
一种无人驾驶汽车用转向控制装置.pdf

书生****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人驾驶汽车用转向控制装置.pdf
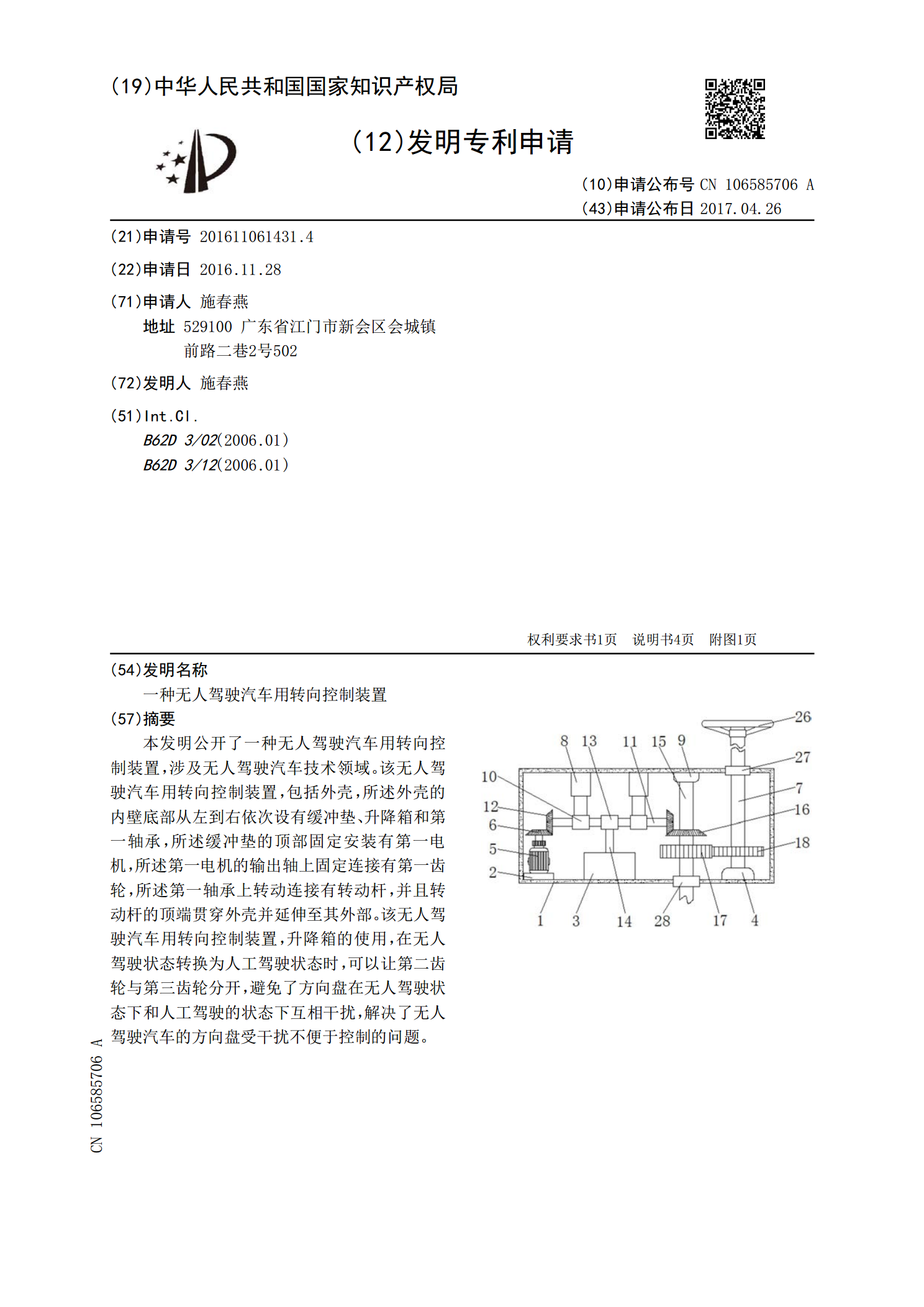
本发明公开了一种无人驾驶汽车用转向控制装置,涉及无人驾驶汽车技术领域。该无人驾驶汽车用转向控制装置,包括外壳,所述外壳的内壁底部从左到右依次设有缓冲垫、升降箱和第一轴承,所述缓冲垫的顶部固定安装有第一电机,所述第一电机的输出轴上固定连接有第一齿轮,所述第一轴承上转动连接有转动杆,并且转动杆的顶端贯穿外壳并延伸至其外部。该无人驾驶汽车用转向控制装置,升降箱的使用,在无人驾驶状态转换为人工驾驶状态时,可以让第二齿轮与第三齿轮分开,避免了方向盘在无人驾驶状态下和人工驾驶的状态下互相干扰,解决了无人驾驶汽车的方向

一种无人驾驶汽车电动线控转向装置及转向控制方法.pdf
本发明公开了一种无人驾驶汽车电动线控转向装置,包括:转向电机;直齿轮减速箱,其通过主动齿轮与所述转向电机的输出轴连接;锥齿轮减速器,其通过锥形主动齿轮与所述直齿轮减速箱的输出轴连接;转向传动轴,其一端穿过所述锥齿轮减速器,并与所述锥齿轮减速器的从动齿轮连接。本发明提供的无人驾驶汽车电动线控转向装置,采用电动机提供动力,占用空间小,通用性强,扭矩大,可以实现转向的精确控制。本发明提供的基于无人驾驶汽车电动线控转向装置的无人驾驶汽车转向控制方法,通过模糊控制的方法在车辆行驶过程中对转向传动轴的转动角度进行控制
一种用于无人驾驶汽车的转向装置.pdf
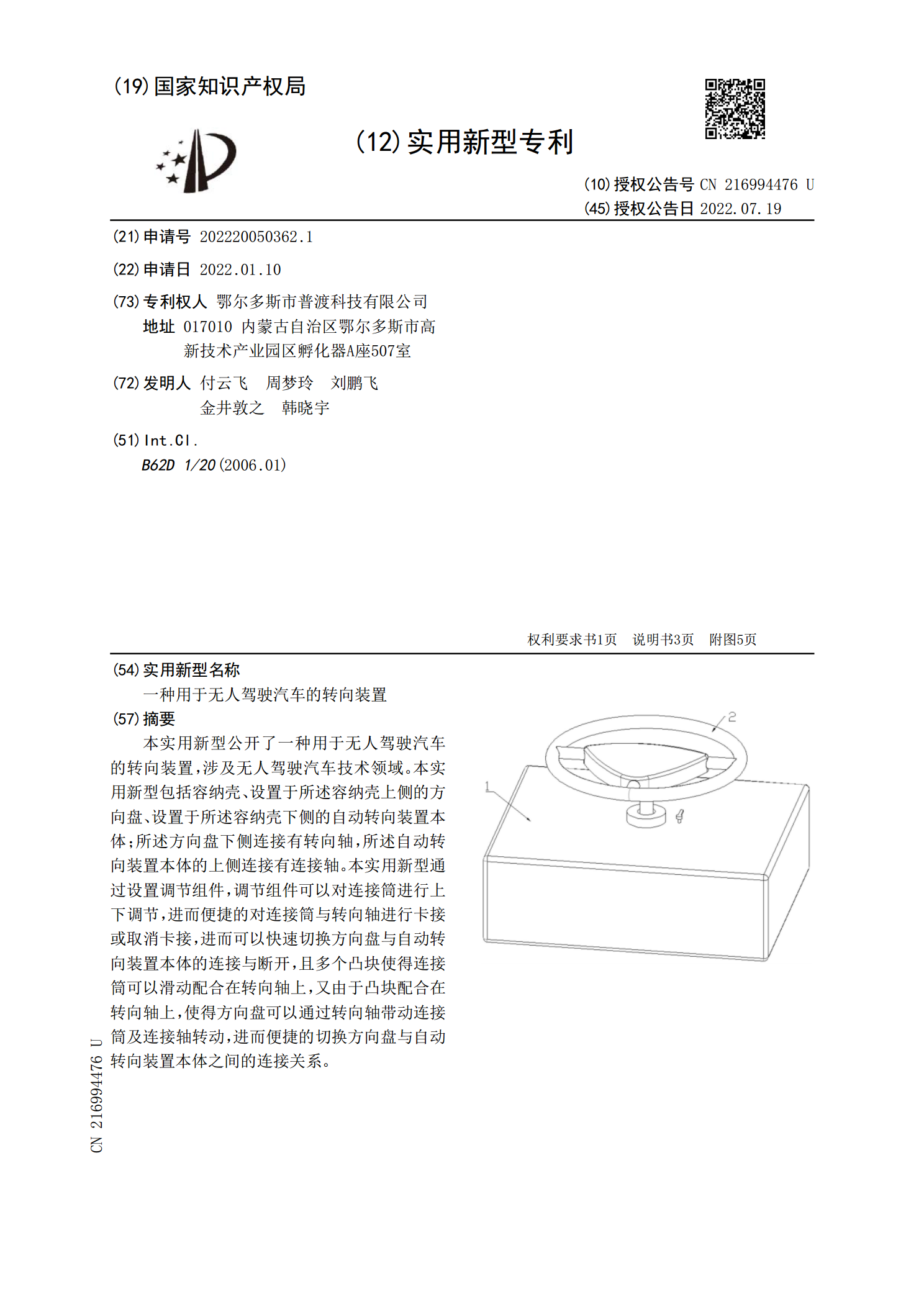
本实用新型公开了一种用于无人驾驶汽车的转向装置,涉及无人驾驶汽车技术领域。本实用新型包括容纳壳、设置于所述容纳壳上侧的方向盘、设置于所述容纳壳下侧的自动转向装置本体;所述方向盘下侧连接有转向轴,所述自动转向装置本体的上侧连接有连接轴。本实用新型通过设置调节组件,调节组件可以对连接筒进行上下调节,进而便捷的对连接筒与转向轴进行卡接或取消卡接,进而可以快速切换方向盘与自动转向装置本体的连接与断开,且多个凸块使得连接筒可以滑动配合在转向轴上,又由于凸块配合在转向轴上,使得方向盘可以通过转向轴带动连接筒及连接轴转
一种避免磨损的无人驾驶汽车转向装置.pdf
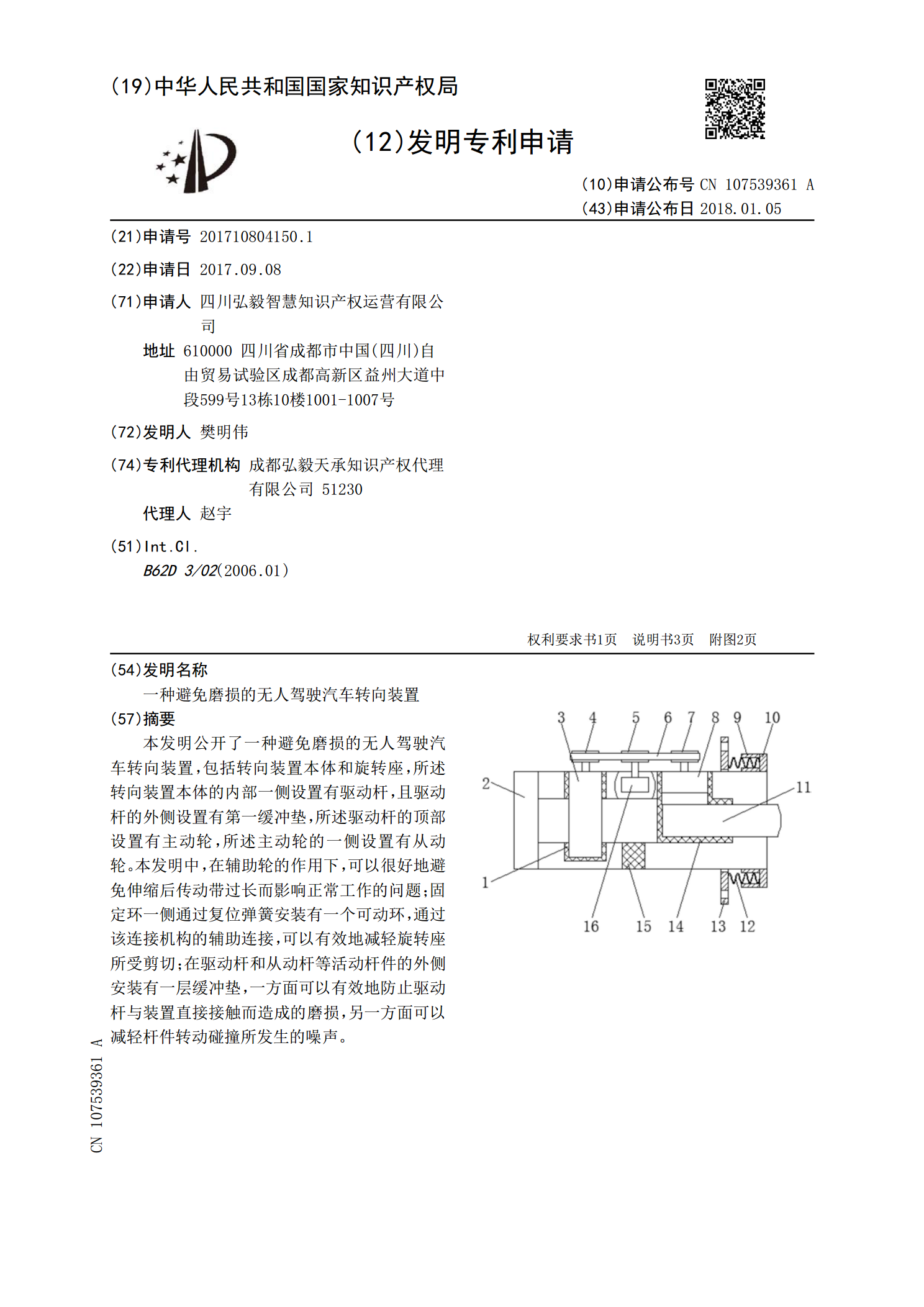
本发明公开了一种避免磨损的无人驾驶汽车转向装置,包括转向装置本体和旋转座,所述转向装置本体的内部一侧设置有驱动杆,且驱动杆的外侧设置有第一缓冲垫,所述驱动杆的顶部设置有主动轮,所述主动轮的一侧设置有从动轮。本发明中,在辅助轮的作用下,可以很好地避免伸缩后传动带过长而影响正常工作的问题;固定环一侧通过复位弹簧安装有一个可动环,通过该连接机构的辅助连接,可以有效地减轻旋转座所受剪切;在驱动杆和从动杆等活动杆件的外侧安装有一层缓冲垫,一方面可以有效地防止驱动杆与装置直接接触而造成的磨损,另一方面可以减轻杆件转动
一种无人驾驶车辆自动转向装置的转向控制方法.pdf
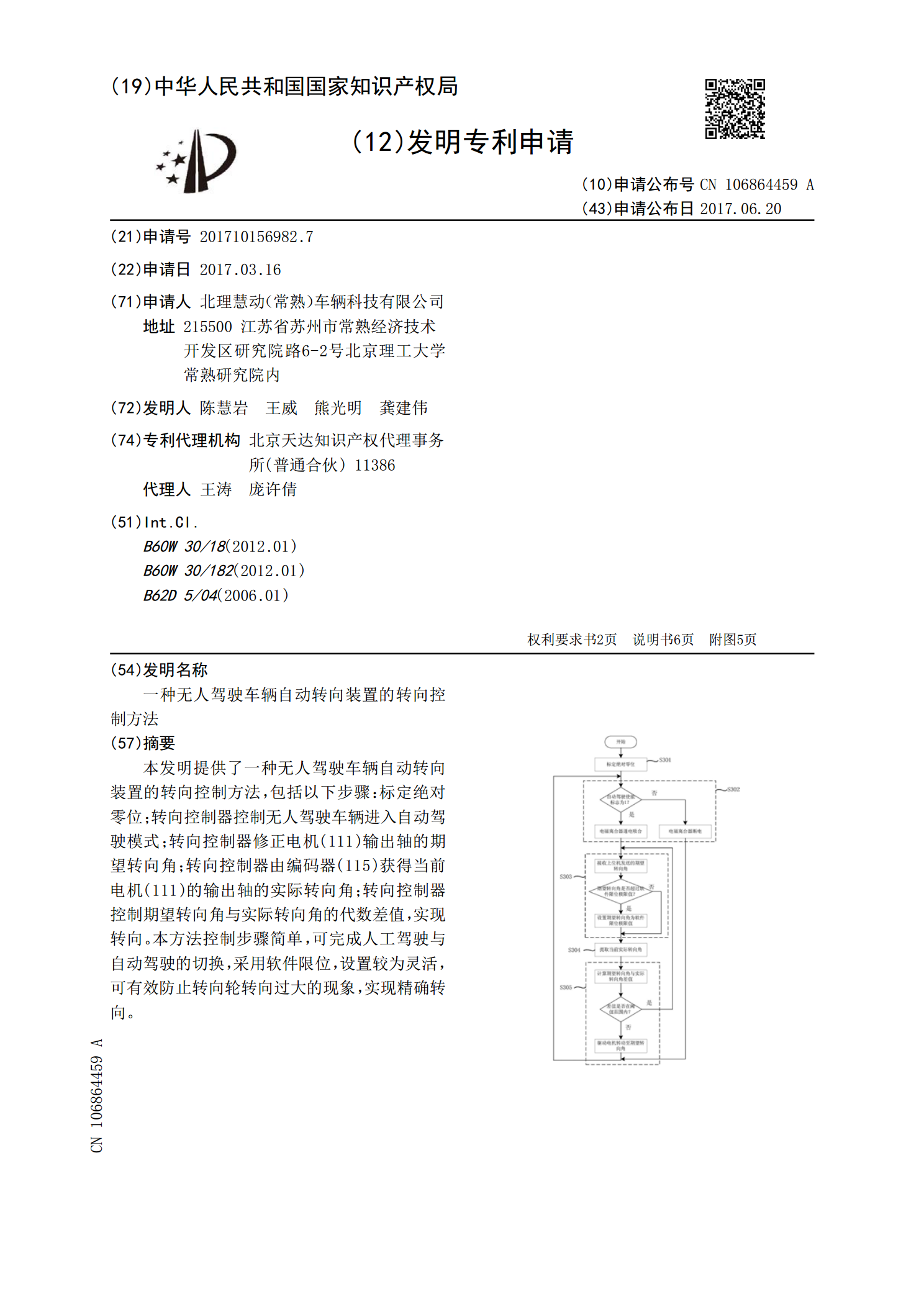
本发明提供了一种无人驾驶车辆自动转向装置的转向控制方法,包括以下步骤:标定绝对零位;转向控制器控制无人驾驶车辆进入自动驾驶模式;转向控制器修正电机(111)输出轴的期望转向角;转向控制器由编码器(115)获得当前电机(111)的输出轴的实际转向角;转向控制器控制期望转向角与实际转向角的代数差值,实现转向。本方法控制步骤简单,可完成人工驾驶与自动驾驶的切换,采用软件限位,设置较为灵活,可有效防止转向轮转向过大的现象,实现精确转向。