
一种侧翻预警系统及其预警方法.pdf

一只****呀9


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种侧翻预警系统及其预警方法.pdf
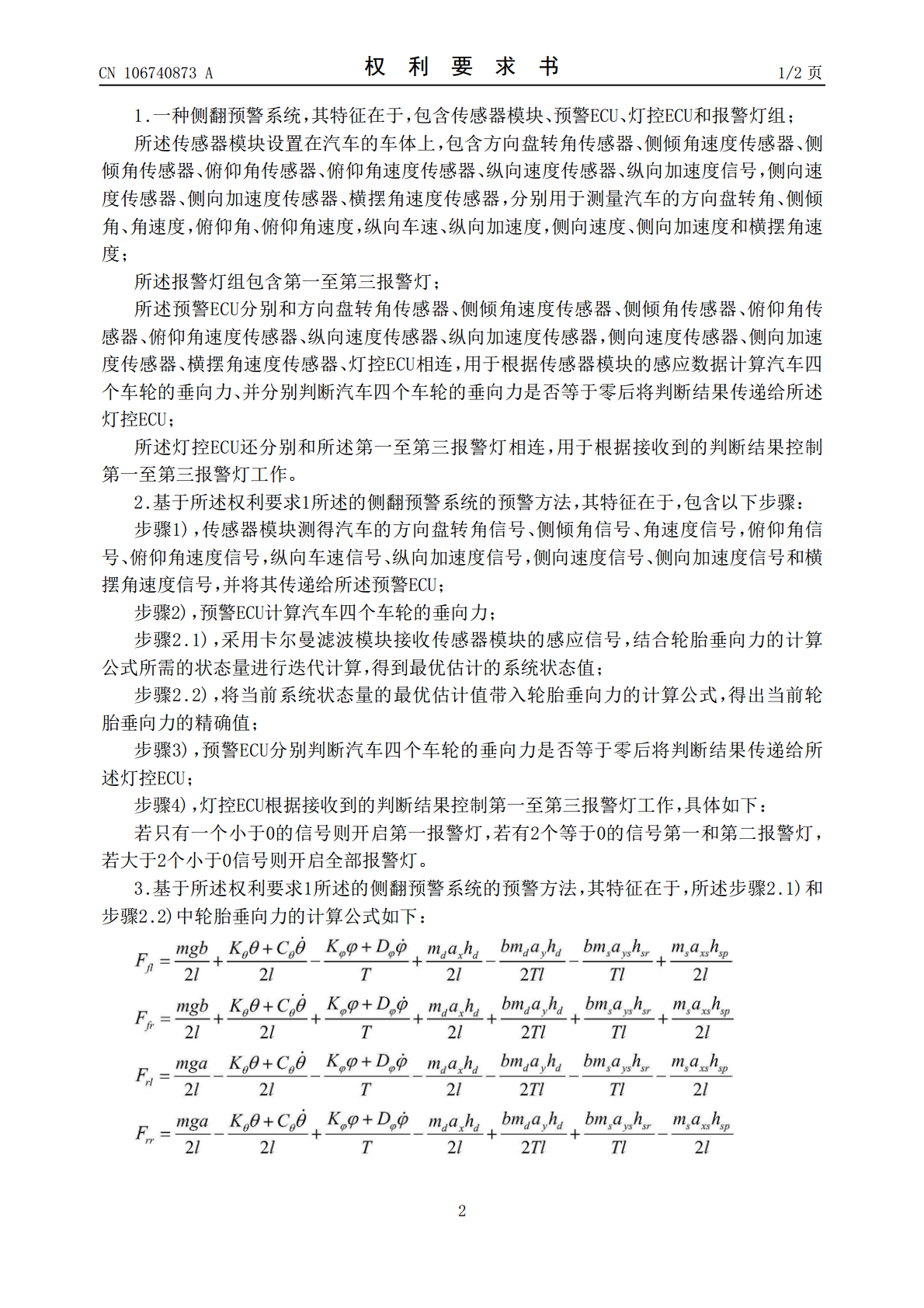
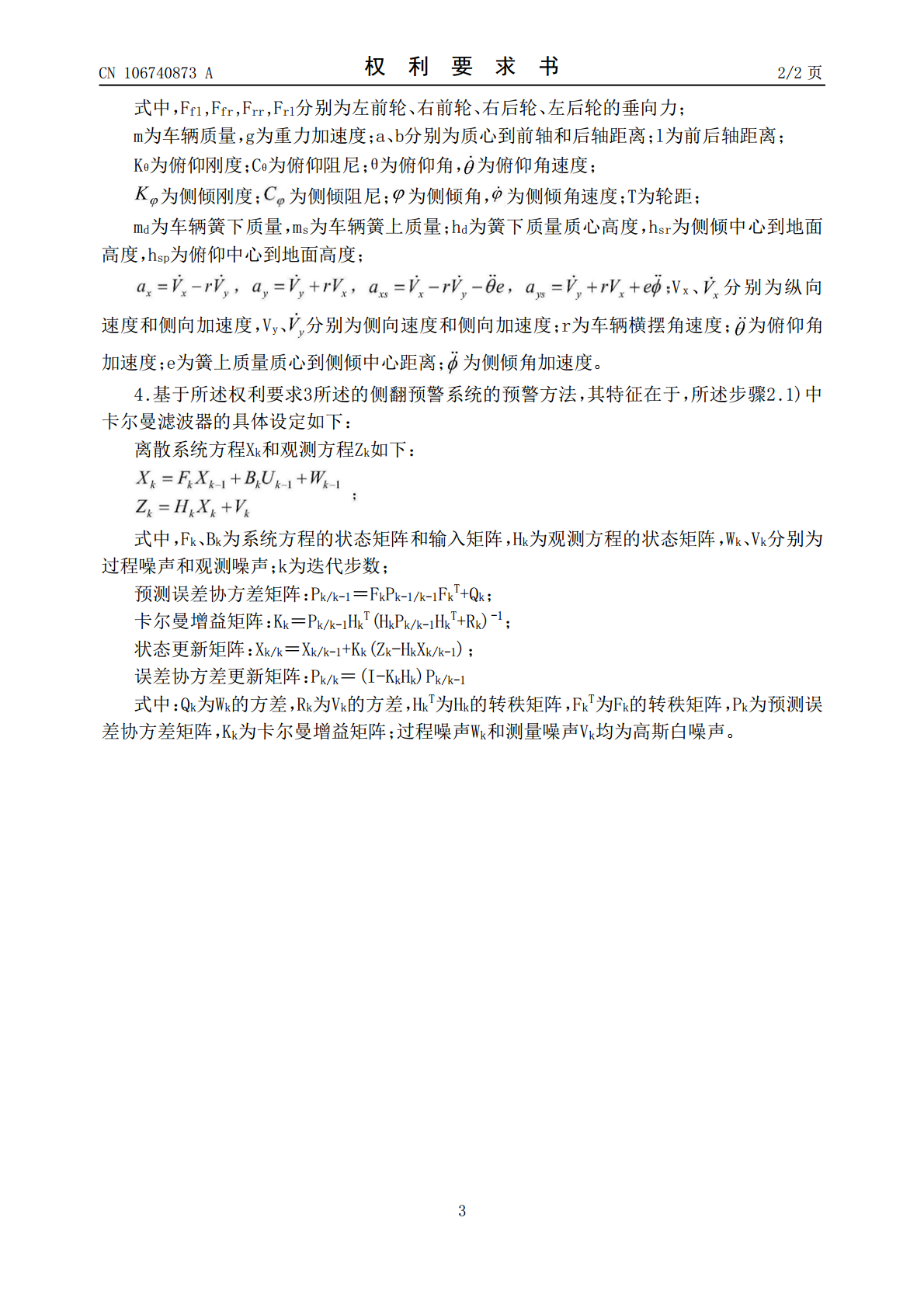
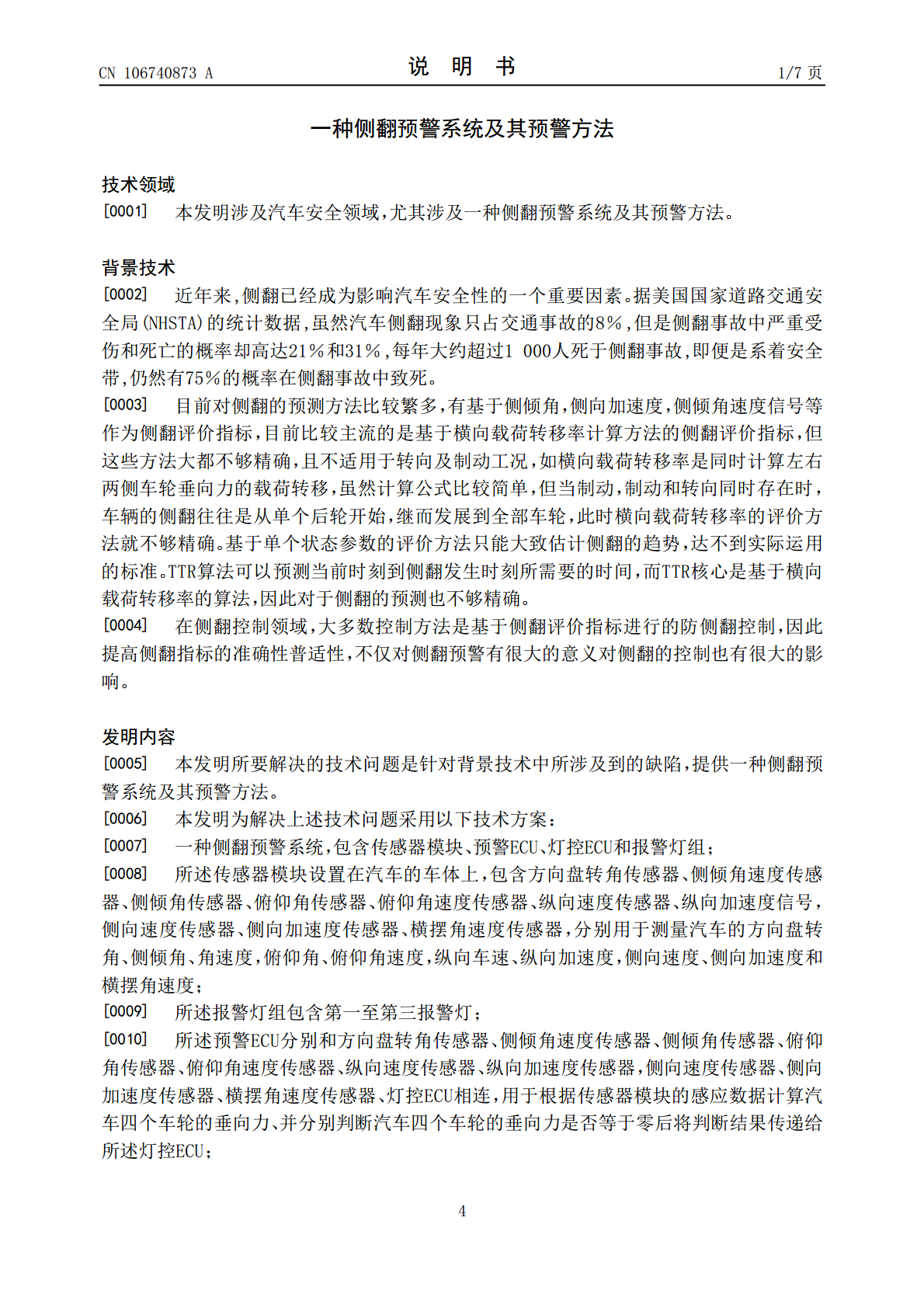
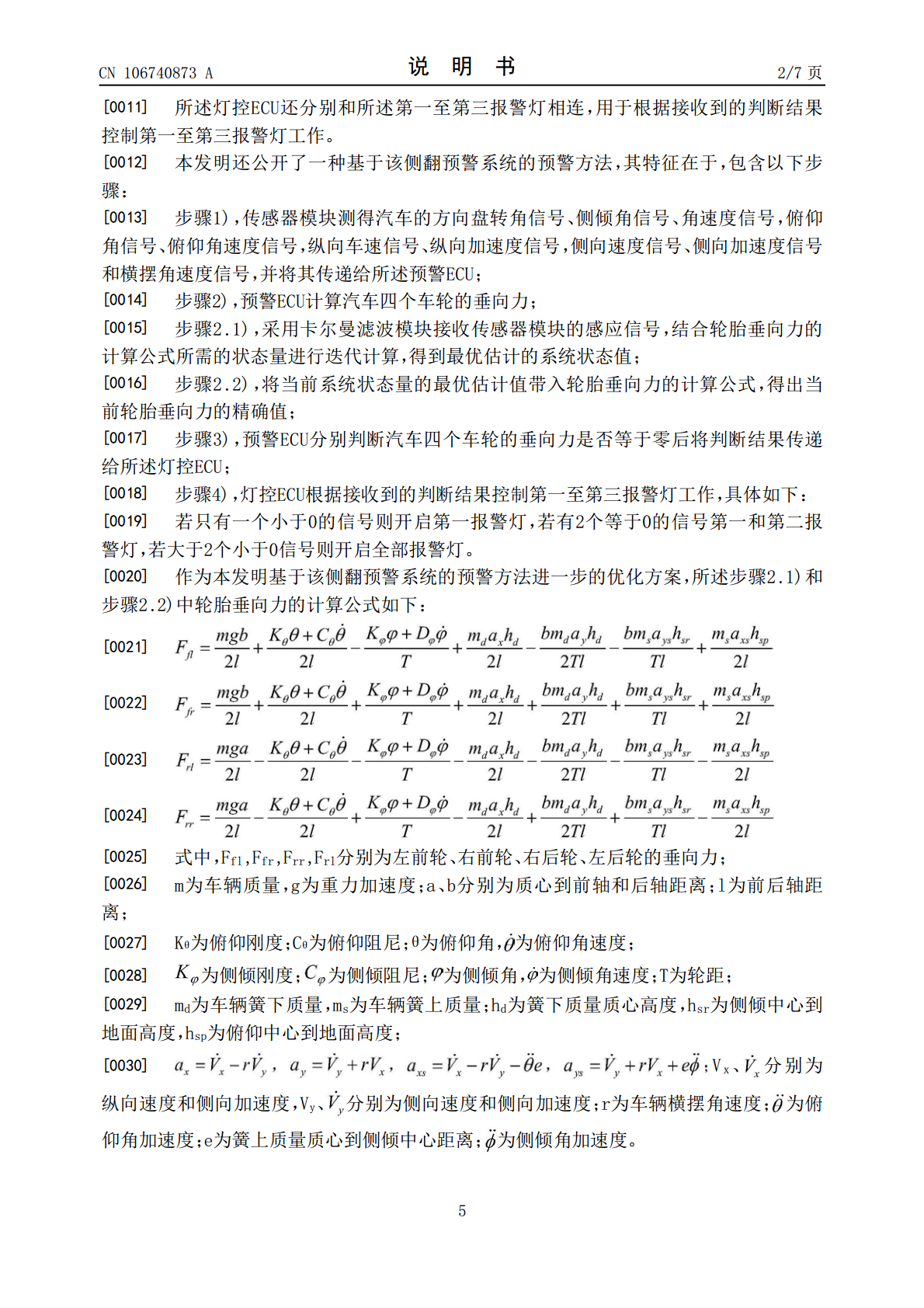
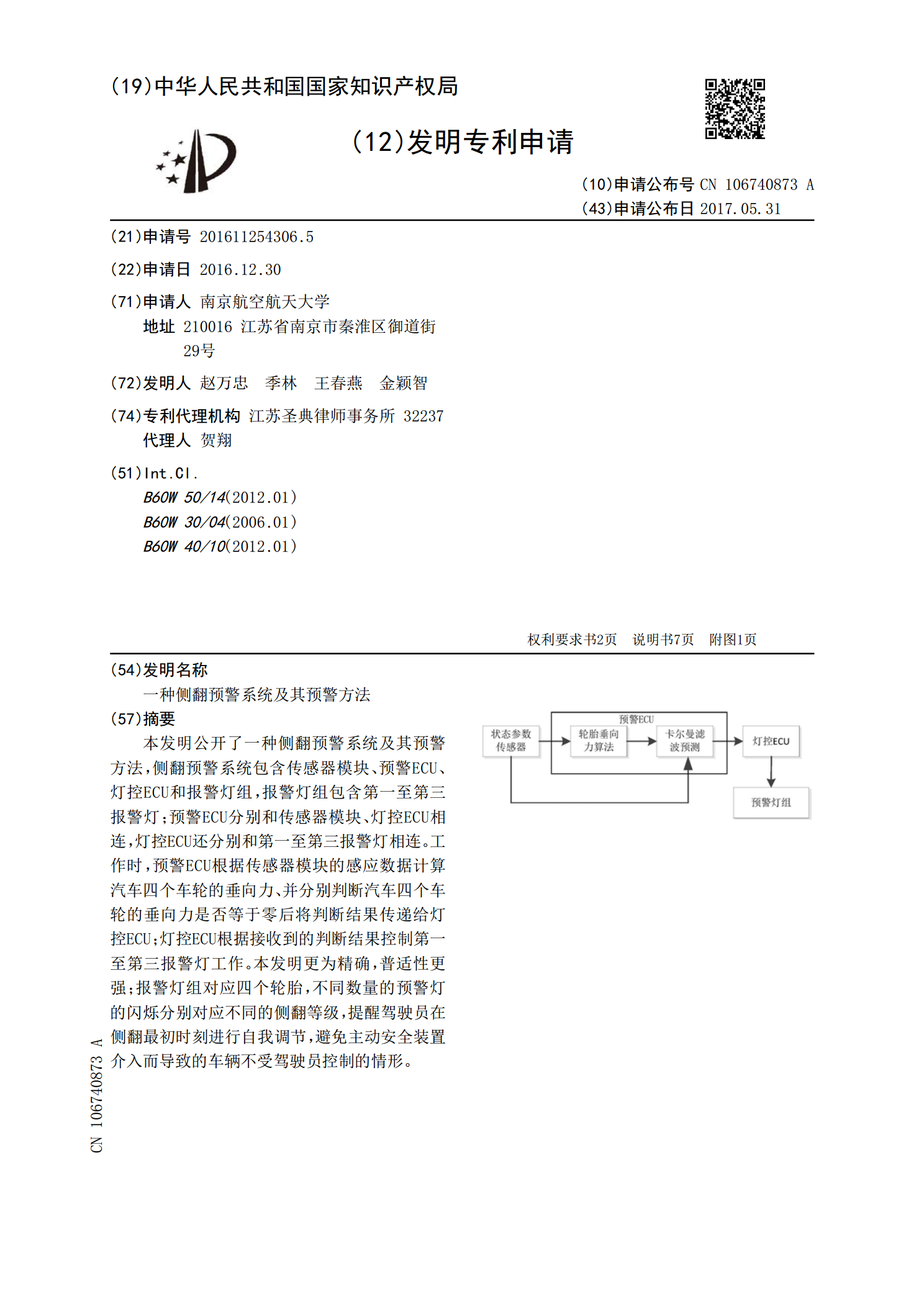
本发明公开了一种侧翻预警系统及其预警方法,侧翻预警系统包含传感器模块、预警ECU、灯控ECU和报警灯组,报警灯组包含第一至第三报警灯;预警ECU分别和传感器模块、灯控ECU相连,灯控ECU还分别和第一至第三报警灯相连。工作时,预警ECU根据传感器模块的感应数据计算汽车四个车轮的垂向力、并分别判断汽车四个车轮的垂向力是否等于零后将判断结果传递给灯控ECU;灯控ECU根据接收到的判断结果控制第一至第三报警灯工作。本发明更为精确,普适性更强;报警灯组对应四个轮胎,不同数量的预警灯的闪烁分别对应不同的侧翻等级,提
一种重型卡车弯道防侧翻预警系统.pdf
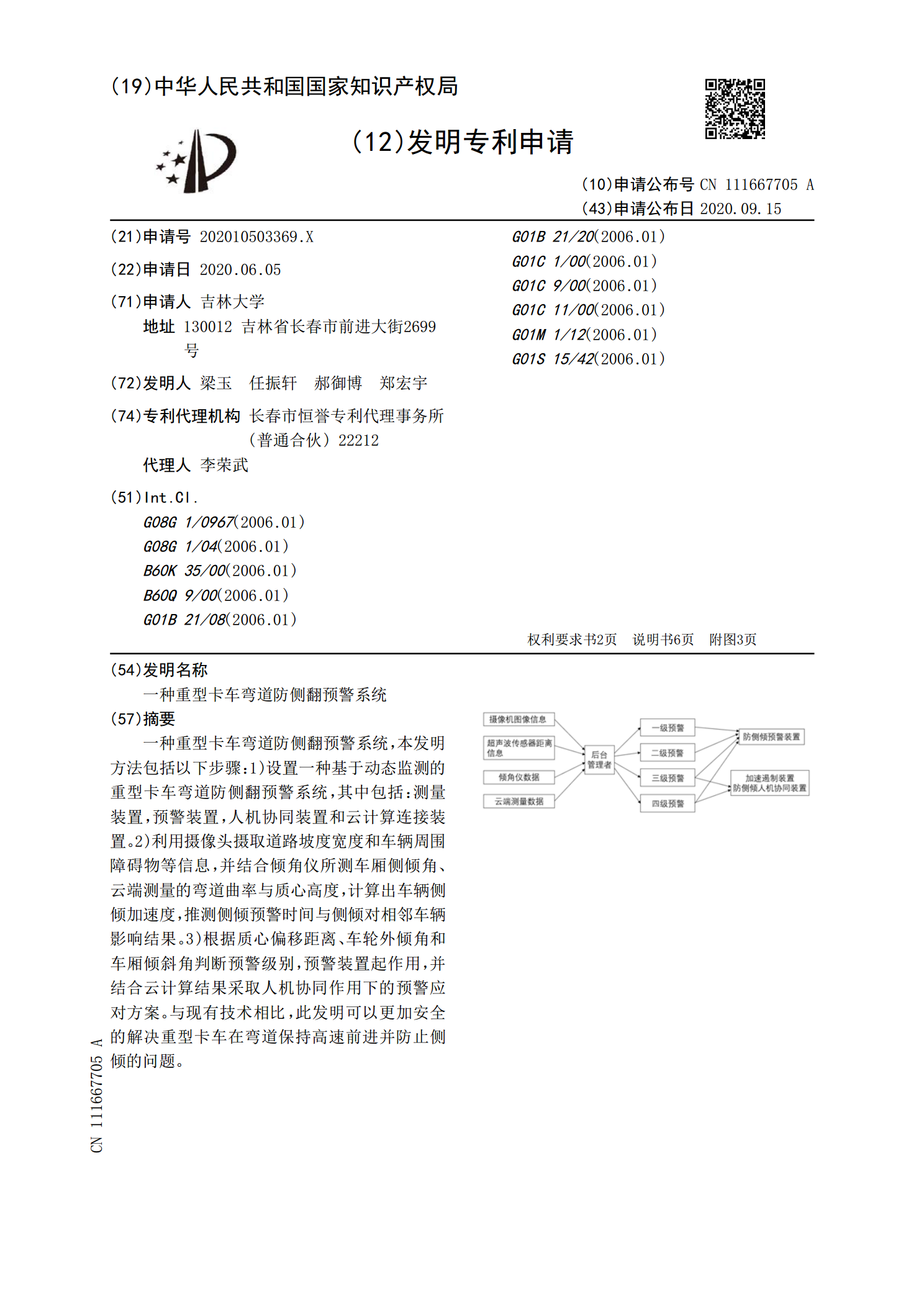
一种重型卡车弯道防侧翻预警系统,本发明方法包括以下步骤:1)设置一种基于动态监测的重型卡车弯道防侧翻预警系统,其中包括:测量装置,预警装置,人机协同装置和云计算连接装置。2)利用摄像头摄取道路坡度宽度和车辆周围障碍物等信息,并结合倾角仪所测车厢侧倾角、云端测量的弯道曲率与质心高度,计算出车辆侧倾加速度,推测侧倾预警时间与侧倾对相邻车辆影响结果。3)根据质心偏移距离、车轮外倾角和车厢倾斜角判断预警级别,预警装置起作用,并结合云计算结果采取人机协同作用下的预警应对方案。与现有技术相比,此发明可以更加安全的解决
一种货车侧翻预警装置及方法.pdf
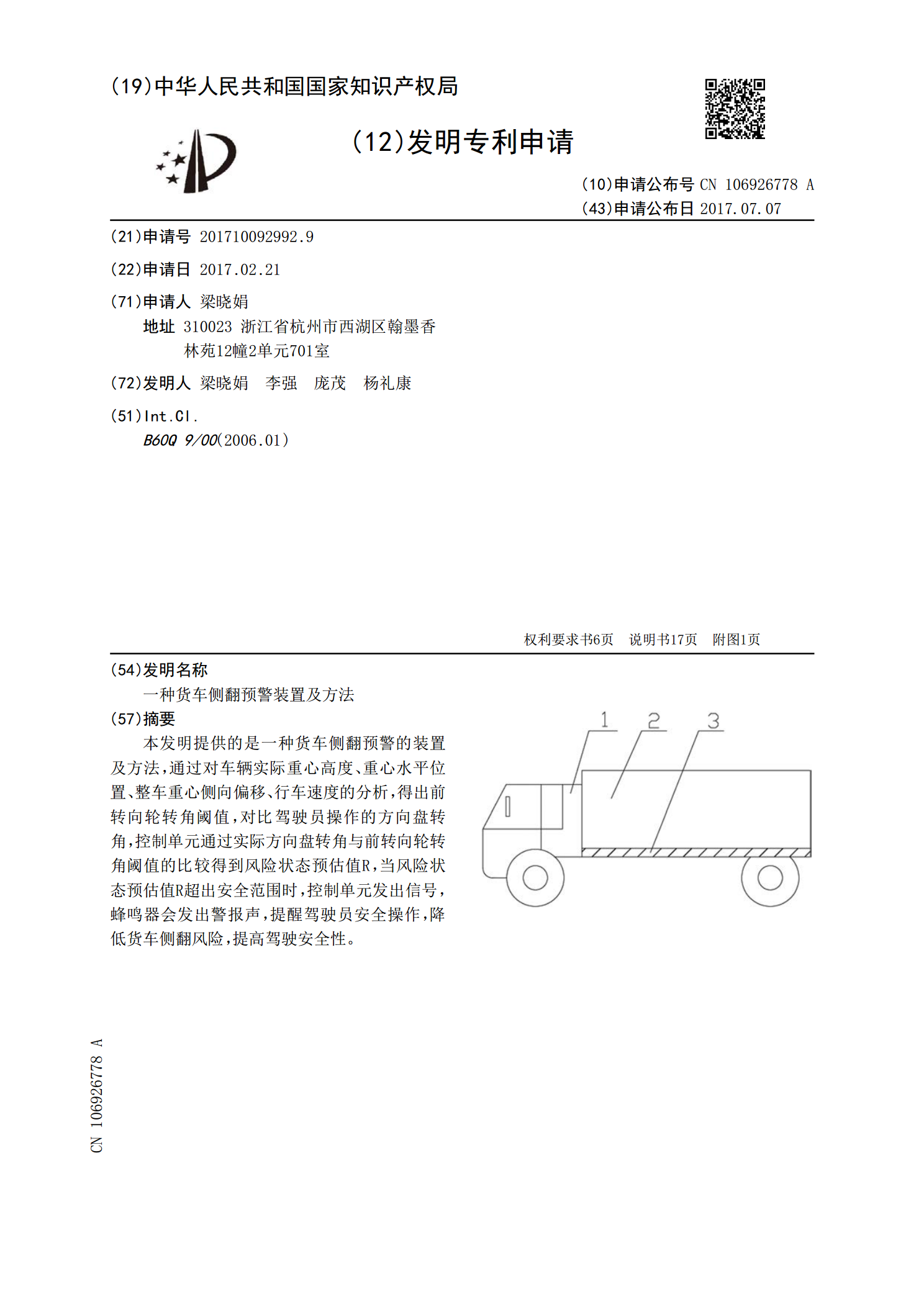
本发明提供的是一种货车侧翻预警的装置及方法,通过对车辆实际重心高度、重心水平位置、整车重心侧向偏移、行车速度的分析,得出前转向轮转角阈值,对比驾驶员操作的方向盘转角,控制单元通过实际方向盘转角与前转向轮转角阈值的比较得到风险状态预估值R,当风险状态预估值R超出安全范围时,控制单元发出信号,蜂鸣器会发出警报声,提醒驾驶员安全操作,降低货车侧翻风险,提高驾驶安全性。
一种大型客车侧翻预警装置及方法.pdf
本发明提供的是一种大型客车侧翻预警的装置及方法,通过对车辆实际质心高度和水平位置,行车速度的分析,得出驾驶员操作的方向盘转角阈值,更直接的体现出怎么样的操作是安全的,使得驾驶员更能体会的到安全的方向盘转角,提高驾驶安全性。当方向盘转角超出安全范围时,控制单元发出信号,蜂鸣器会发出警报声,提醒驾驶员安全操作,降低客车侧翻风险。
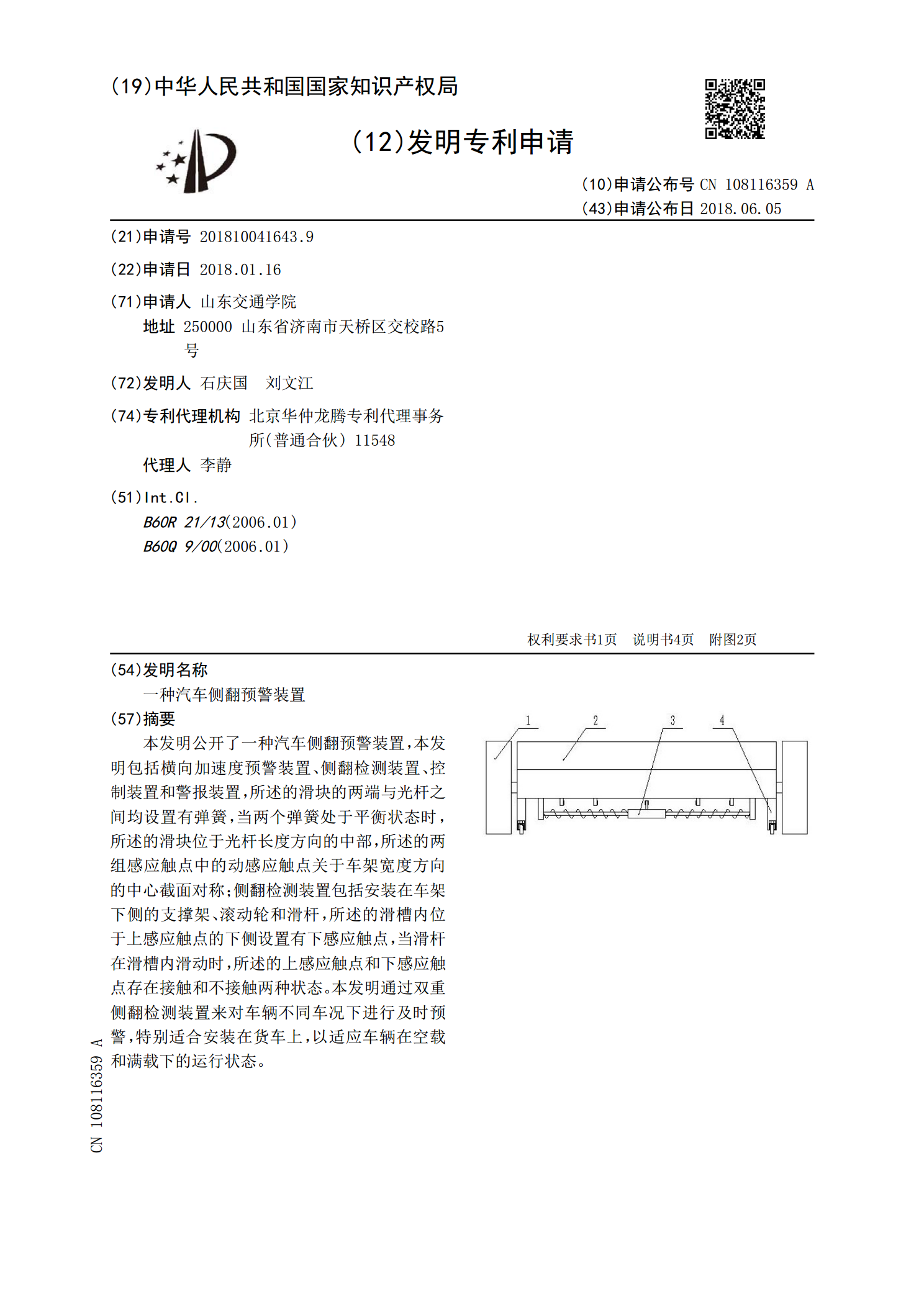
一种汽车侧翻预警装置.pdf
本发明公开了一种汽车侧翻预警装置,本发明包括横向加速度预警装置、侧翻检测装置、控制装置和警报装置,所述的滑块的两端与光杆之间均设置有弹簧,当两个弹簧处于平衡状态时,所述的滑块位于光杆长度方向的中部,所述的两组感应触点中的动感应触点关于车架宽度方向的中心截面对称;侧翻检测装置包括安装在车架下侧的支撑架、滚动轮和滑杆,所述的滑槽内位于上感应触点的下侧设置有下感应触点,当滑杆在滑槽内滑动时,所述的上感应触点和下感应触点存在接触和不接触两种状态。本发明通过双重侧翻检测装置来对车辆不同车况下进行及时预警,特别适合安