
轮对踏面径向跳动误差的自动测量方法.pdf

努力****向丝

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮对踏面径向跳动误差的自动测量方法.pdf
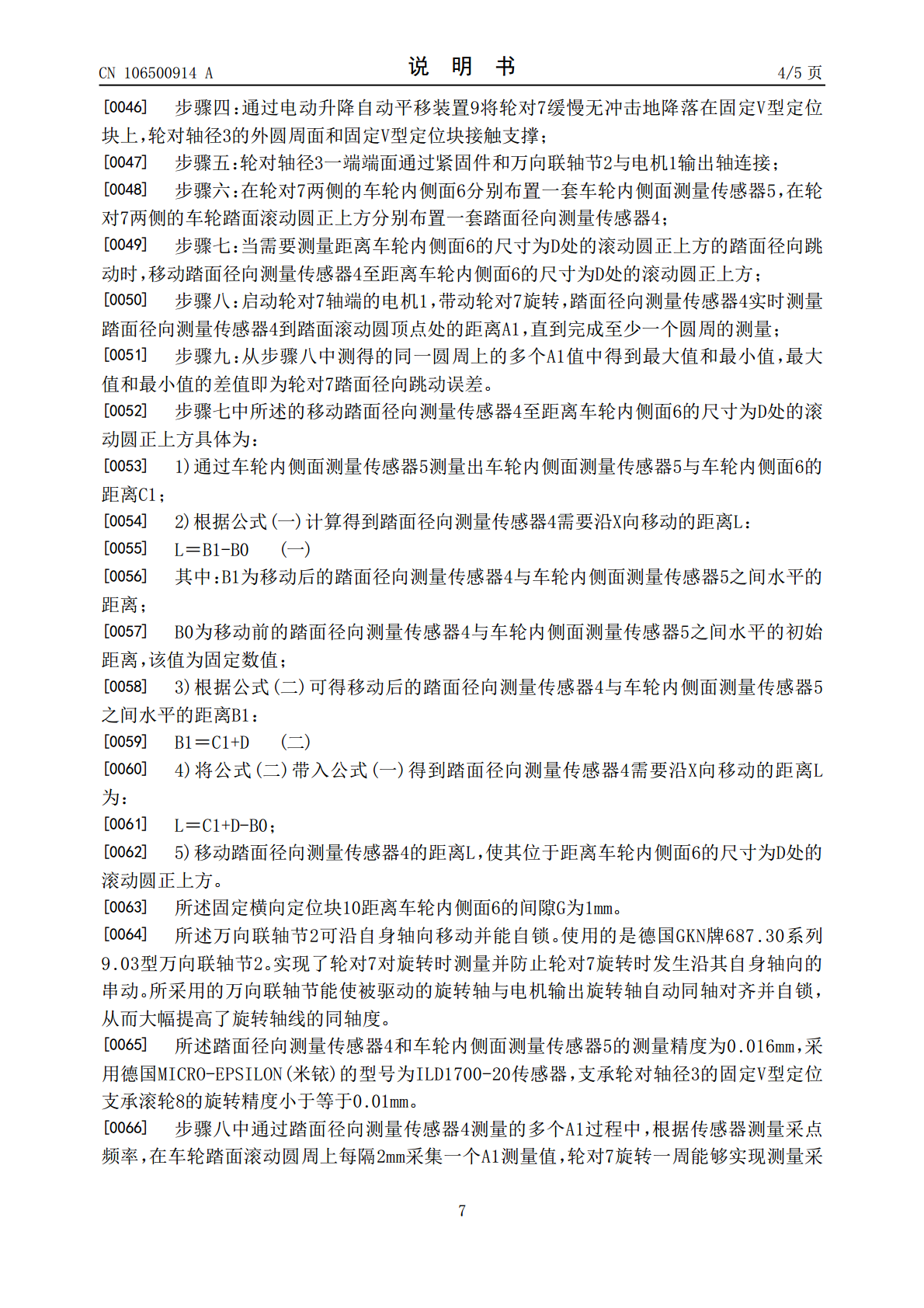
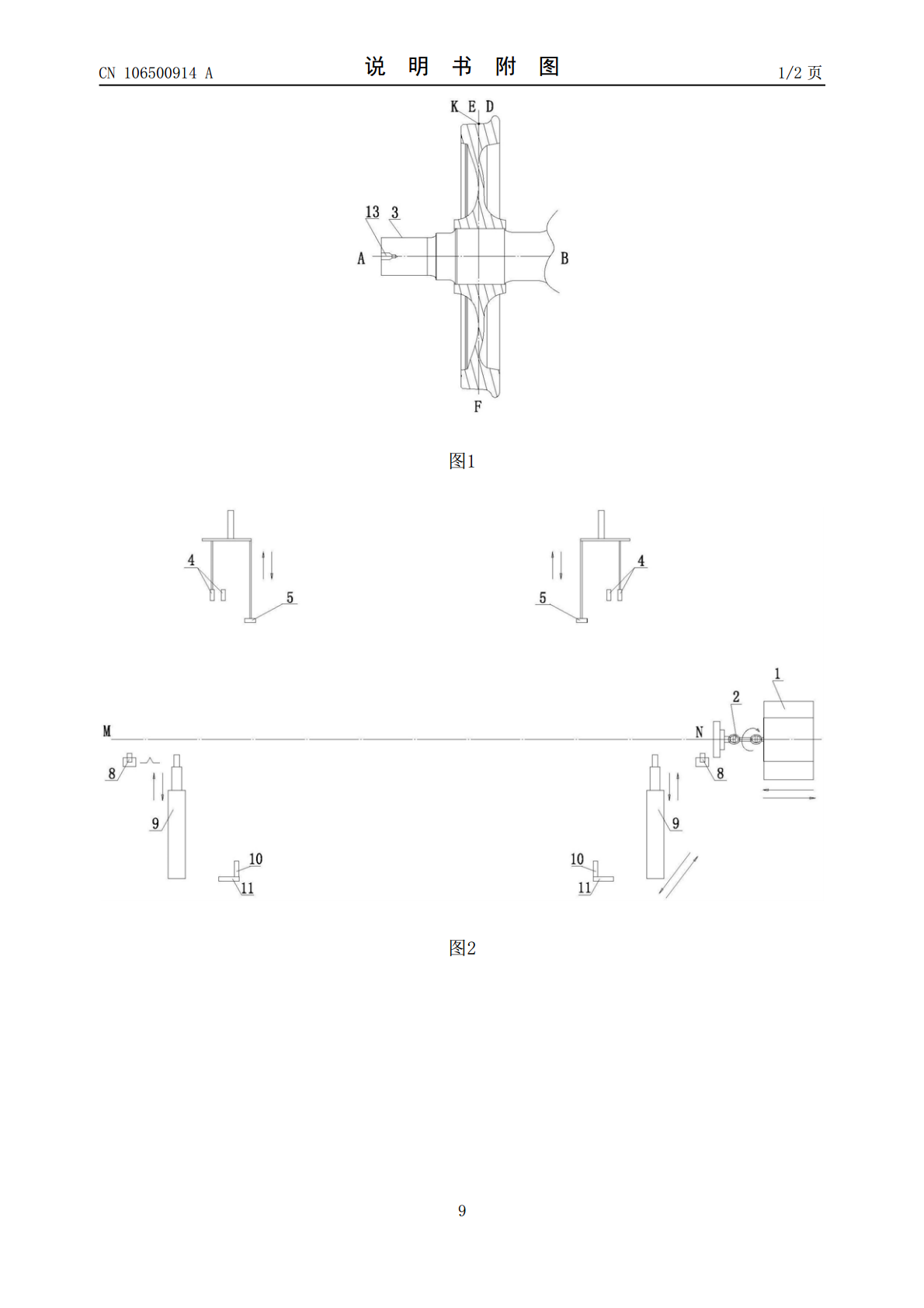
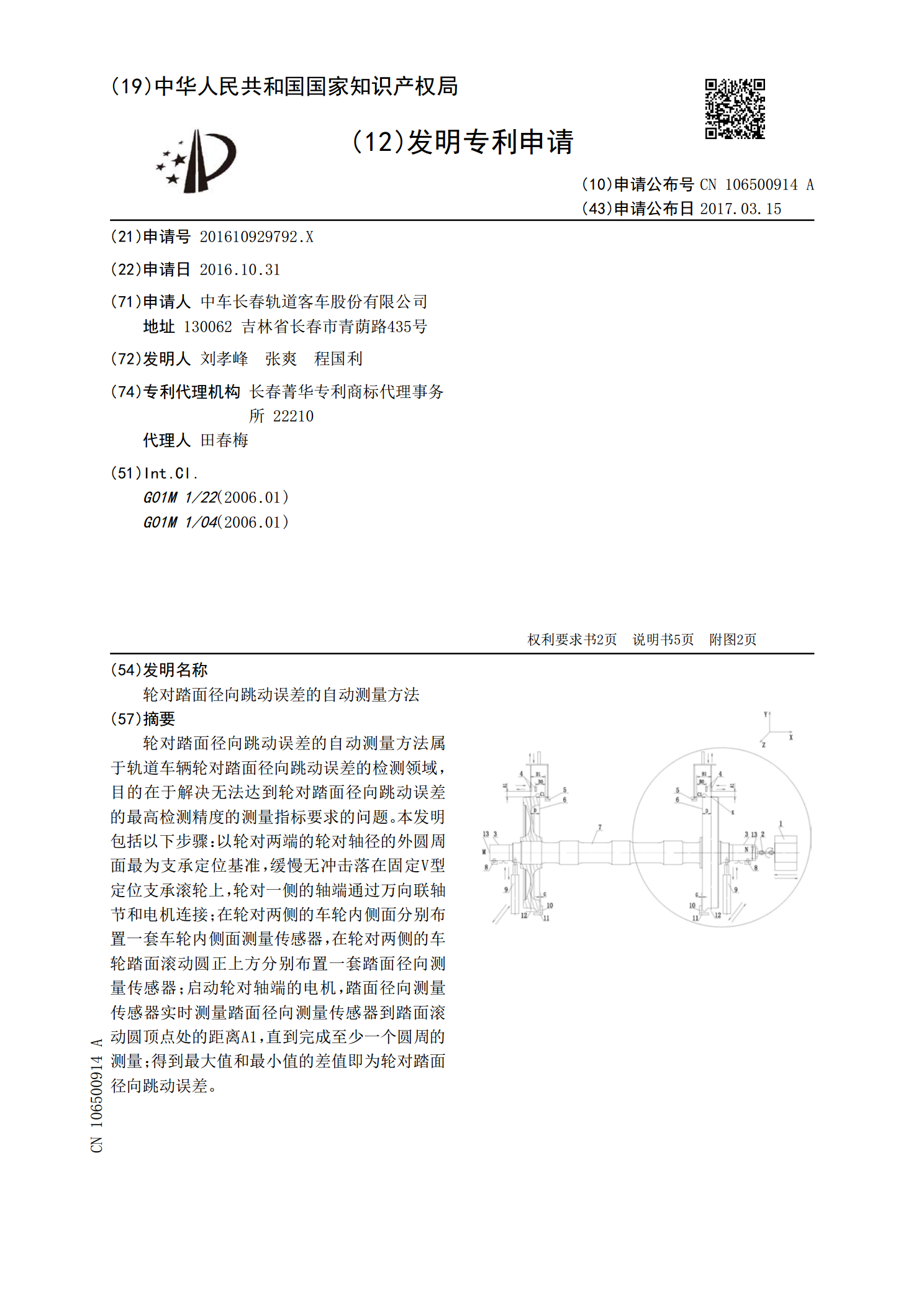
轮对踏面径向跳动误差的自动测量方法属于轨道车辆轮对踏面径向跳动误差的检测领域,目的在于解决无法达到轮对踏面径向跳动误差的最高检测精度的测量指标要求的问题。本发明包括以下步骤:以轮对两端的轮对轴径的外圆周面最为支承定位基准,缓慢无冲击落在固定V型定位支承滚轮上,轮对一侧的轴端通过万向联轴节和电机连接;在轮对两侧的车轮内侧面分别布置一套车轮内侧面测量传感器,在轮对两侧的车轮踏面滚动圆正上方分别布置一套踏面径向测量传感器;启动轮对轴端的电机,踏面径向测量传感器实时测量踏面径向测量传感器到踏面滚动圆顶点处的距离A

基于图像的轮对踏面轮廓测量方法.docx
基于图像的轮对踏面轮廓测量方法基于图像的轮对踏面轮廓测量方法摘要:轮对是铁路车辆中重要的组成部分之一,其踏面的状况直接影响到行车安全和铁路设施的使用寿命。传统的轮对踏面轮廓测量方法需要专用设备和人工操作,且效率低下。本文则提出了一种基于图像的轮对踏面轮廓测量方法,利用计算机视觉技术和图像处理算法实现自动化测量,提高了测量精度和效率。通过实验验证了该方法的可行性和准确性。关键词:轮对;踏面轮廓;图像处理;计算机视觉;测量方法1.引言轮对是铁路车辆中重要的组成部分之一,负责支撑车体和传递车辆重量。由于长期的使
列车轮对踏面三维轮廓自动化测量方法和系统.pdf
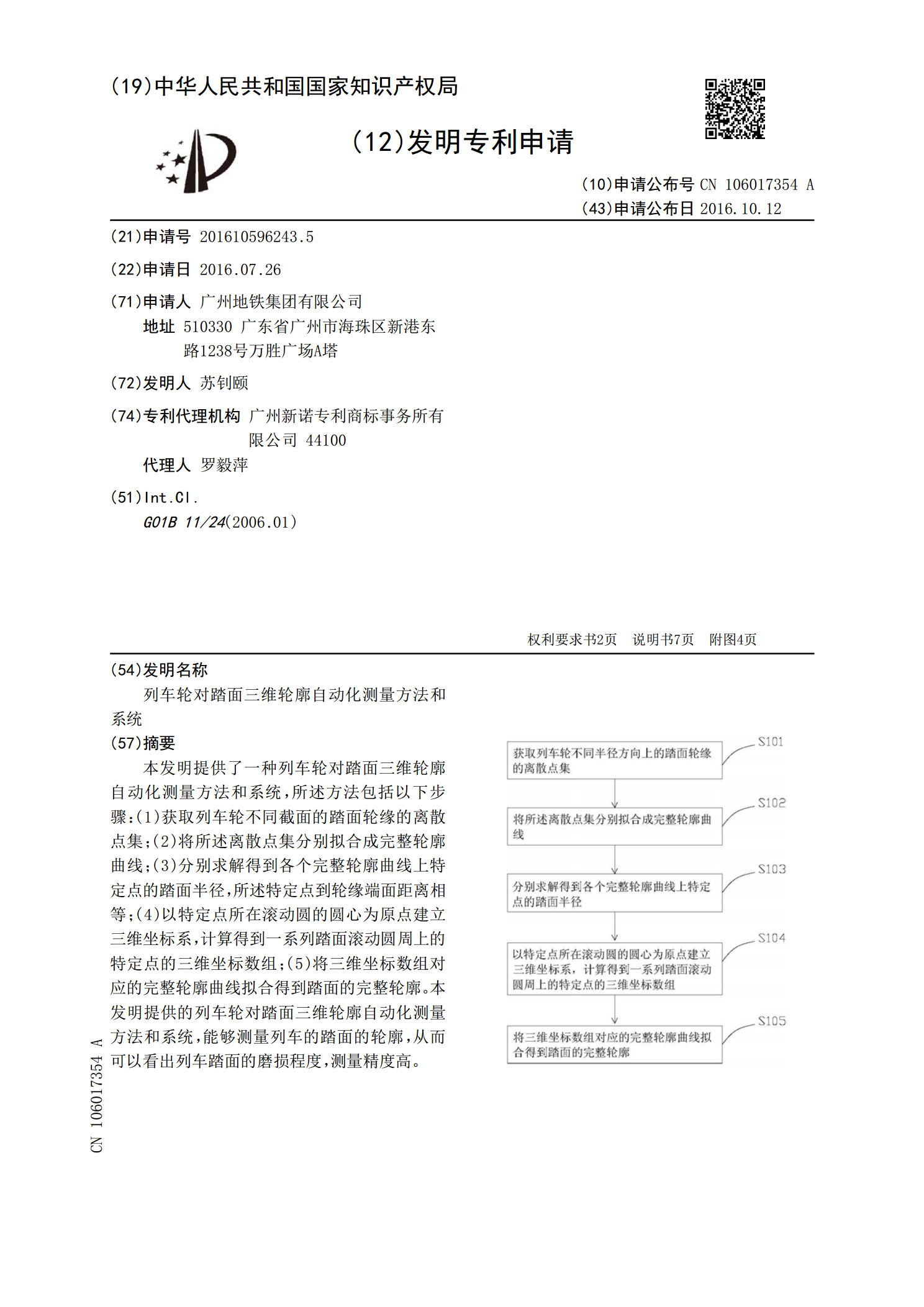
本发明提供了一种列车轮对踏面三维轮廓自动化测量方法和系统,所述方法包括以下步骤:(1)获取列车轮不同截面的踏面轮缘的离散点集;(2)将所述离散点集分别拟合成完整轮廓曲线;(3)分别求解得到各个完整轮廓曲线上特定点的踏面半径,所述特定点到轮缘端面距离相等;(4)以特定点所在滚动圆的圆心为原点建立三维坐标系,计算得到一系列踏面滚动圆周上的特定点的三维坐标数组;(5)将三维坐标数组对应的完整轮廓曲线拟合得到踏面的完整轮廓。本发明提供的列车轮对踏面三维轮廓自动化测量方法和系统,能够测量列车的踏面的轮廓,从而可以看
列车轮对踏面标准滚动圆廓形自动化测量方法和系统.pdf
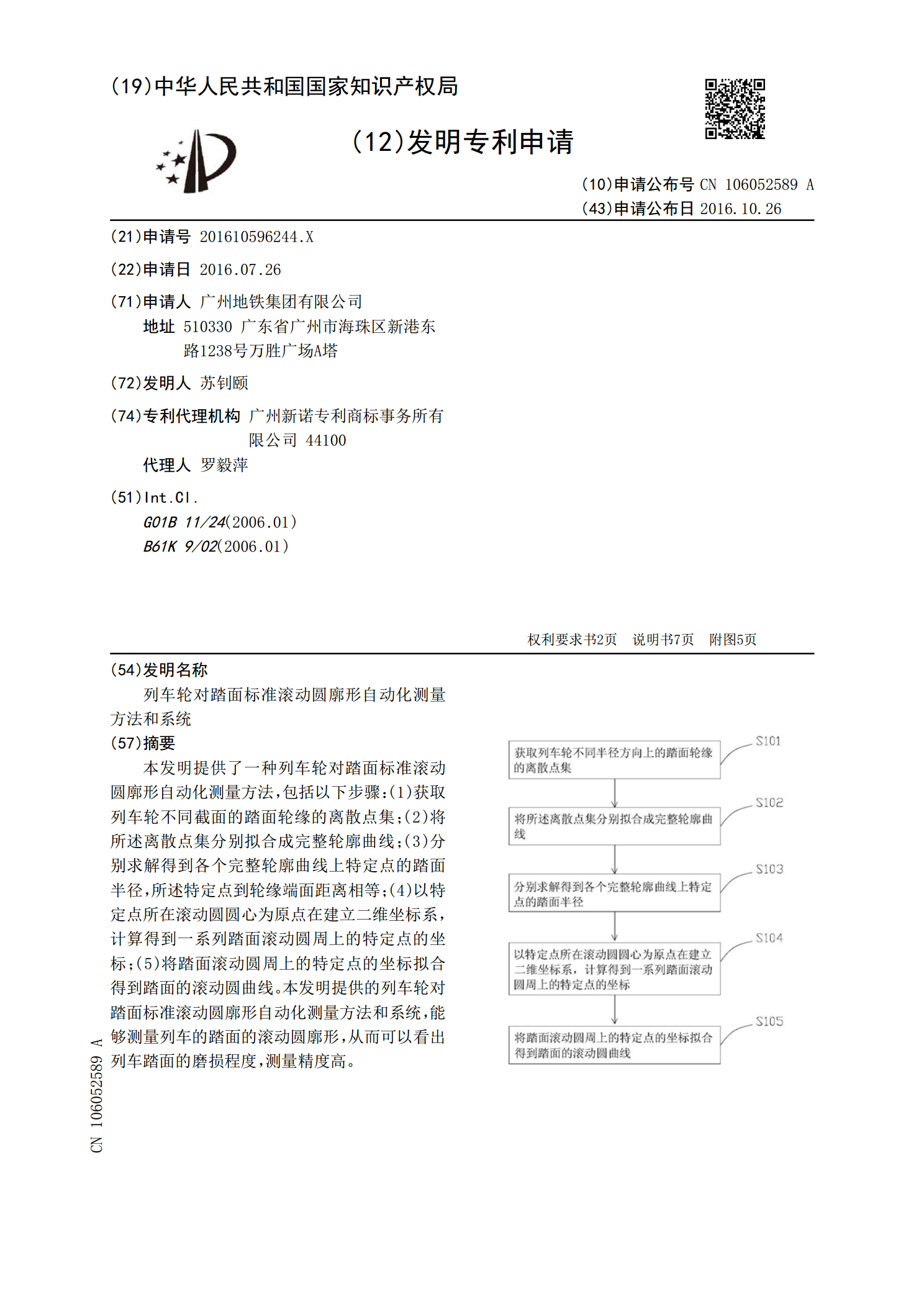
本发明提供了一种列车轮对踏面标准滚动圆廓形自动化测量方法,包括以下步骤:(1)获取列车轮不同截面的踏面轮缘的离散点集;(2)将所述离散点集分别拟合成完整轮廓曲线;(3)分别求解得到各个完整轮廓曲线上特定点的踏面半径,所述特定点到轮缘端面距离相等;(4)以特定点所在滚动圆圆心为原点在建立二维坐标系,计算得到一系列踏面滚动圆周上的特定点的坐标;(5)将踏面滚动圆周上的特定点的坐标拟合得到踏面的滚动圆曲线。本发明提供的列车轮对踏面标准滚动圆廓形自动化测量方法和系统,能够测量列车的踏面的滚动圆廓形,从而可以看出列

齿轮齿圈径向跳动误差自动检测系统的设计.doc
济南大学毕业设计--1前言1.1齿轮齿圈径向跳动误差齿圈径向跳动误差△Fr是指在齿轮一转范围内,测头在齿槽内或在轮齿上,于齿高中部双面接触,测头相对齿轮轴线的最大变动量.1.2国内外研究现状1.2.1发展过程近年来我国汽车、摩托车制造业的迅速发展,汽摩齿轮制造业也得到了空前快速的发展。我国齿轮制造业的总体发展战略是尽快成为汽摩齿轮的全球制造与供应基地,并已经成为我国众多齿轮制造商的共识。齿轮在汽车行业中的需求量很大,且精度要求较高,尤其是用于汽车驱动桥的弧齿锥齿轮的加工工艺