
基于结构光的轴承油沟自动测量系统及方法.pdf

小代****回来

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于结构光的轴承油沟自动测量系统及方法.pdf
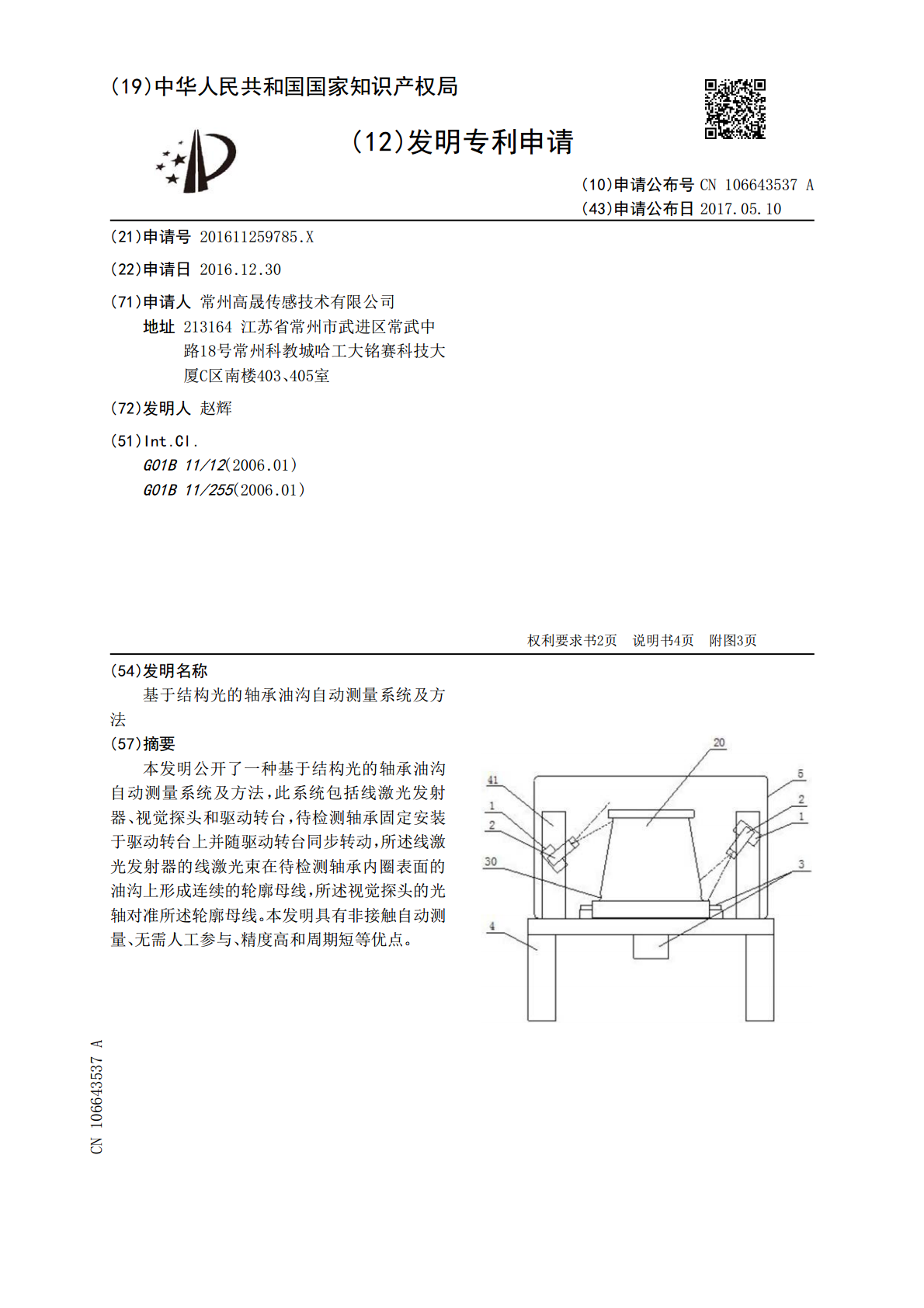
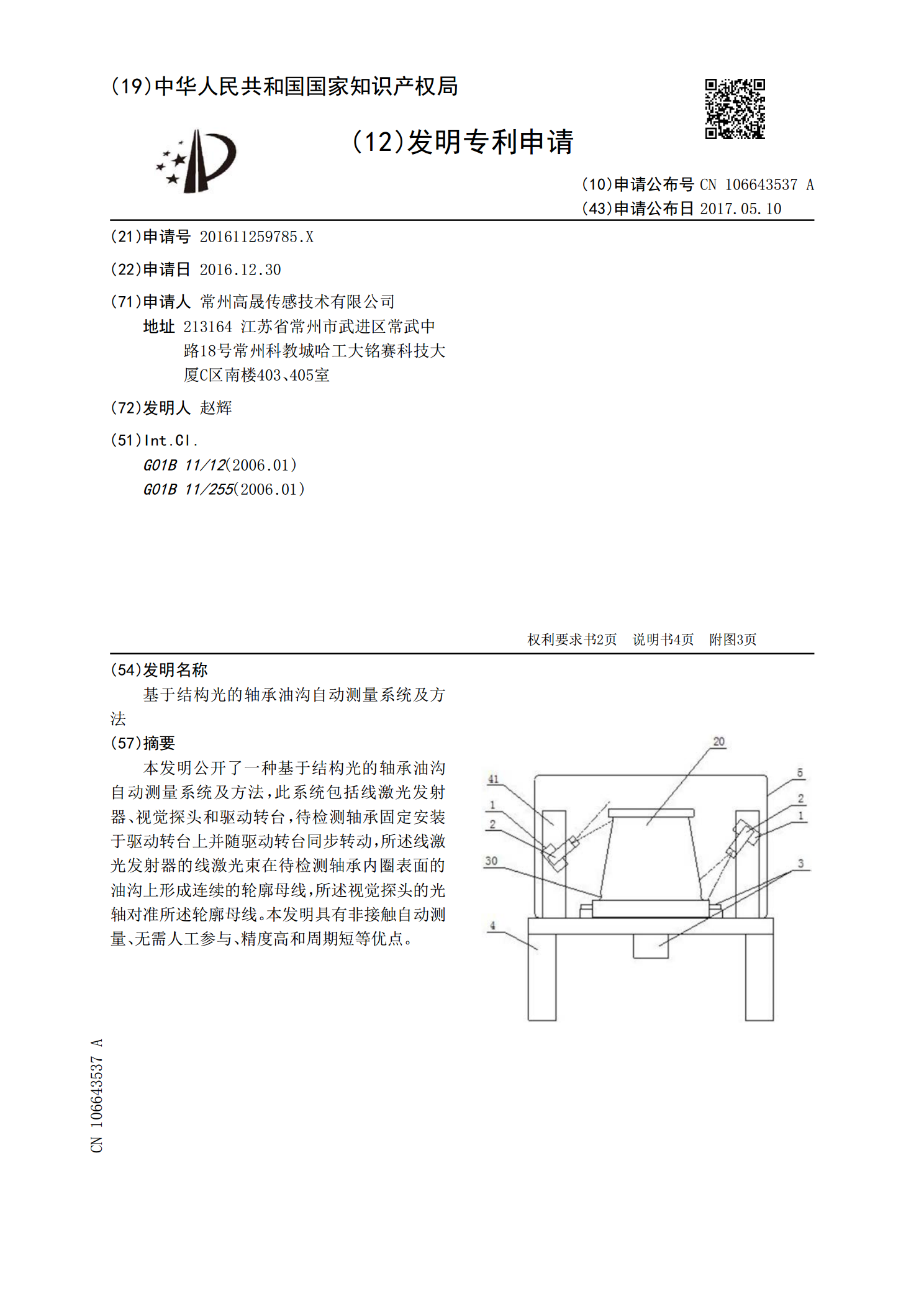
本发明公开了一种基于结构光的轴承油沟自动测量系统及方法,此系统包括线激光发射器、视觉探头和驱动转台,待检测轴承固定安装于驱动转台上并随驱动转台同步转动,所述线激光发射器的线激光束在待检测轴承内圈表面的油沟上形成连续的轮廓母线,所述视觉探头的光轴对准所述轮廓母线。本发明具有非接触自动测量、无需人工参与、精度高和周期短等优点。

基于无衍射光的轴承孔位姿测量系统与光路分析.docx
基于无衍射光的轴承孔位姿测量系统与光路分析基于无衍射光的轴承孔位姿测量系统与光路分析引言:轴承是现代机械制造中常用的重要元件之一,其质量和性能直接影响机械设备的运行和寿命。而轴承的安装位置和角度,即孔位姿的精确测量对于轴承的性能和使用效果起到至关重要的作用。而传统的测量方法通常使用衍射光进行轴承的孔位姿测量,但其存在着一些问题,如光线干扰、衍射效应影响测量精度等。为解决这些问题,本文提出了一种基于无衍射光的轴承孔位姿测量系统,并对其光路进行了详细的分析和研究。一、系统的工作原理本系统基于无衍射光的测量方法

基于结构光的车轮多参数在线测量系统及其测量方法.pdf
一种基于结构光的车轮多参数在线测量系统,其包括车轮传感器、第一车轮在线测量装置及第二车轮在线测量装置,第一车轮在线测量装置、第二车轮在线测量装置均包括踏面结构光单元、剖面结构光单元及二维图像传感器;踏面结构光单元与剖面结构光单元在车轮上投影出剖面轮廓曲线与踏面轮廓曲线,二维图像传感器摄取图像,并将图像三维重建获取踏面与剖面轮廓信息,根据获取的轮廓信息获得车轮直径、轮缘高及轮缘厚;本发明的可靠性及测量精度高,且减小了外界环境光的影响;还可根据同一个圆上两段剖面结构光轮廓拟合圆求出车轮直径,从而,无需对车轮进
一种基于动态结构光测量的过鱼道过鱼量自动计数系统及计数方法.pdf
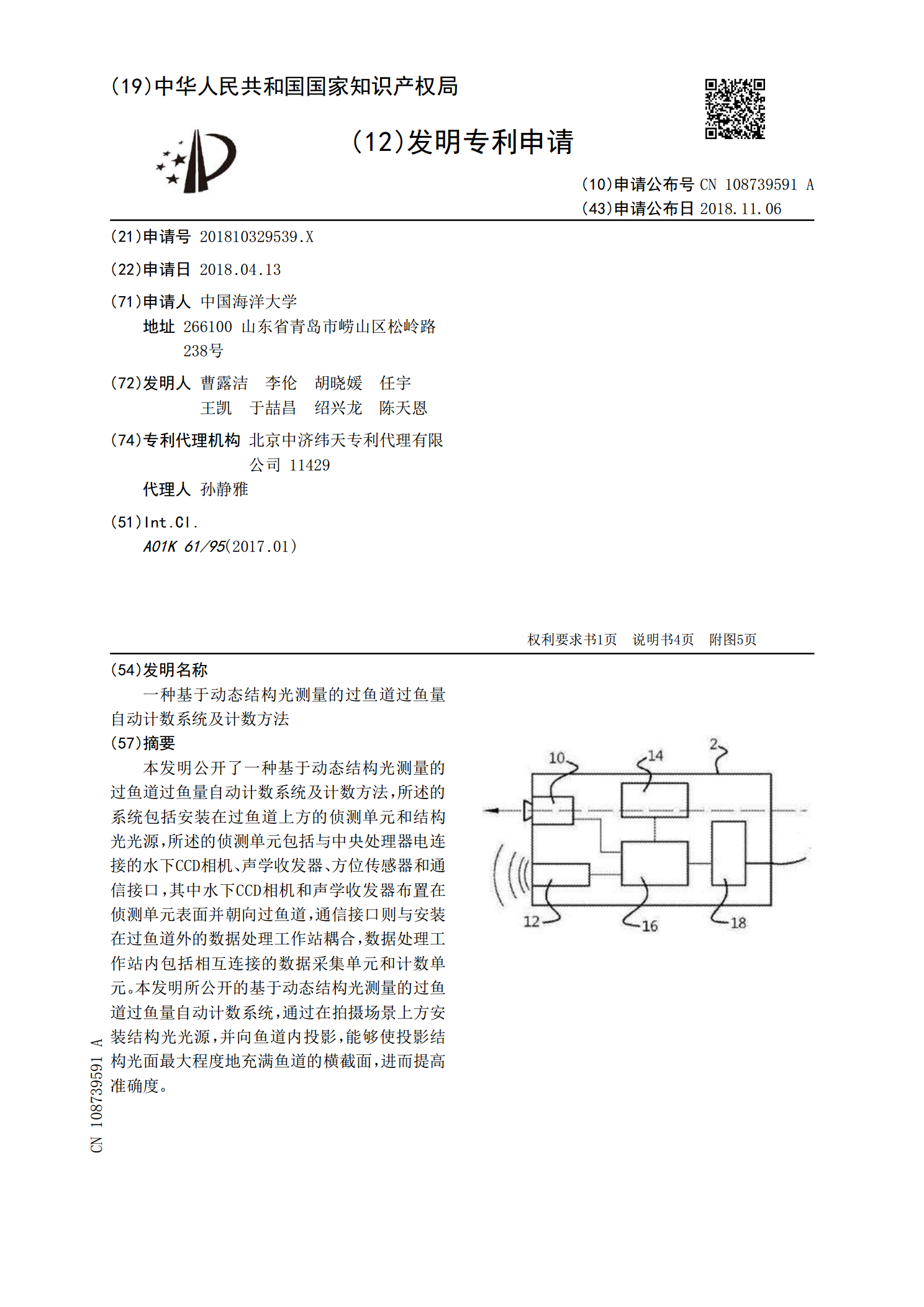
本发明公开了一种基于动态结构光测量的过鱼道过鱼量自动计数系统及计数方法,所述的系统包括安装在过鱼道上方的侦测单元和结构光光源,所述的侦测单元包括与中央处理器电连接的水下CCD相机、声学收发器、方位传感器和通信接口,其中水下CCD相机和声学收发器布置在侦测单元表面并朝向过鱼道,通信接口则与安装在过鱼道外的数据处理工作站耦合,数据处理工作站内包括相互连接的数据采集单元和计数单元。本发明所公开的基于动态结构光测量的过鱼道过鱼量自动计数系统,通过在拍摄场景上方安装结构光光源,并向鱼道内投影,能够使投影结构光面最大

基于线结构光测量系统标定的研究.pptx
汇报人:/目录0102系统组成和工作原理系统应用领域系统标定的重要性和必要性03标定方法分类标定步骤和流程标定实验和数据采集标定结果分析和评估04实验设备和工具实验步骤和操作流程实验数据分析和处理实验结果和误差分析05标定参数优化标定算法改进标定精度提高措施标定软件和硬件升级06案例一:工业测量中的应用案例二:表面质量检测中的应用案例三:三维重建和虚拟现实中的应用案例四:其他领域中的应用07新技术和新方法的发展趋势标定精度和可靠性的提高方向系统集成化和智能化的展望未来研究和应用领域拓展汇报人: