
一种可避震的通用移动机器人底盘.pdf

秀美****甜v


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可避震的通用移动机器人底盘.pdf
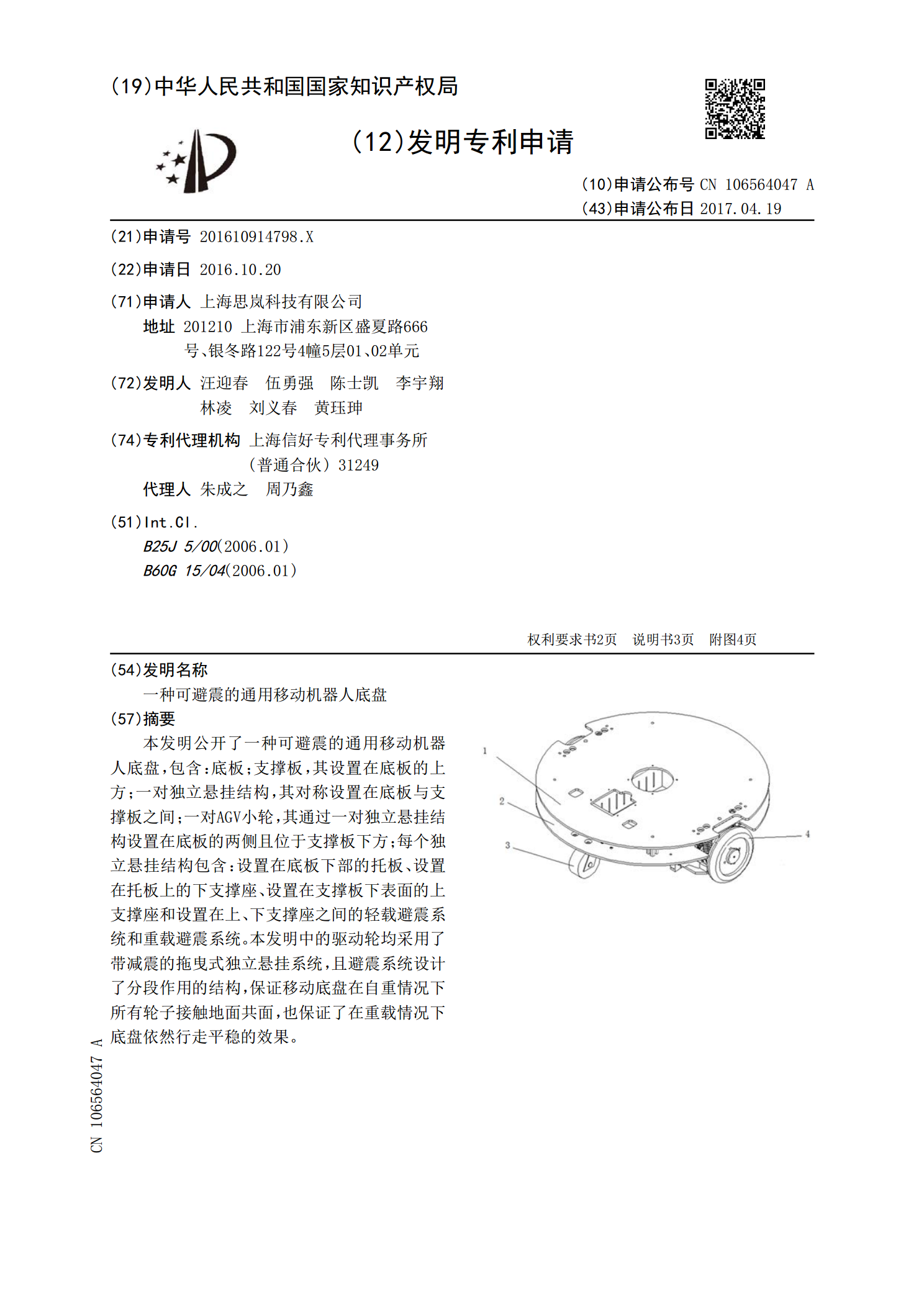
本发明公开了一种可避震的通用移动机器人底盘,包含:底板;支撑板,其设置在底板的上方;一对独立悬挂结构,其对称设置在底板与支撑板之间;一对AGV小轮,其通过一对独立悬挂结构设置在底板的两侧且位于支撑板下方;每个独立悬挂结构包含:设置在底板下部的托板、设置在托板上的下支撑座、设置在支撑板下表面的上支撑座和设置在上、下支撑座之间的轻载避震系统和重载避震系统。本发明中的驱动轮均采用了带减震的拖曳式独立悬挂系统,且避震系统设计了分段作用的结构,保证移动底盘在自重情况下所有轮子接触地面共面,也保证了在重载情况下底盘依

一种六轮AGV避震底盘.pdf
本发明公开了一种六轮AGV避震底盘,涉及AGV机器人设备领域,包括:底板、驱动轮、导向轮、主避震、副避震、顶板和立柱;驱动轮和导向轮固定于底板上;主避震为驱动轮提供减震,且固定在底板上;导向轮包括:第一导向轮和第二导向轮,第一导向轮与副避震固定,副避震与底板固定,顶住顶板并为第一导向轮避震,第二导向轮直接与底板固定,无需避震;立柱支撑并连接底板和顶板;本发明主要用于各种地形复杂的场合的,具有避震效果好,抓地力强等优点。

一种六轮AGV避震底盘.pdf
本发明公开了一种六轮AGV避震底盘,涉及AGV机器人设备领域,包括:前避震系统、底盘本体、驱动轮、主避震系统和导向轮;前避震系统设于底盘本体前端;驱动轮固定于底盘本体中间位置,并且与主避震系统连接达到避震效果;前避震系统固定于底盘本体前部,在主避震系统基础上做进一步避震;导向轮分别固定在前避震系统上和底盘主体后端;本发明主要用于各种地形复杂的场合的,具有避震效果好,抓地力强等优点。
一种可避震的车轮以及车辆.pdf
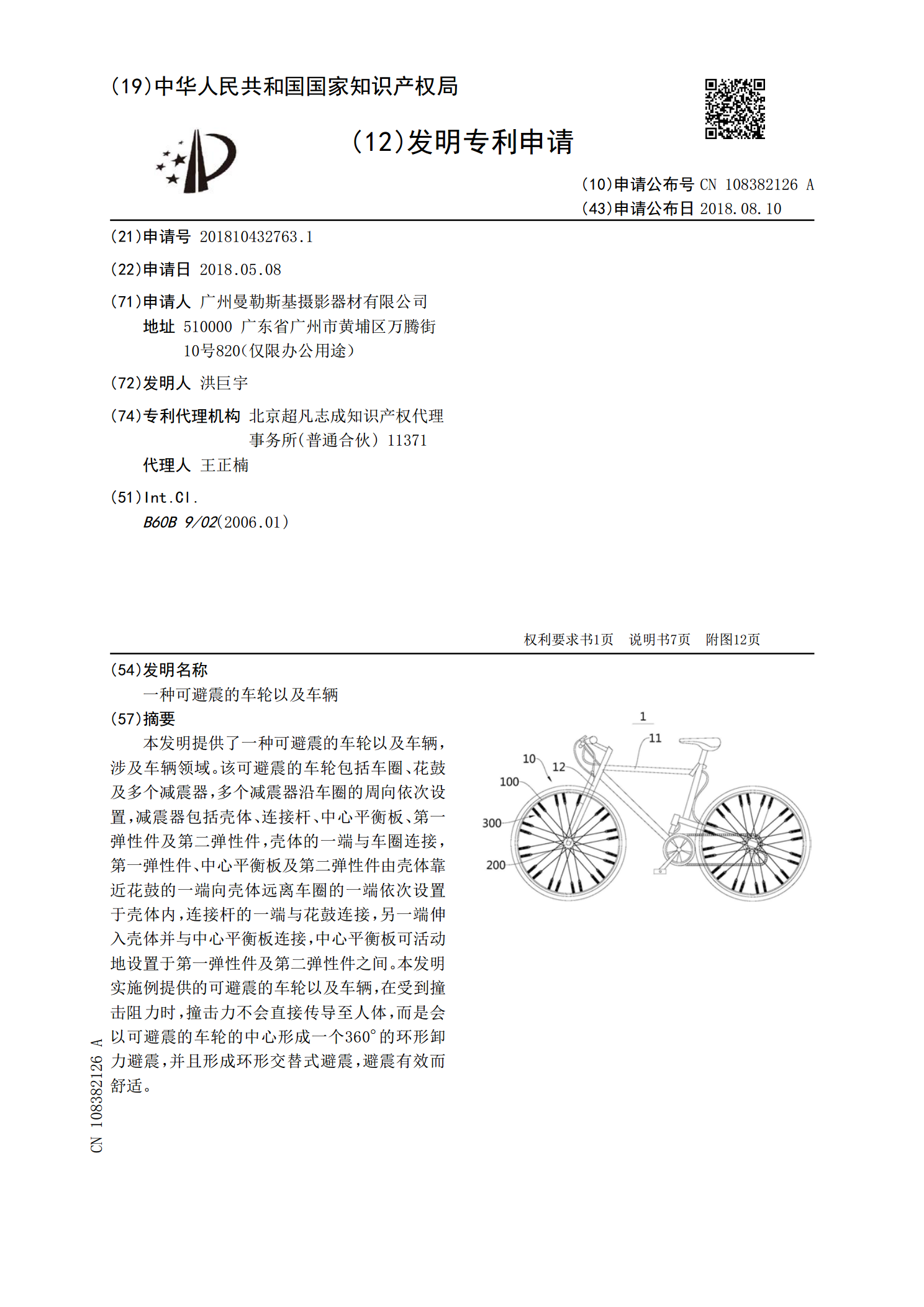
本发明提供了一种可避震的车轮以及车辆,涉及车辆领域。该可避震的车轮包括车圈、花鼓及多个减震器,多个减震器沿车圈的周向依次设置,减震器包括壳体、连接杆、中心平衡板、第一弹性件及第二弹性件,壳体的一端与车圈连接,第一弹性件、中心平衡板及第二弹性件由壳体靠近花鼓的一端向壳体远离车圈的一端依次设置于壳体内,连接杆的一端与花鼓连接,另一端伸入壳体并与中心平衡板连接,中心平衡板可活动地设置于第一弹性件及第二弹性件之间。本发明实施例提供的可避震的车轮以及车辆,在受到撞击阻力时,撞击力不会直接传导至人体,而是会以可避震的

一种可避障车辆底盘检查机器人.pdf
本发明公开了一种可避障车辆底盘检查机器人,包括有一车体,所述车体上设有车轮,所述车体内设有用于驱动车轮转动的伺服电机;车体顶面设有第一凹槽,第一凹槽内设有监控摄像头;通过这种结构设计的车辆,能够跑到车底进行检查和查看,方便底盘检查,而且,增添了重新设计的天线结构,能够有效增加通信性能,提高实用性。