
四驱车辆的控制方法、系统及四驱车辆.pdf

Ma****57

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四驱车辆的控制方法、系统及四驱车辆.pdf
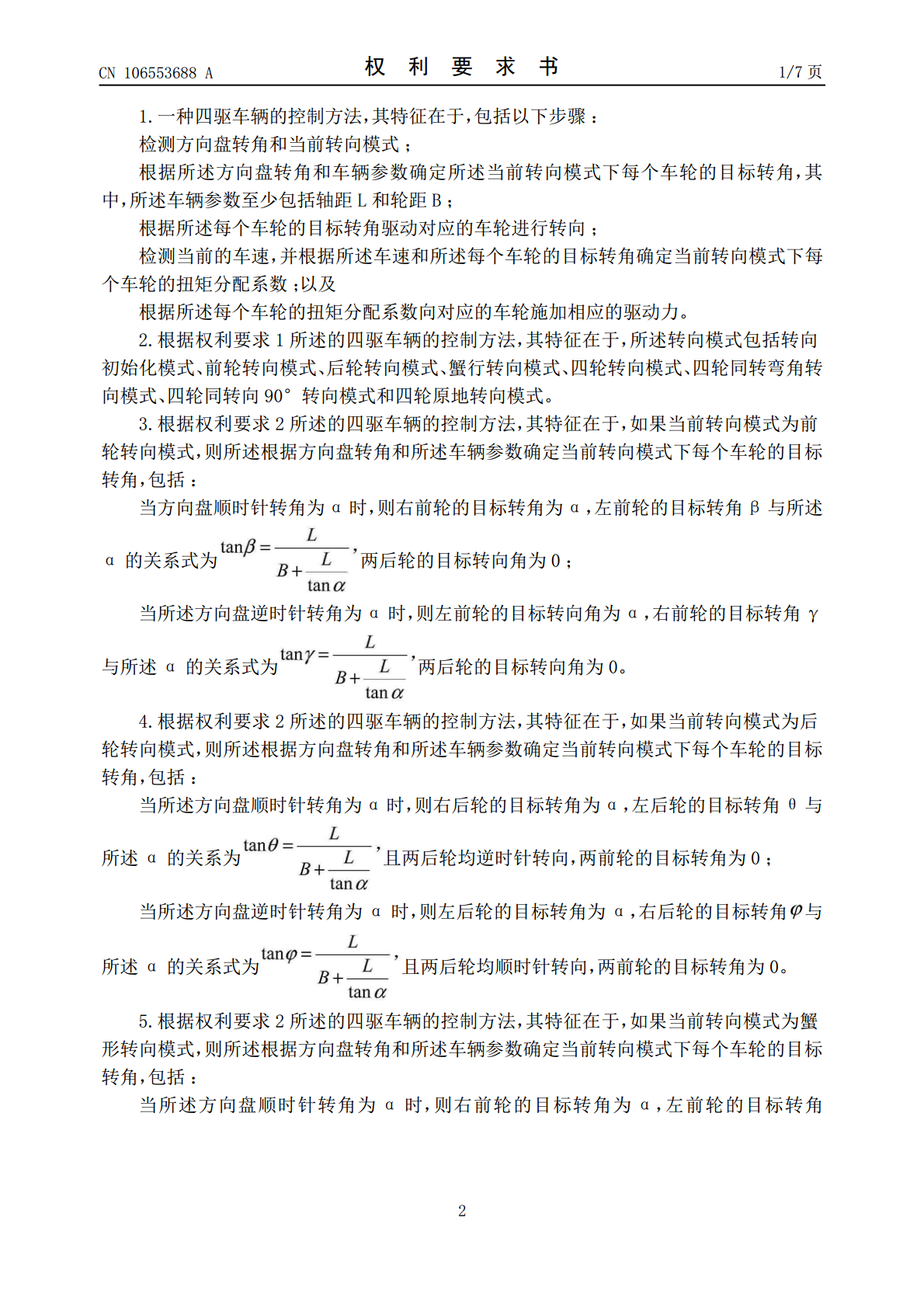
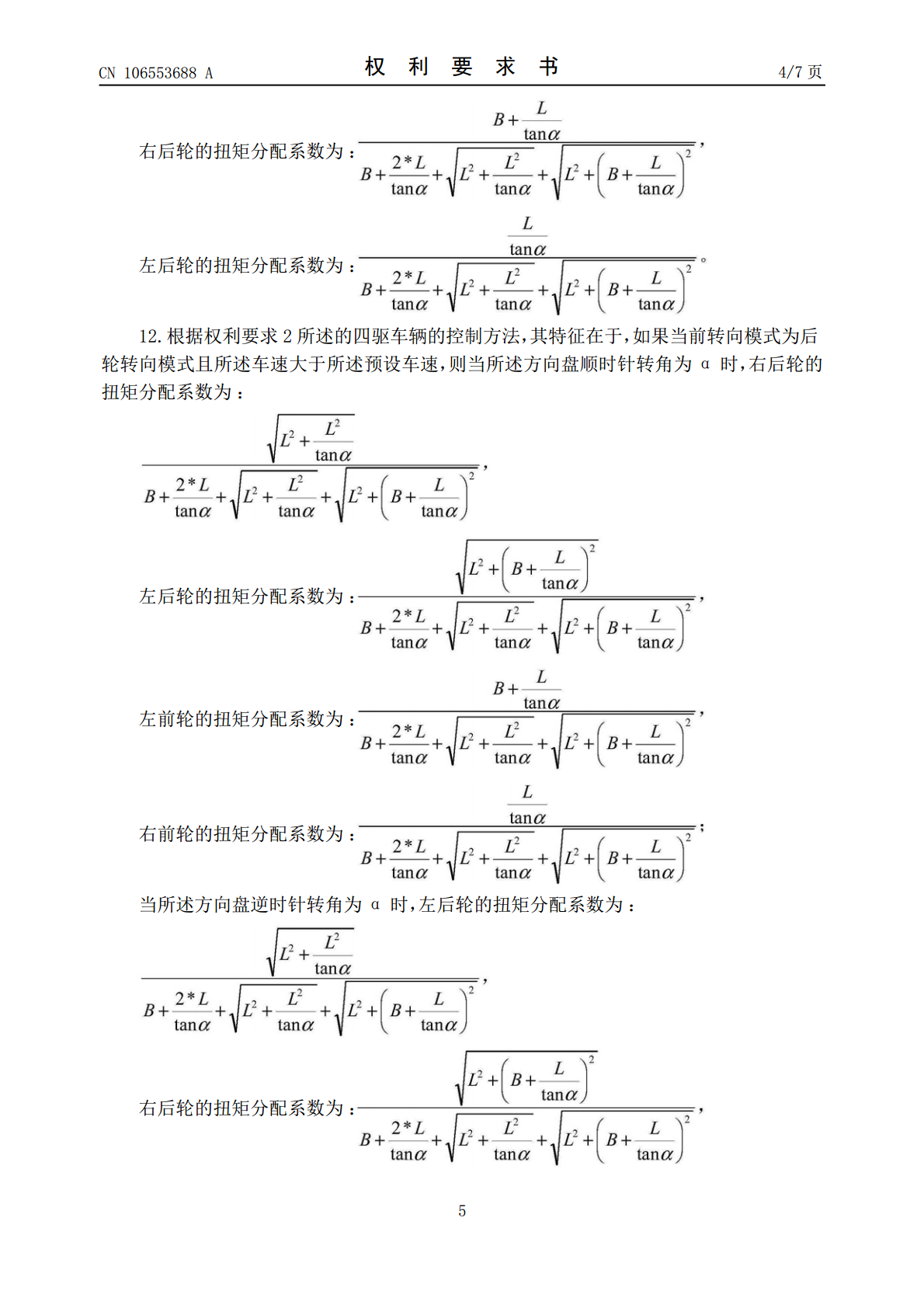
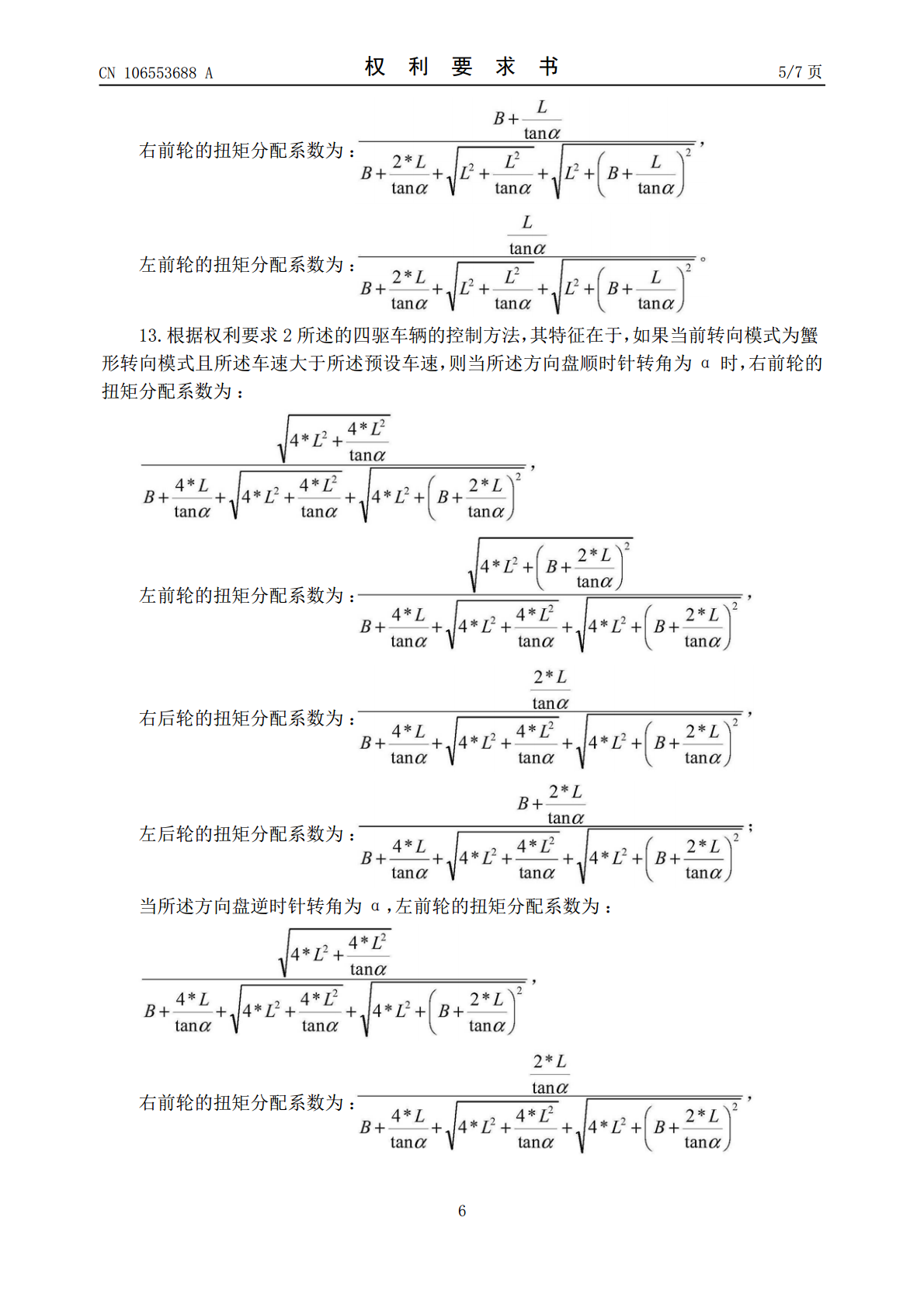
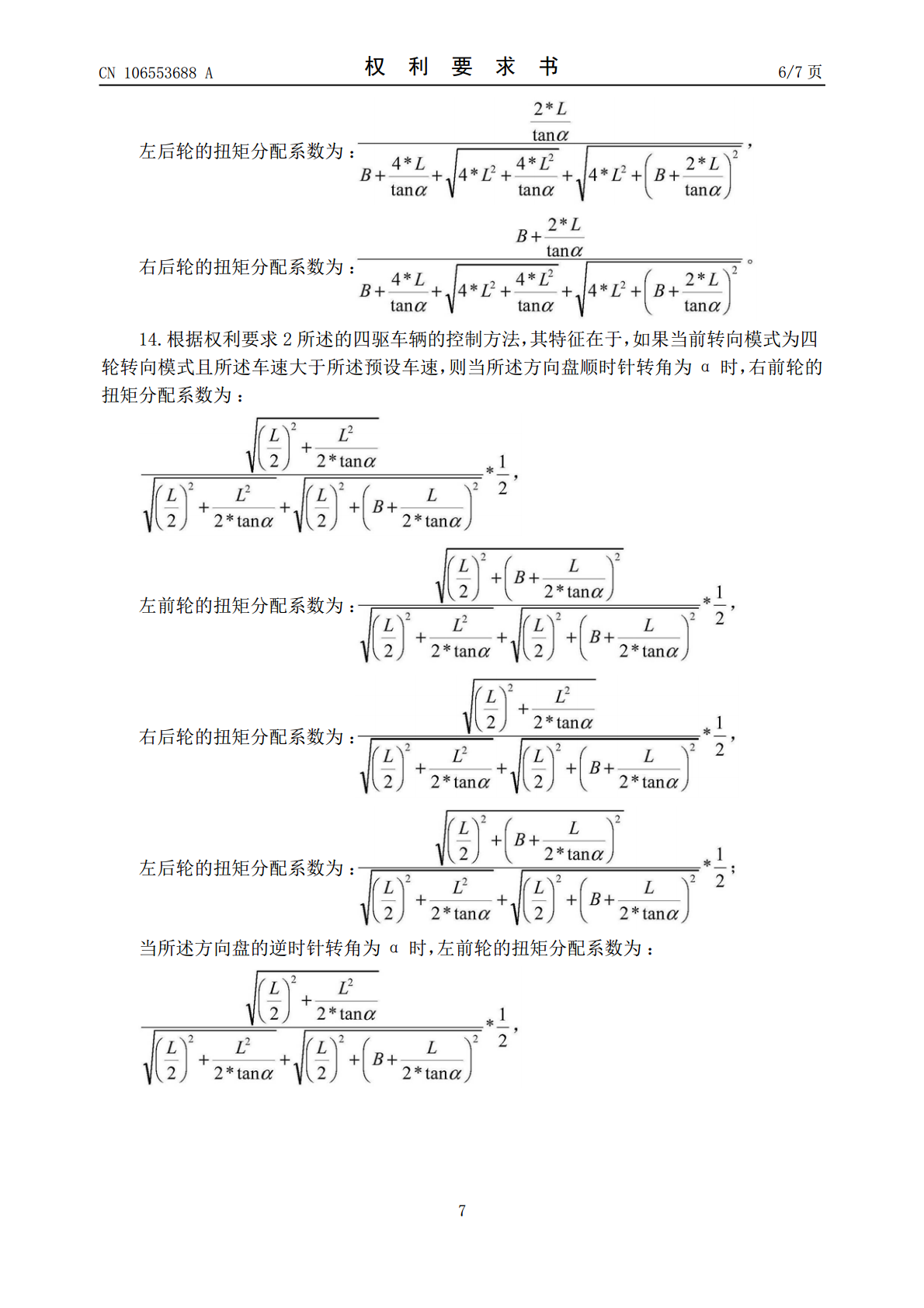
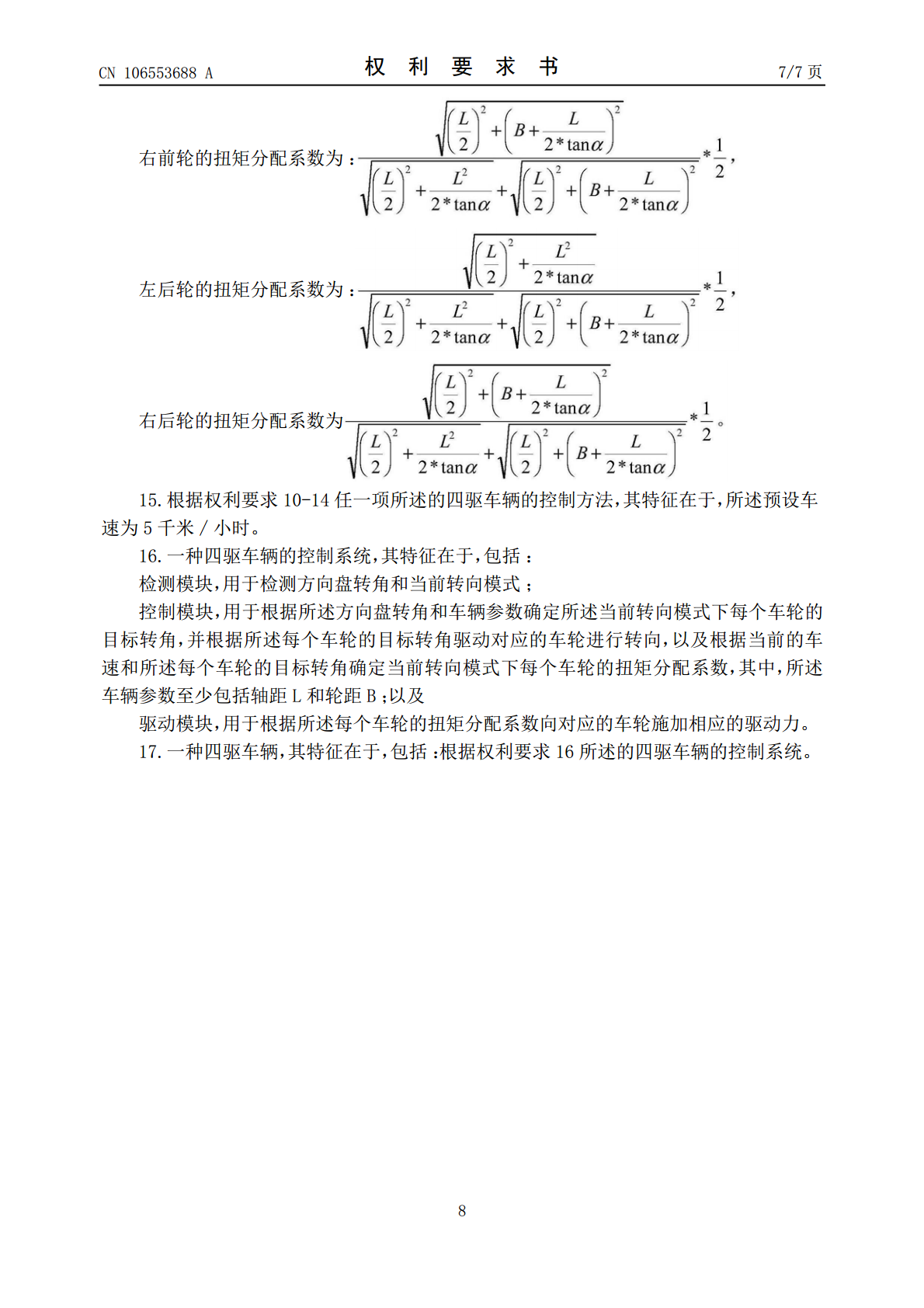
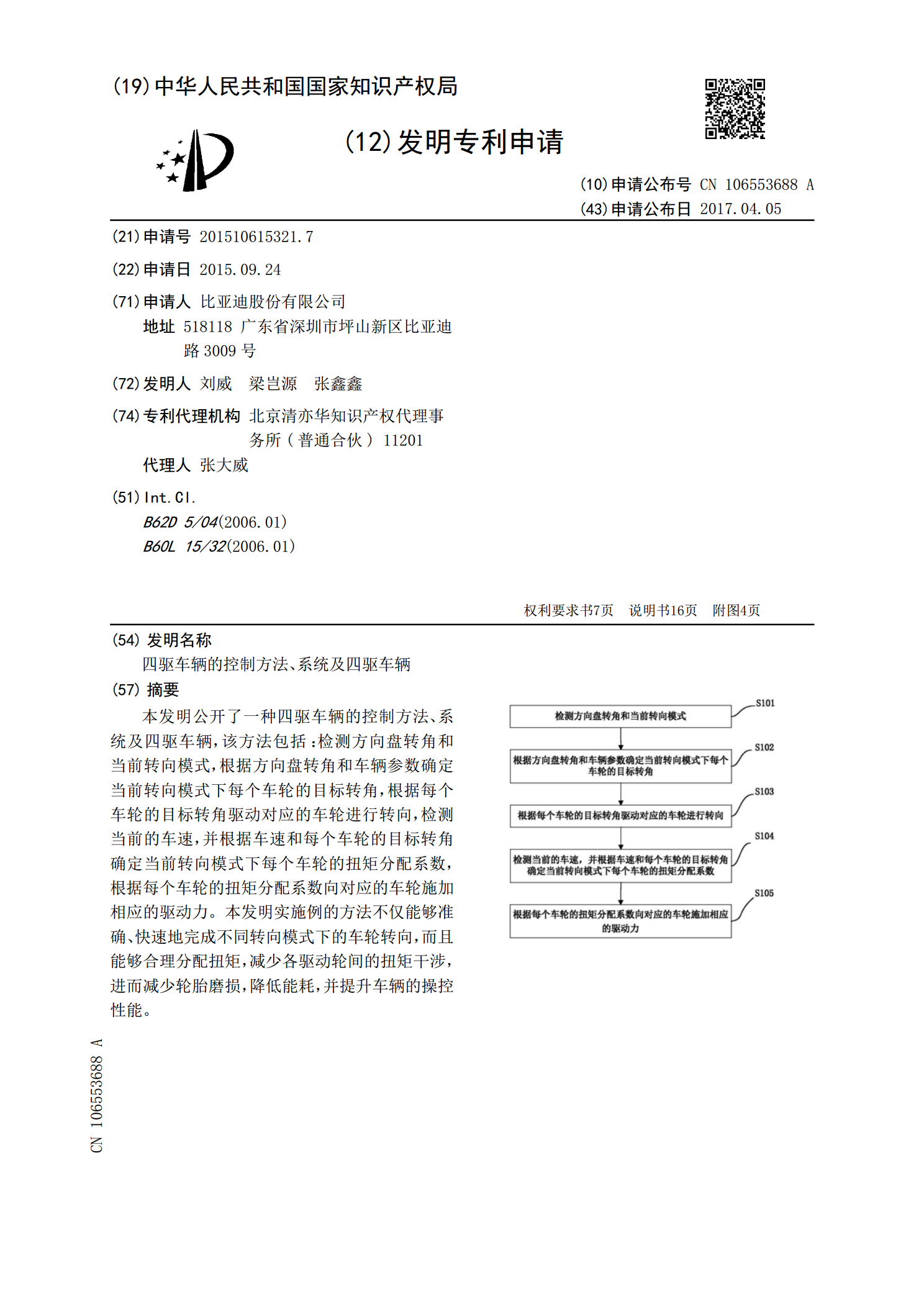
本发明公开了一种四驱车辆的控制方法、系统及四驱车辆,该方法包括:检测方向盘转角和当前转向模式,根据方向盘转角和车辆参数确定当前转向模式下每个车轮的目标转角,根据每个车轮的目标转角驱动对应的车轮进行转向,检测当前的车速,并根据车速和每个车轮的目标转角确定当前转向模式下每个车轮的扭矩分配系数,根据每个车轮的扭矩分配系数向对应的车轮施加相应的驱动力。本发明实施例的方法不仅能够准确、快速地完成不同转向模式下的车轮转向,而且能够合理分配扭矩,减少各驱动轮间的扭矩干涉,进而减少轮胎磨损,降低能耗,并提升车辆的操控性能
极限工况下电动四驱车辆的自主漂移控制方法及系统.pdf
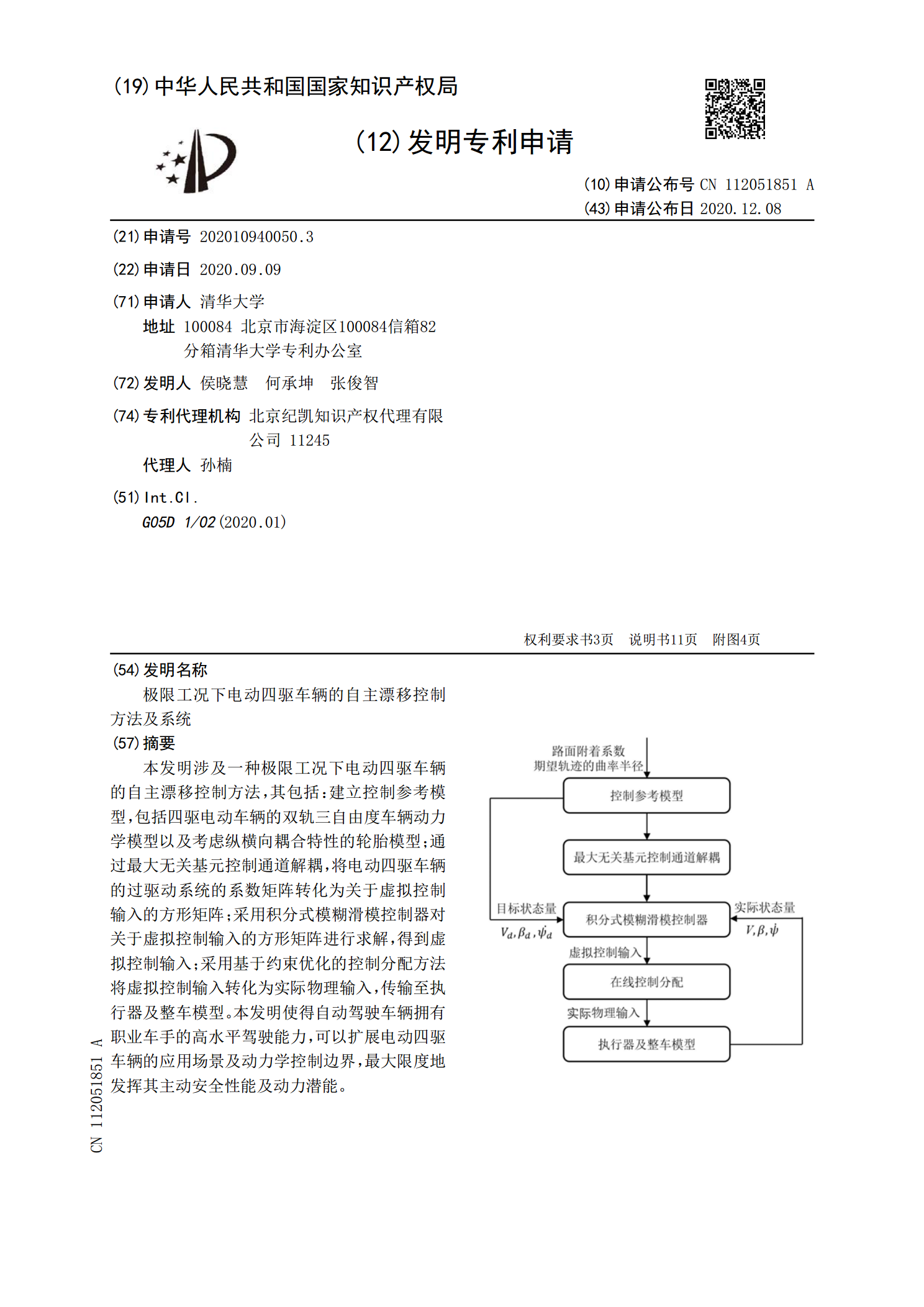
本发明涉及一种极限工况下电动四驱车辆的自主漂移控制方法,其包括:建立控制参考模型,包括四驱电动车辆的双轨三自由度车辆动力学模型以及考虑纵横向耦合特性的轮胎模型;通过最大无关基元控制通道解耦,将电动四驱车辆的过驱动系统的系数矩阵转化为关于虚拟控制输入的方形矩阵;采用积分式模糊滑模控制器对关于虚拟控制输入的方形矩阵进行求解,得到虚拟控制输入;采用基于约束优化的控制分配方法将虚拟控制输入转化为实际物理输入,传输至执行器及整车模型。本发明使得自动驾驶车辆拥有职业车手的高水平驾驶能力,可以扩展电动四驱车辆的应用场景

四驱车.docx
四驱车四驱车_650字最近淘宝网上有一批打折的玩具,汤姆用攒了一个月的零花钱买了一辆四驱车,正当他兴高采烈地准备玩四驱车时,四驱车的后轮“砰!”一下飞了。“咚”的一下砸在了杰瑞家的门上。“乒林乓郎!”杰瑞头上顶着图钉长短的包、穿着睡衣、脱着羊角锤,气呼呼地走了出来。汤姆捂着耳朵、闭着眼睛,还没明白怎么回事,就被杰瑞拿着羊角锤砸了尾巴“唔”被送上了天。掉下来时,不偏不倚坐在了四驱车上“砰!”前轮也飞走了。正好砸在了树上弹了回来“咻”汤姆吓得张大了嘴巴只听见“咕咚”的`一声轮子便被汤姆吃进了肚子,但轮子并没有

四驱车.docx
四驱车四驱车_600字这是一个神奇的小镇,这里有诡计多端的汤姆、精灵古怪的杰瑞;这里有傻大个斯派克、搞怪哥塞拉米;这里还有可爱的泰菲、憨憨的泰克。在这里发生了一个个好玩的故事!今天一大早,汤姆就收到了一个大包裹,打开一看:哇!原来是一个漂亮的四驱车,还配着豪华的跑道,汤姆像中了500万美元是的兴高采烈手舞足蹈。汤姆马上把这个四驱车给杰瑞、斯派克、哥塞拉米、泰菲、泰克看。斯派克、哥塞拉米、泰菲、泰克,都用着羡慕的眼光看着汤姆手上的四驱车,而杰瑞也拿出了一辆四驱车不过没汤姆的好看,但很实用。杰瑞说“你知道四驱
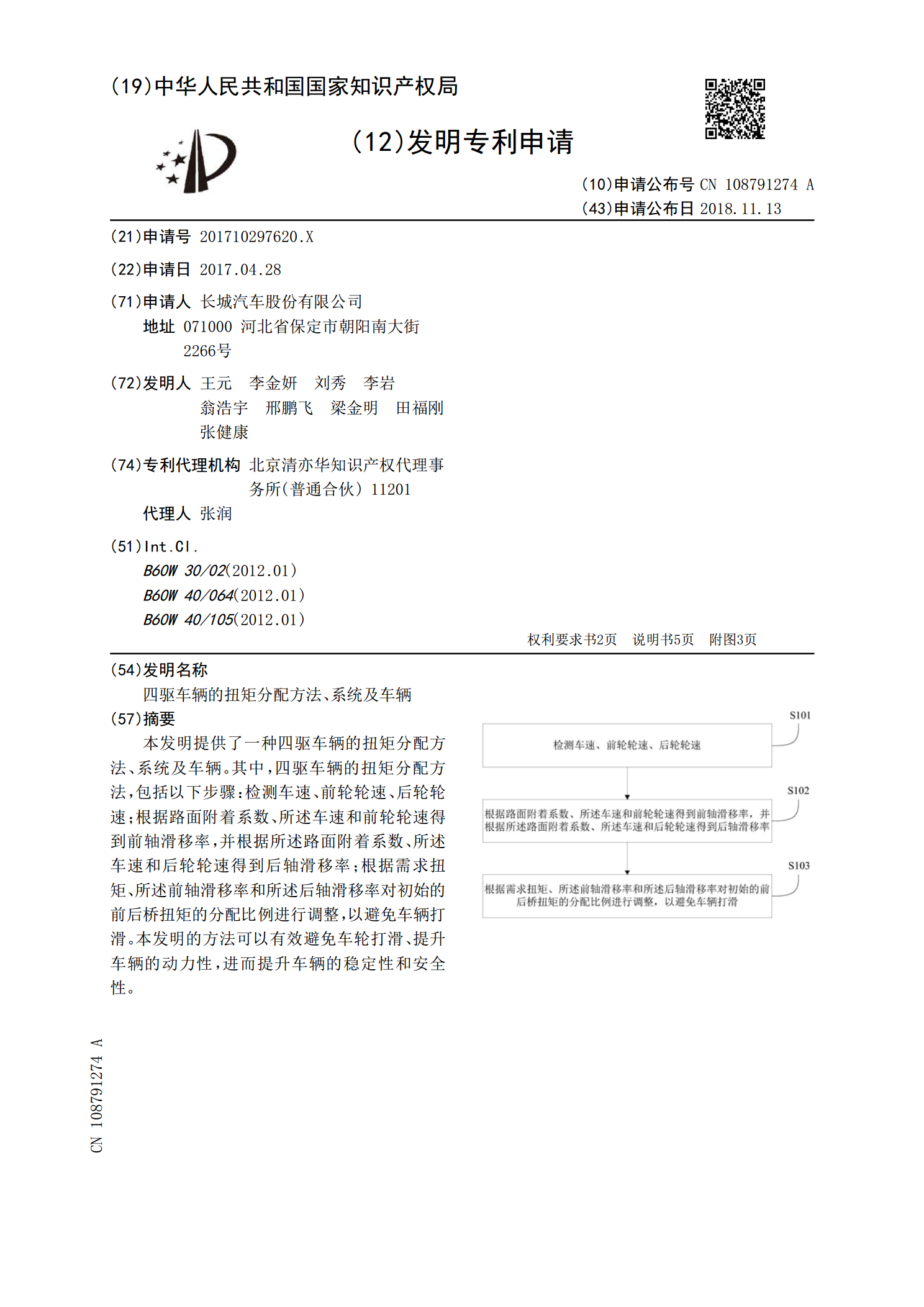
四驱车辆的扭矩分配方法、系统及车辆.pdf
本发明提供了一种四驱车辆的扭矩分配方法、系统及车辆。其中,四驱车辆的扭矩分配方法,包括以下步骤:检测车速、前轮轮速、后轮轮速;根据路面附着系数、所述车速和前轮轮速得到前轴滑移率,并根据所述路面附着系数、所述车速和后轮轮速得到后轴滑移率;根据需求扭矩、所述前轴滑移率和所述后轴滑移率对初始的前后桥扭矩的分配比例进行调整,以避免车辆打滑。本发明的方法可以有效避免车轮打滑、提升车辆的动力性,进而提升车辆的稳定性和安全性。