
水质自动采样器及其工作方法.pdf

子安****吖吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水质自动采样器及其工作方法.pdf
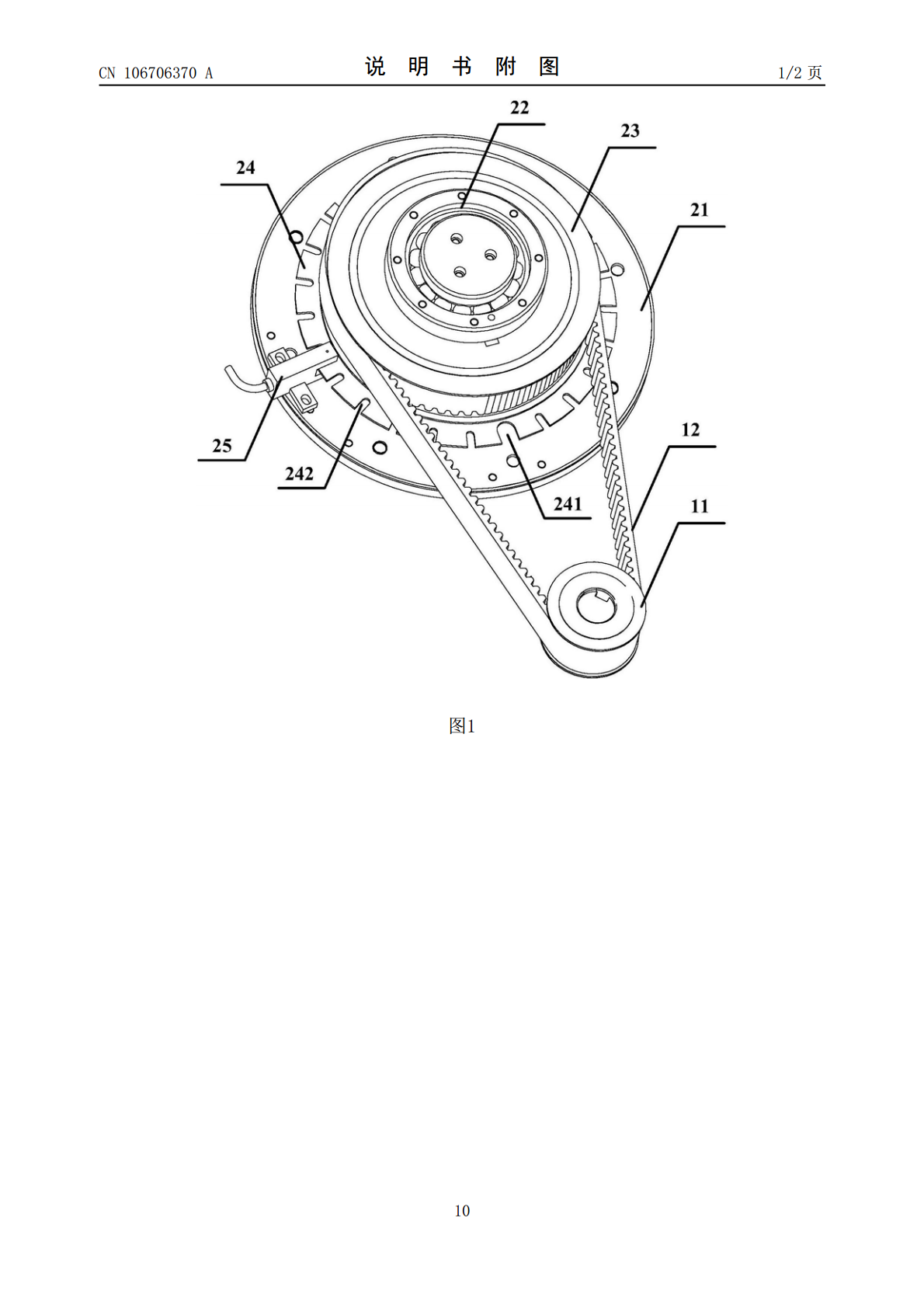
本发明涉及一种水质自动采样器,所述水质采样器包括:旋转定位装置,所述旋转定位装置包括动力机构和定位机构,所述定位机构进一步包括:固定块,设置在固定块上的旋转轴承,第一同步惰轮;定位码盘,所述定位码盘上设有狭缝,所述狭缝的位置与放置在所述旋转定位装置上的至少二个留样瓶一一对应;所述狭缝包括特征狭缝和普通狭缝,所述特征狭缝有且仅有一个;光电开关,所述光电开关固定在所述固定块上,光电开关的信号检测区域位于所述定位码盘的边缘,定位码盘在所述第一同步惰轮的带动下旋转,通过所述光电开关对所述狭缝进行定位和计数。本发明

一种AB桶型水质自动采样器.pdf
本发明公开了一种AB桶型水质自动采样器,属于水样采集循环供样技术领域。包括:箱体和设置在箱体内的样品采集装置、样品储存装置、清洗装置、留样储存装置、蠕动泵、瞬采装置、加酸固定搅拌装置和控制主板;控制主板与样品采集装置、样品储存装置、清洗装置、留样储存装置、蠕动泵、瞬采装置、加酸固定搅拌装置电连接。样品采集装置、样品储存装置、清洗装置、留样储存装置、蠕动泵、瞬采装置、加酸固定搅拌装置通过控制主板控制,控制主板执行预先植入的程序,实现水样的采集、送样检测、留存新鲜水样及自动分配水样至储存瓶的功能。

一种自动加药水质采样器及在线水质监测系统.pdf
一种自动加药水质采样器,包括采水单元、水样分配单元、留样单元、控制单元、自动加药单元,所述留样单元包括采样瓶与用于储存所述采样瓶的恒温箱,所述控制单元用于采集在线水质分析仪的超标报警信号与水质分析数据,控制所述采水单元采集水样及所述水样分配单元将所述水样导入指定的采样瓶,控制所述自动加药单元根据所述计算值向指定的所述采样瓶中添加相应的保存剂;一种在线水质监测系统,包括所述自动加药水质采样器及所述在线水质分析仪。本发明提供了一种可自动采样及加药的自动加药水质采样器及在线水质监测系统。

一种可远程监控的水质自动采样器.pdf
本发明涉及水质检测领域,尤指一种可远程监控的水质自动采样器。本发明水质自动采样器通过水泵为储备瓶中添加检测过的水质,从而完成留样;而蠕动泵其中一组输出端通过波纹管与注水头相连接,便于储备瓶中的溶液再次提取进行复检,进而便于人们的抽样调查;其中,第二旋转电机带动搅拌叶进行旋转,能够对多组进水管抽进不同深度的水质进行混合,从而提高检测的准确性;此外,还可以通过客户端进行远程监控水质自动采样器的数据,利用4G网络运行具有大范围监控范围,可以对采集水样进行远程实时检测,并对收集的数据保留处理,不仅操作方便,而且工

一种低温环境自密封型水质自动采样器.pdf
本发明提供了一种低温环境自密封型水质自动采样器,包括顶架和低温冷藏箱,顶架固定在低温冷藏箱的顶端,位于低温冷藏箱内设有水平延伸的采样板,位于采样板上方设有可三维移动的移动台,移动台可三维滑动的滑块上固定竖板,沿着竖板配装有竖向齿条,竖向齿条与移动台的Z轴在竖直方向上交叠,竖板的一侧固定有竖向电机,位于竖向齿条上配装有相啮合的齿条驱动件,在齿条驱动件的下方设有用于夹取瓶盖的自动夹手,竖向电机与齿条驱动件联动,自动夹手预留有供竖向齿条竖直滑移穿过的空腔,所述的自动夹手固定在所述的Z轴的底端,位于顶架中设有蠕动