
一种料盒运输车.pdf

Jo****34

1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种料盒运输车.pdf
本发明公开了一种料盒运输车,包括运输车本体以及安装在运输车上的氮气柜,其中,所述运输车本体上还安装有行驶控制模块、转向舵机模块、超声波测距模块、摄像头、无线传输模块、控制器,所述控制器分别与行驶控制模块、转向舵机模块、超声波测距模块、摄像头、无线传输模块连接,转向舵机模块通过转向拉杆与运输车的前轮连接。
一种料盒.pdf
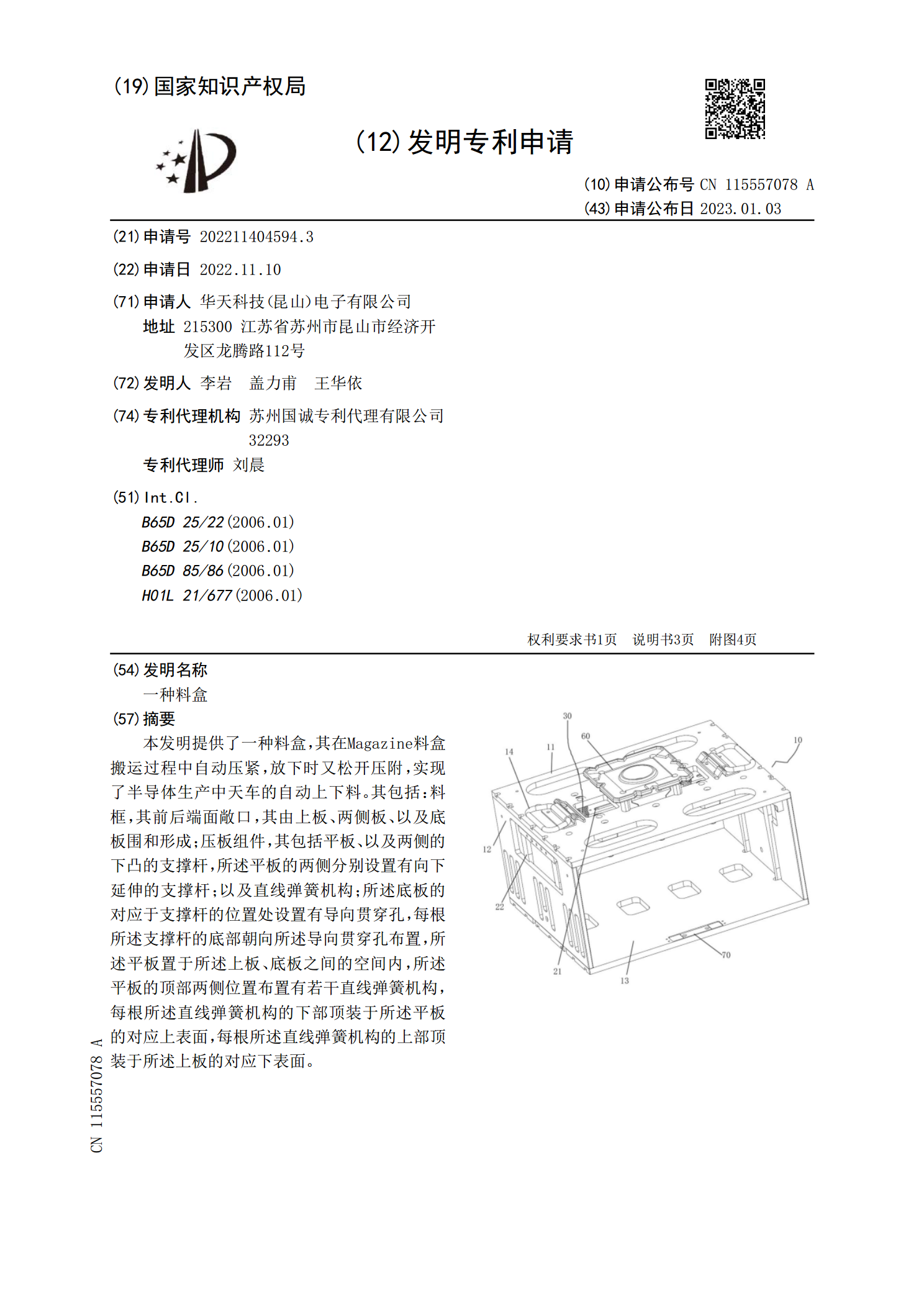
本发明提供了一种料盒,其在Magazine料盒搬运过程中自动压紧,放下时又松开压附,实现了半导体生产中天车的自动上下料。其包括:料框,其前后端面敞口,其由上板、两侧板、以及底板围和形成;压板组件,其包括平板、以及两侧的下凸的支撑杆,所述平板的两侧分别设置有向下延伸的支撑杆;以及直线弹簧机构;所述底板的对应于支撑杆的位置处设置有导向贯穿孔,每根所述支撑杆的底部朝向所述导向贯穿孔布置,所述平板置于所述上板、底板之间的空间内,所述平板的顶部两侧位置布置有若干直线弹簧机构,每根所述直线弹簧机构的下部顶装于所述平板
一种基于红外避障传感器的智能料盒运输车.pdf
本发明公开了一种基于红外避障传感器的智能料盒运输车,包括运输车本体以及安装在运输车上的氮气柜,其中,所述运输车本体上还安装有行驶控制模块、舵机、蜂鸣器、摄像头、无线传输模块、控制器,所述控制器分别与行驶控制模块、舵机、蜂鸣器、摄像头、无线传输模块连接,所述舵机上连接有云台,所述云台上连接有红外避障传感器,所述红外避障传感器与控制器连接。
一种砖料运输车.pdf
本发明涉及运输领域,特别涉及一种砖料运输车,包括运输车本体,该运输车本体的后侧设有车斗,所述车斗上架设有支撑架,该支撑架底部位于车斗的上方设有起吊装置,起吊装置与支撑架滑动配合,支撑架的一侧设有驱动机构,该驱动机构与起吊装置传动连接以用于驱动该起吊装置移动;所述砖料运输车还包括用于码放承载砖料的承载板,所述起吊装置包括四个垂直悬挂的吊钩及两个同步转动的支撑轴,在两个支撑轴的两端分别设有一个卷筒,每个吊钩分别通过吊绳卷绕在一个卷筒上,所述支撑板上设有四个呈矩形分布的吊耳。本发明实现了砖料的成堆的装卸,使运输

一种四料盒站.pdf
本发明的一种四料盒站,包括四料盒装置、安装板、旋转机构、主动轮、伺服电机和同步带等,所述旋转机构包括旋转导料治具、从动轮、入料板和感应器。本发明通过科学合理地将旋转机构、四料盒装置和伺服电机等组合使用,并科学合理地设计了旋转导料治具的结构,使旋转机构实现能根据PLC控制系统判断出产品的种类来控制伺服电机每次旋转的角度和旋转的次数,从而实现能将产品旋转至与之种类相应的料盒内,进而实现能对多种不同种类或多种不同规格的产品进行分选,其具有分选效果好、分选精度高和结构简单的优点,并有效地解决了目前的分料设备只能进