
基于结构光的车轮多参数在线测量系统及其测量方法.pdf

雨巷****可歆

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于结构光的车轮多参数在线测量系统及其测量方法.pdf
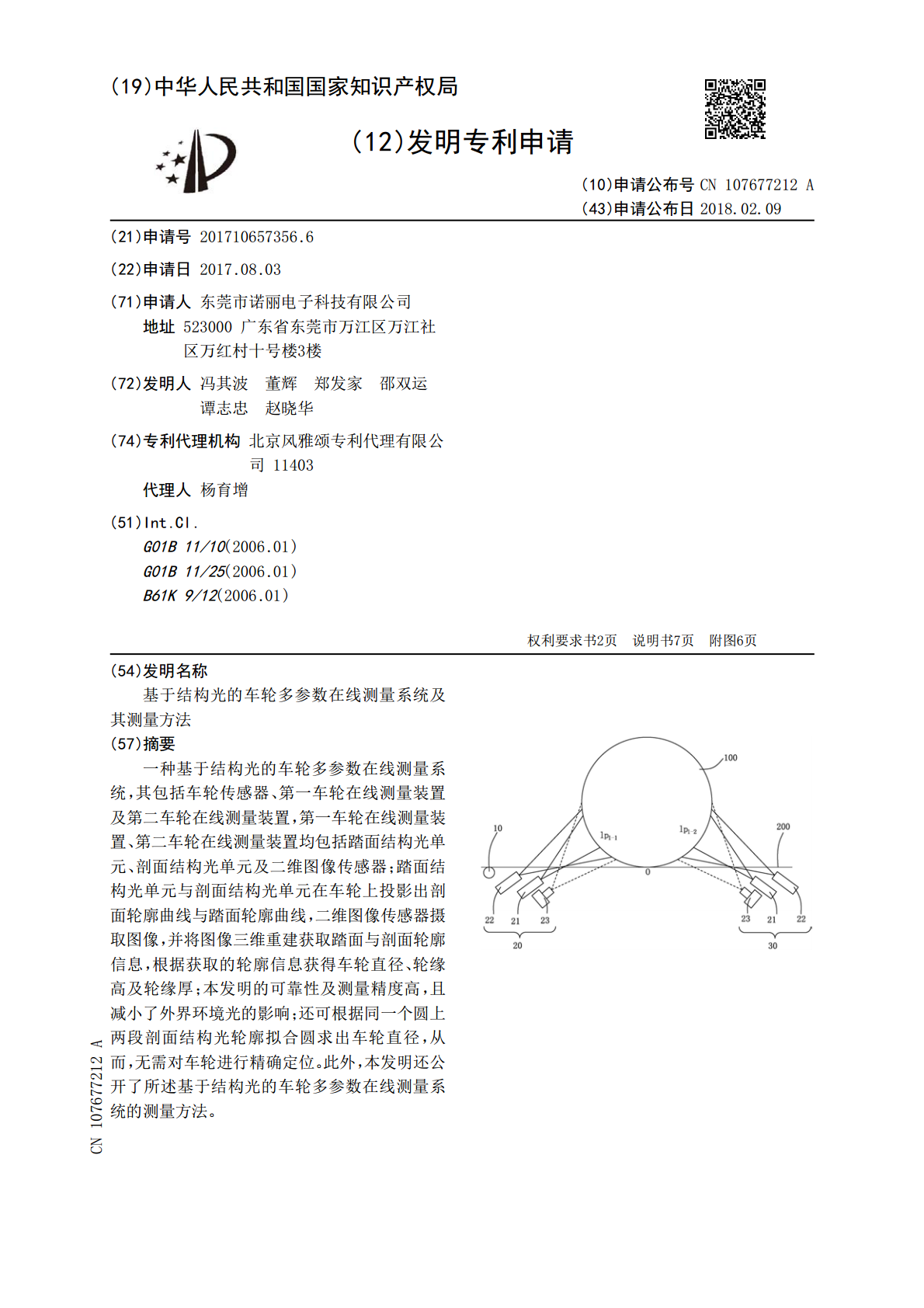
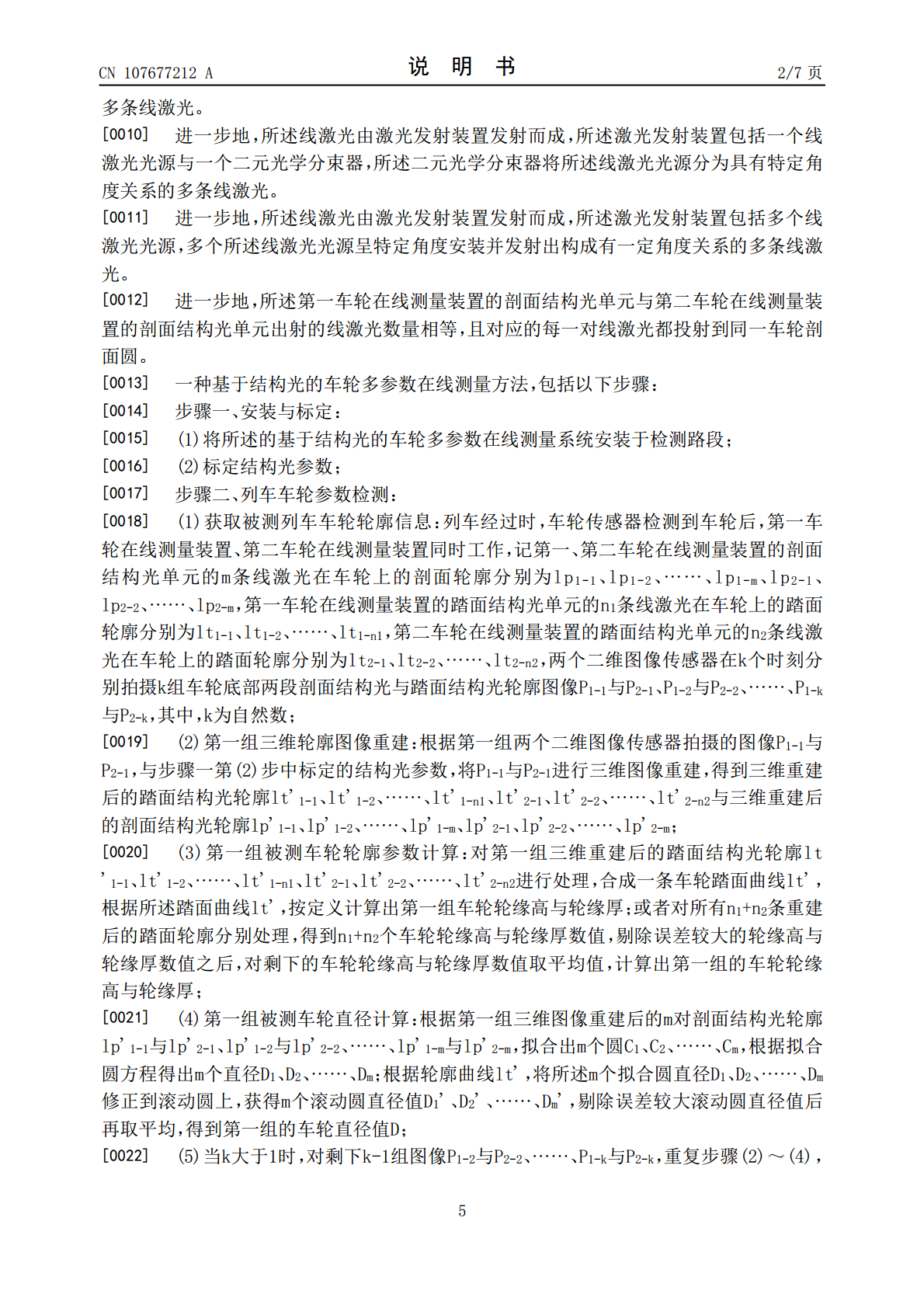
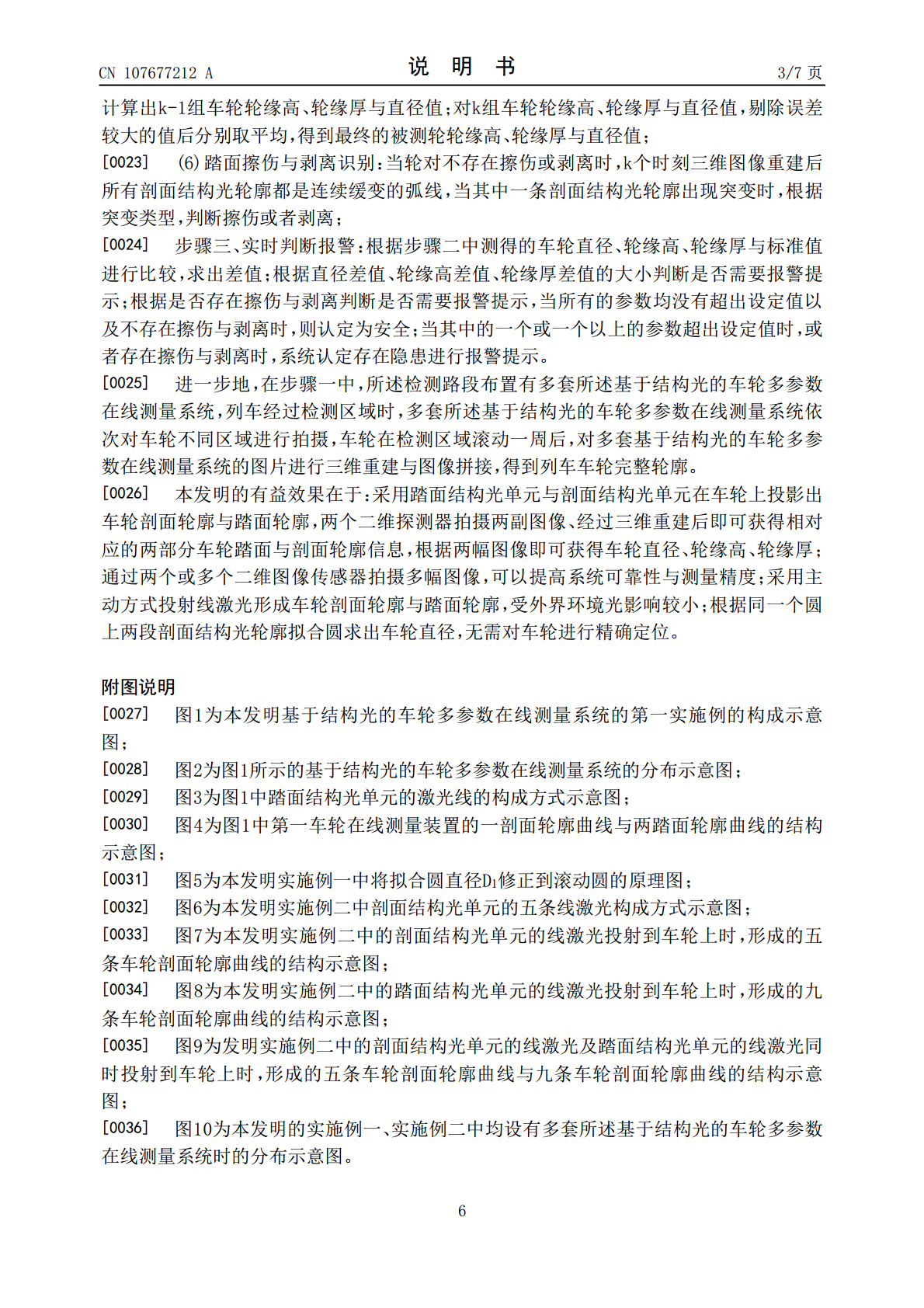
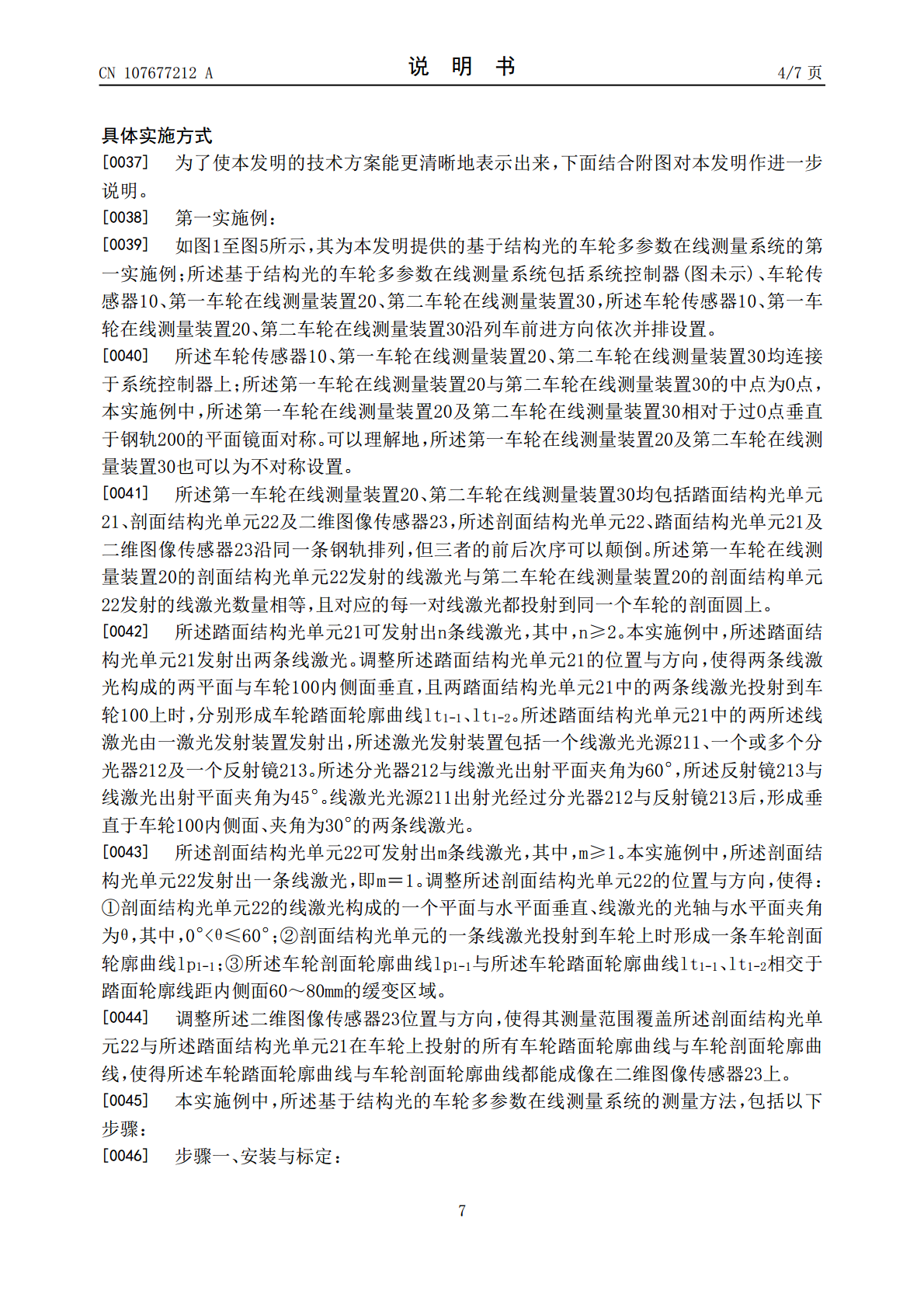
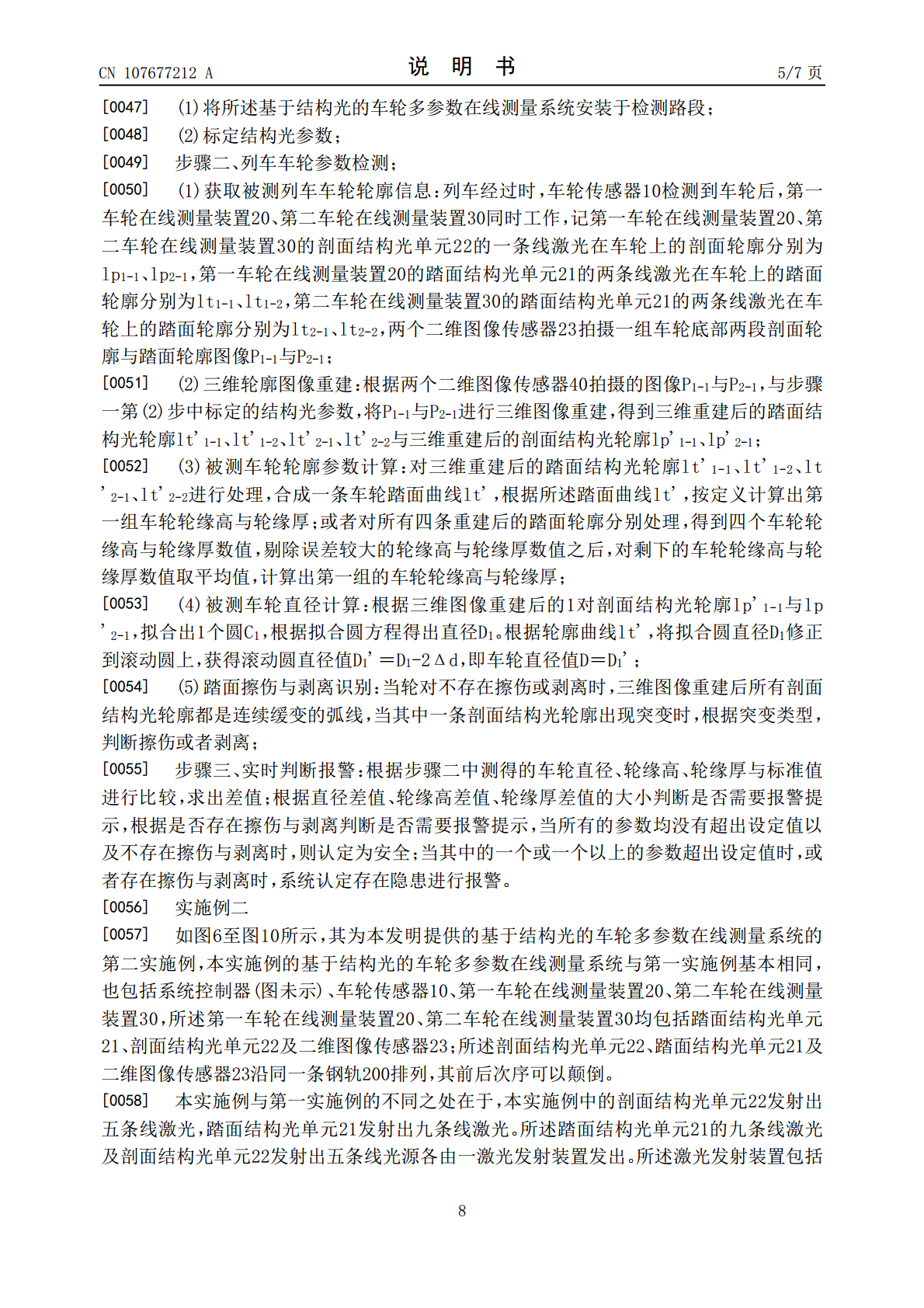
一种基于结构光的车轮多参数在线测量系统,其包括车轮传感器、第一车轮在线测量装置及第二车轮在线测量装置,第一车轮在线测量装置、第二车轮在线测量装置均包括踏面结构光单元、剖面结构光单元及二维图像传感器;踏面结构光单元与剖面结构光单元在车轮上投影出剖面轮廓曲线与踏面轮廓曲线,二维图像传感器摄取图像,并将图像三维重建获取踏面与剖面轮廓信息,根据获取的轮廓信息获得车轮直径、轮缘高及轮缘厚;本发明的可靠性及测量精度高,且减小了外界环境光的影响;还可根据同一个圆上两段剖面结构光轮廓拟合圆求出车轮直径,从而,无需对车轮进
土壤多参数测量系统及其测量方法.pdf
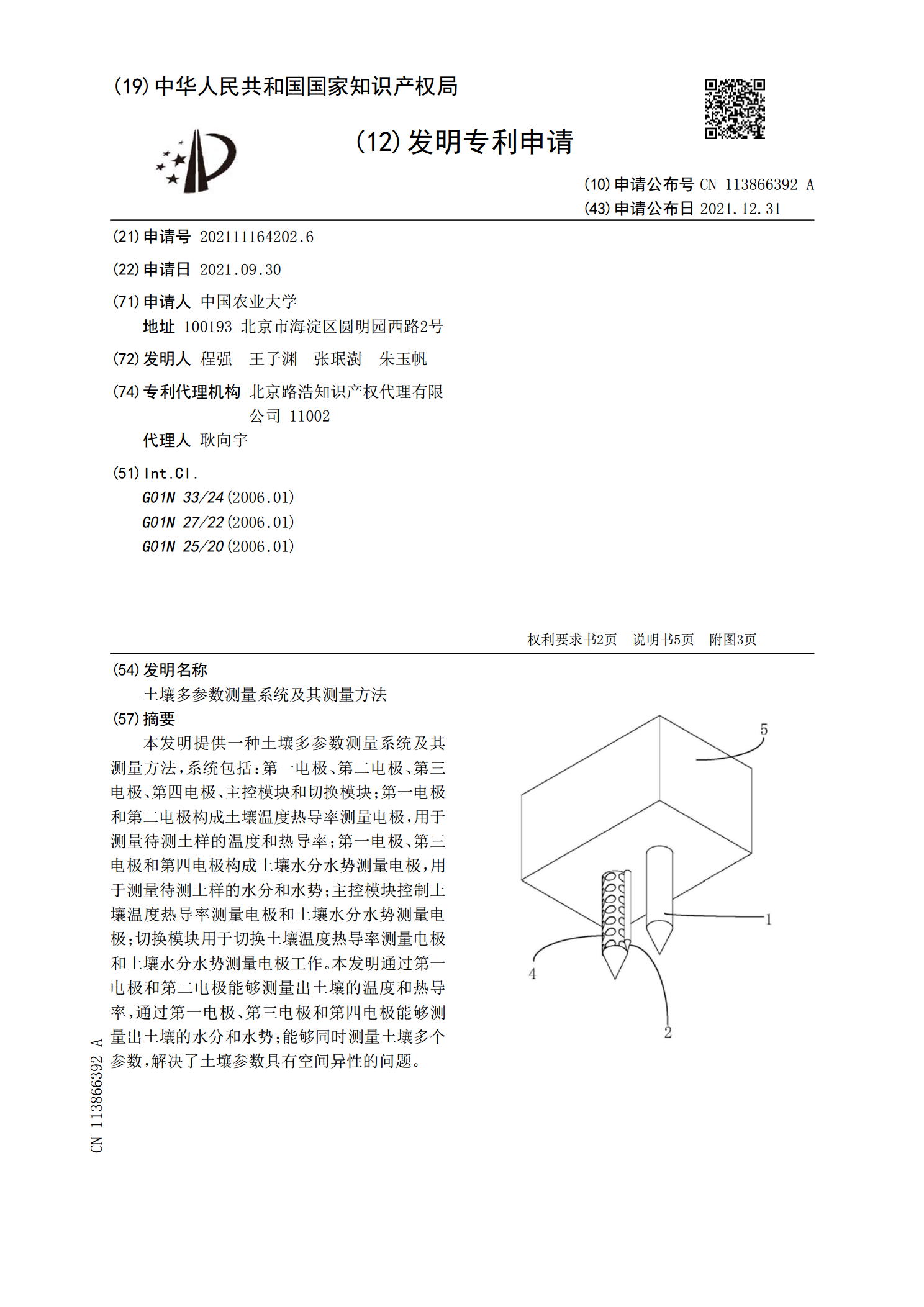
本发明提供一种土壤多参数测量系统及其测量方法,系统包括:第一电极、第二电极、第三电极、第四电极、主控模块和切换模块;第一电极和第二电极构成土壤温度热导率测量电极,用于测量待测土样的温度和热导率;第一电极、第三电极和第四电极构成土壤水分水势测量电极,用于测量待测土样的水分和水势;主控模块控制土壤温度热导率测量电极和土壤水分水势测量电极;切换模块用于切换土壤温度热导率测量电极和土壤水分水势测量电极工作。本发明通过第一电极和第二电极能够测量出土壤的温度和热导率,通过第一电极、第三电极和第四电极能够测量出土壤的水

基于高精度同轴定位的多参数内径测量系统与测量方法.pdf
本发明涉及一种基于高精度同轴定位的多参数内径测量系统与测量方法,包括行走定位机构、激光位移传感器、激光测距仪、电机驱动装置、微控制模块、无线传输网络、上位机软件、便携式电源、光学倾斜测角装置以及多点测温补偿装置。系统由靠柔性件联接的双锥体联动机构实现两面六点定轴。激光位移传感器用于测量相对位移量。激光测距仪用于测量轴向前进距离。四个伺服电机分别驱动定位机构、双轮行走、测量臂旋转。微控制模块实现数据采集、状态检测、电机控制等。无线传输网络实现下位机和上位机所有信息传递。上位机软件用于数据处理和测量控制。便携

在线车轮直径测量方法.pdf
一种在线车轮直径测量方法,用于对导轨上经过的车轮的直径进行测量,包括:步骤(1):提供激光发射组件、高速相机、及磁性传感器,该激光发射组件包括第一激光器、第二激光器、及第三激光器;步骤(2):当列车的车轮经过激光发射组件对应的导轨部分上、磁性传感器感应到车轮的最低点压在第一激光器正对的导轨的位置上时,所述磁性传感器驱动高速相机对车轮的侧面进行拍照;步骤(3):所述高速相机将所拍到的照片回传至一中央处理器中进行测量;步骤(4):根据X
车轮及用于车轮的参数测量方法.pdf
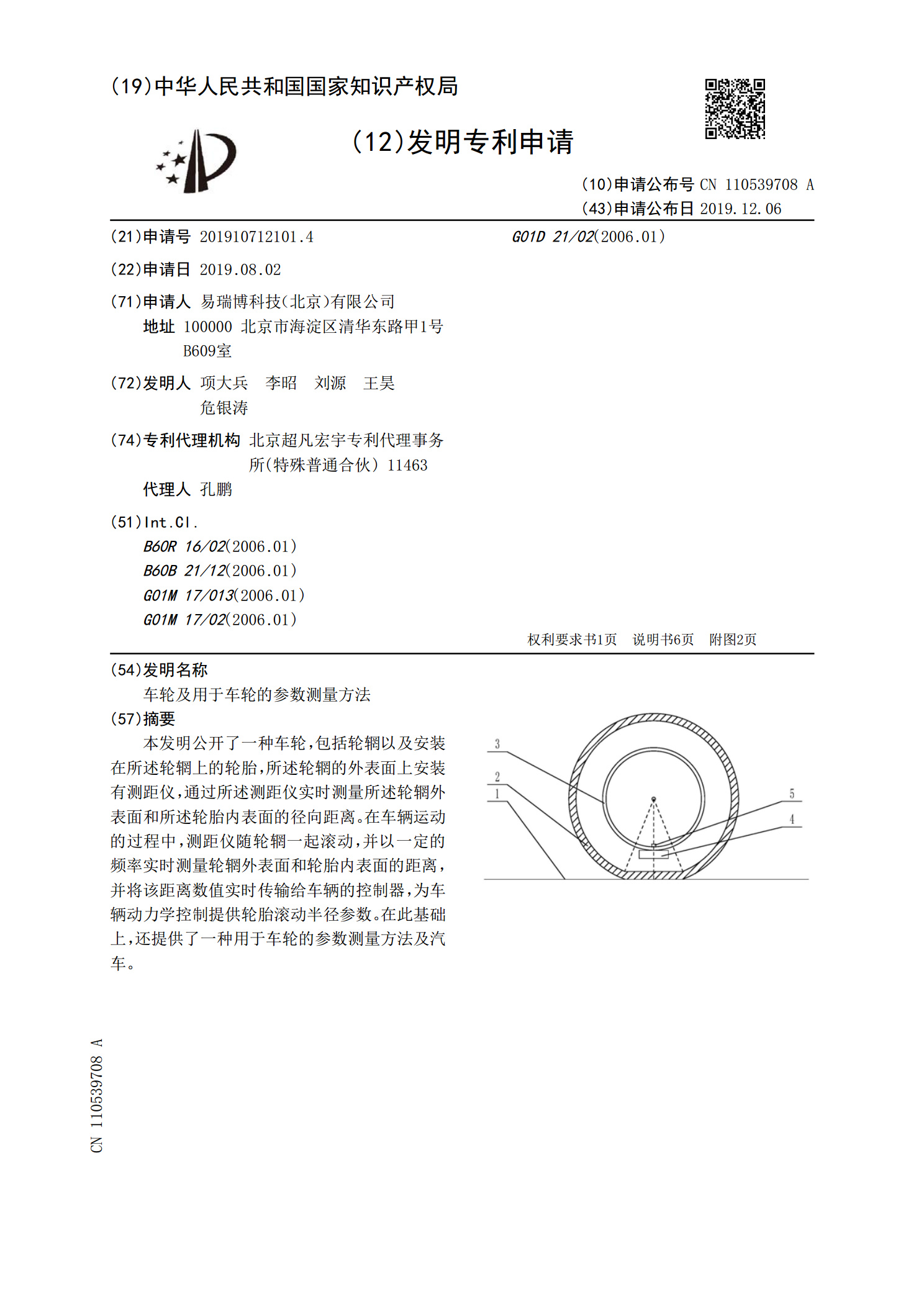
本发明公开了一种车轮,包括轮辋以及安装在所述轮辋上的轮胎,所述轮辋的外表面上安装有测距仪,通过所述测距仪实时测量所述轮辋外表面和所述轮胎内表面的径向距离。在车辆运动的过程中,测距仪随轮辋一起滚动,并以一定的频率实时测量轮辋外表面和轮胎内表面的距离,并将该距离数值实时传输给车辆的控制器,为车辆动力学控制提供轮胎滚动半径参数。在此基础上,还提供了一种用于车轮的参数测量方法及汽车。