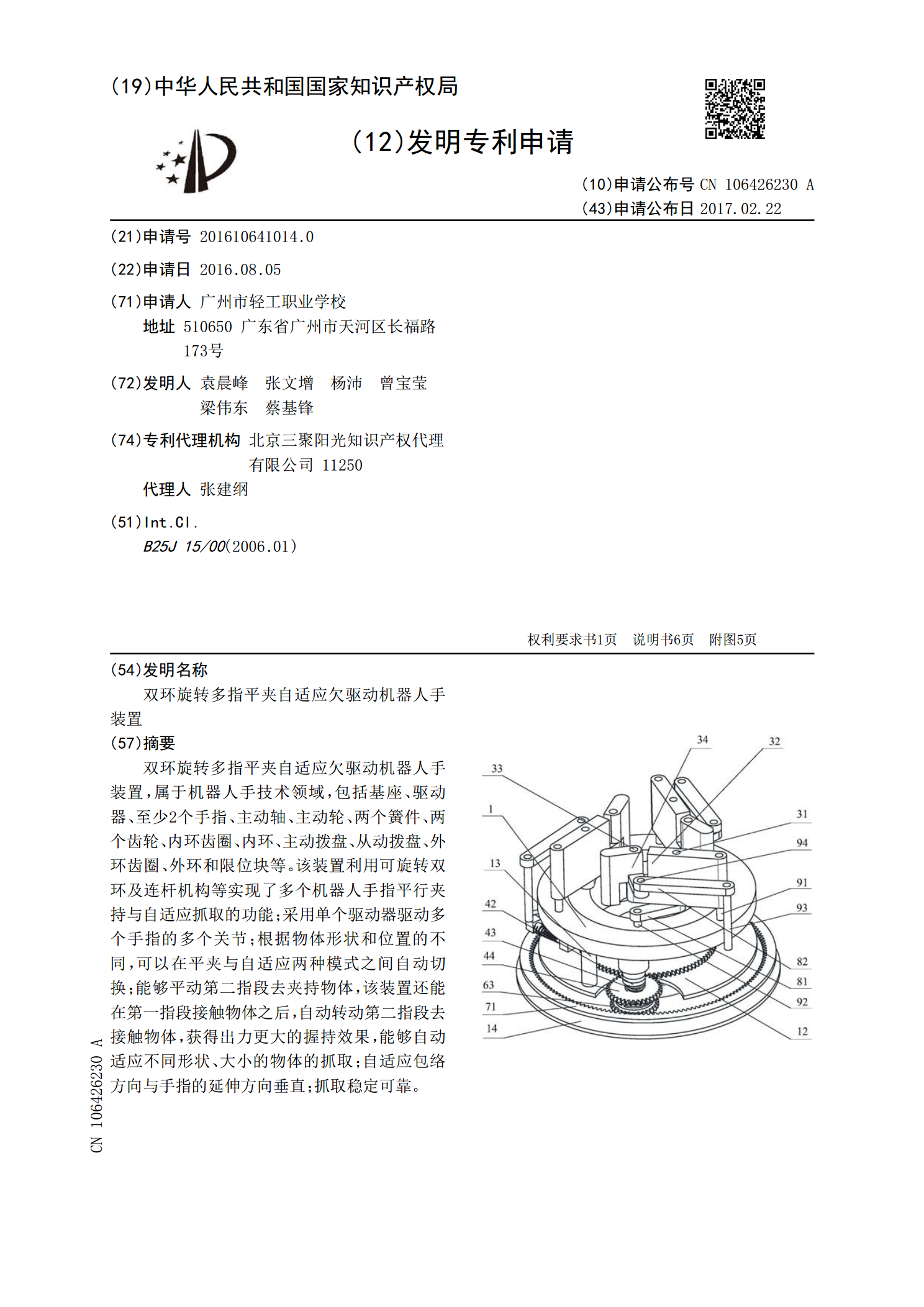
双环旋转多指平夹自适应欠驱动机器人手装置,属于机器人手技术领域,包括基座、驱动器、至少2个手指、主动轴、主动轮、两个簧件、两个齿轮、内环齿圈、内环、主动拨盘、从动拨盘、外环齿圈、外环和限位块等。该装置利用可旋转双环及连杆机构等实现了多个机器人手指平行夹持与自适应抓取的功能;采用单个驱动器驱动多个手指的多个关节;根据物体形状和位置的不同,可以在平夹与自适应两种模式之间自动切换;能够平动第二指段去夹持物体,该装置还能在第一指段接触物体之后,自动转动第二指段去接触物体,获得出力更大的握持效果,能够自动适应不同形

空程双驱动平夹耦合自适应机器人手指装置.pdf
空程双驱动平夹耦合自适应机器人手指装置,属于机器人手技术领域,包括两个指段、两个关节轴、两个电机、多个齿轮、两个拨轮、两个拨盘、三个簧件等。该装置具有平夹、耦合、自适应和钩取四种抓取模式:1)平夹抓取:在抓取过程中,该装置始终保持末端的第二指段相对于基座不变的姿态,达到第二指段平夹抓取的效果;2)耦合抓取:能做到两关节同时正向运动,抓取过程拟人,抓取快速;3)自适应抓取:如果物体先接触第一指段,该装置会自动转入自适应抓取模式,达到对不同形状、尺寸物体均适应的功能;4)钩取:可单独转动第二指段,实现钩取。该

形状自适应欠驱动机器人手爪毕业(设计)论文.doc
哈尔滨工业大学本科毕业设计(论文)37毕业设计(论文)题目形状自适应欠驱动机器人手爪的设计与分析专业机械设计制造及其自动化学号学生指导教师答辩日期摘要随着科学技术的发展,工业机器人领域的自动化程度越来越高,机器人在工业自动化中的应用也愈加普遍。目前,传统工业机器人的末端夹持装置存在着灵活性差,抓取精度低,稳定性、可靠性和通用性差,没有可靠的输出力控制,无法达到FMS生产线上对于灵活和精细操作的要求。为此,本文根据国内外的新型欠驱动机构的研究现状,结合本课题的具体要求,对具有形状自适应的欠驱动机器人手爪进行

齿条止回自适应欠驱动机器人手指装置.pdf
齿条止回自适应欠驱动机器人手指装置,属于机器人手技术领域,包括基座、电机、第一传动机构、近关节轴、中部指段、主动齿轮、齿条、从动齿轮、远关节轴、末端指段和第一簧件。该装置还包括第二传动机构、棘爪、棘爪轴、棘轮、第二簧件、第三簧件和第四簧件。该装置可以安装到机械臂上,配合机械臂的主动运动实施反作用面撤离的物体抓取,具有对所抓物体的形状、大小的自适应能力,抓取物体达到形状封闭和力封闭的稳定抓取,防止在抓取过程中因为振动干扰导致关节回复的失稳现象,该装置结构简单,体积小,质量小,制造和维护成本低,与人手的手指相