
X光机、X光机旋转中心调整方法及装置.pdf

慧红****ad

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
X光机、X光机旋转中心调整方法及装置.pdf
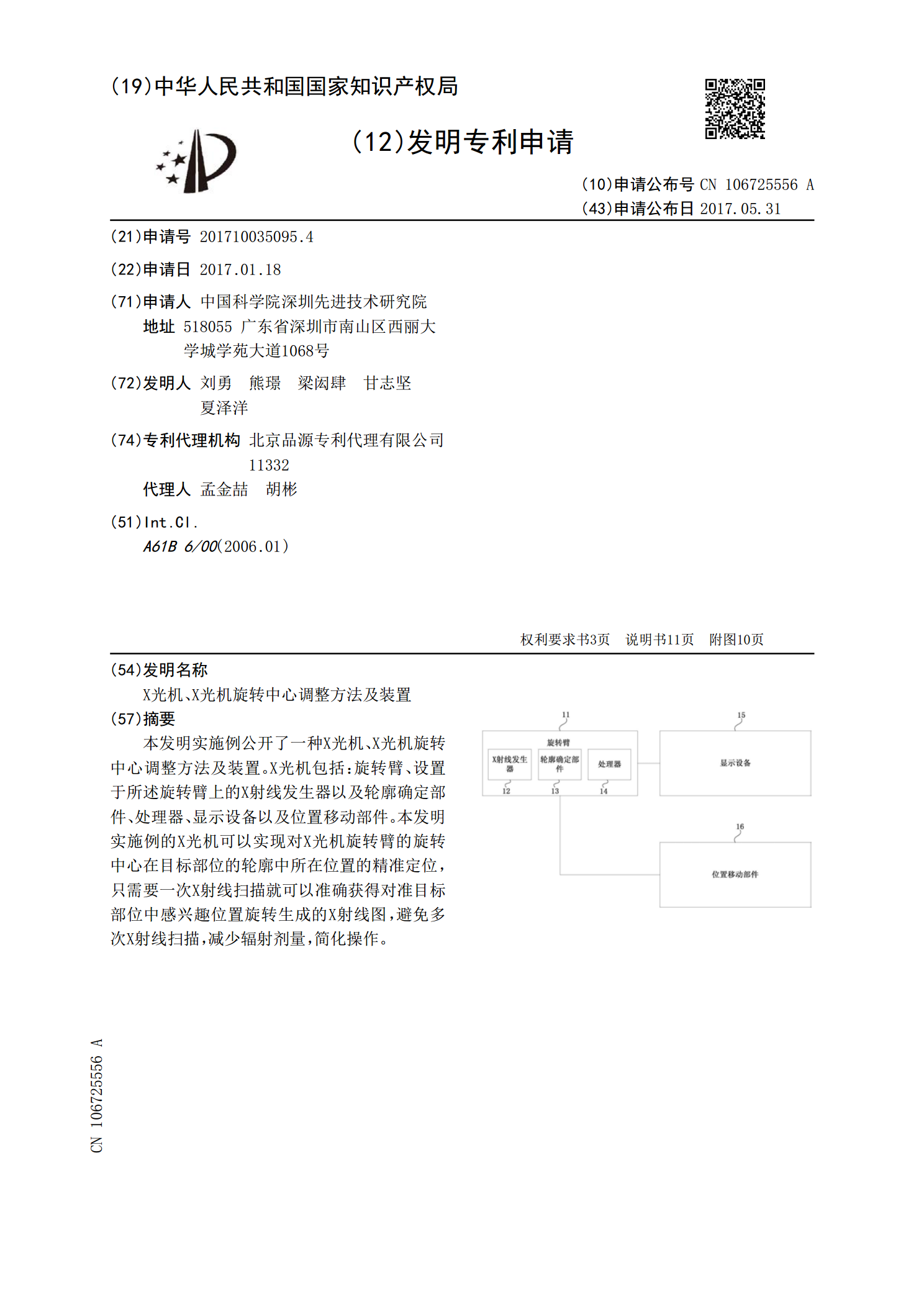
本发明实施例公开了一种X光机、X光机旋转中心调整方法及装置。X光机包括:旋转臂、设置于所述旋转臂上的X射线发生器以及轮廓确定部件、处理器、显示设备以及位置移动部件。本发明实施例的X光机可以实现对X光机旋转臂的旋转中心在目标部位的轮廓中所在位置的精准定位,只需要一次X射线扫描就可以准确获得对准目标部位中感兴趣位置旋转生成的X射线图,避免多次X射线扫描,减少辐射剂量,简化操作。
X光机及用于X光机的激光定位装置.pdf
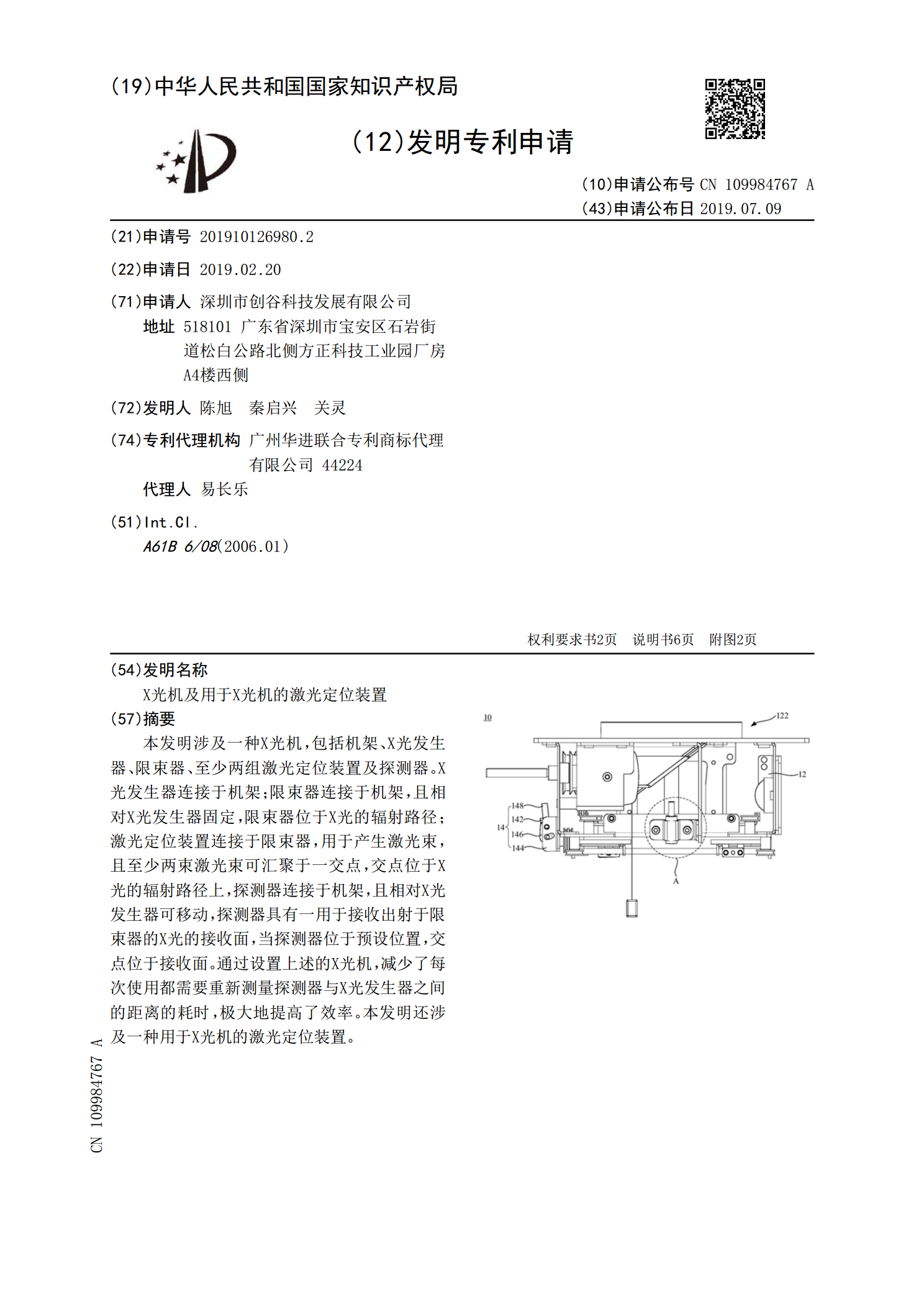
本发明涉及一种X光机,包括机架、X光发生器、限束器、至少两组激光定位装置及探测器。X光发生器连接于机架;限束器连接于机架,且相对X光发生器固定,限束器位于X光的辐射路径;激光定位装置连接于限束器,用于产生激光束,且至少两束激光束可汇聚于一交点,交点位于X光的辐射路径上,探测器连接于机架,且相对X光发生器可移动,探测器具有一用于接收出射于限束器的X光的接收面,当探测器位于预设位置,交点位于接收面。通过设置上述的X光机,减少了每次使用都需要重新测量探测器与X光发生器之间的距离的耗时,极大地提高了效率。本发明还

乳腺X光机等中心旋转系统.pdf
本发明是关于一种乳腺X光机等中心旋转系统,包括动力元件、与动力元件连接的传动组件,传动组件与C形臂连接,传动组件包括与C形臂连接并驱动C形臂动作的环面蜗轮蜗杆传动装置,环面蜗轮蜗杆传动装置包括蜗杆、蜗轮;由于采用环面蜗轮蜗杆传动装置驱动C形臂动作,其传动方式为多齿啮合传动,故传动平稳、噪音很小;传动时接触齿数多、齿面接触面较大;并有瞬时双线接触、接触线总长度长、综合曲率半径大、接触应力小、啮合润滑角大,啮合中容易形成动压油膜,减少齿面磨损;当量曲率半径大,因而传动效率较高,承载能力大;另环面蜗

乳腺X光机的旋转限位机构.pdf
本发明公开一种乳腺X光机的旋转限位机构,包括由电机驱动旋转的C臂及通过旋转主轴与C臂连接的升降部;连接在旋转主轴末端的限位齿轮,固定在升降部上的固定限位块,且限位齿轮与固定限位块的相对内侧面分别设有第一圆弧形凹槽及第二圆弧形凹槽,在在第一圆弧形凹槽与第二圆弧形凹槽之间设置旋转限位块;固定在升降部上的传动齿轮和齿条,传动齿轮与限位齿轮啮合连接,且传动齿轮与齿条构成齿轮-齿条传动连接;一对分别设置在齿条两末端的用于控制电机工作的限位开关。本发明旋转范围可大于360°,且具有较高的稳定性与可靠性。
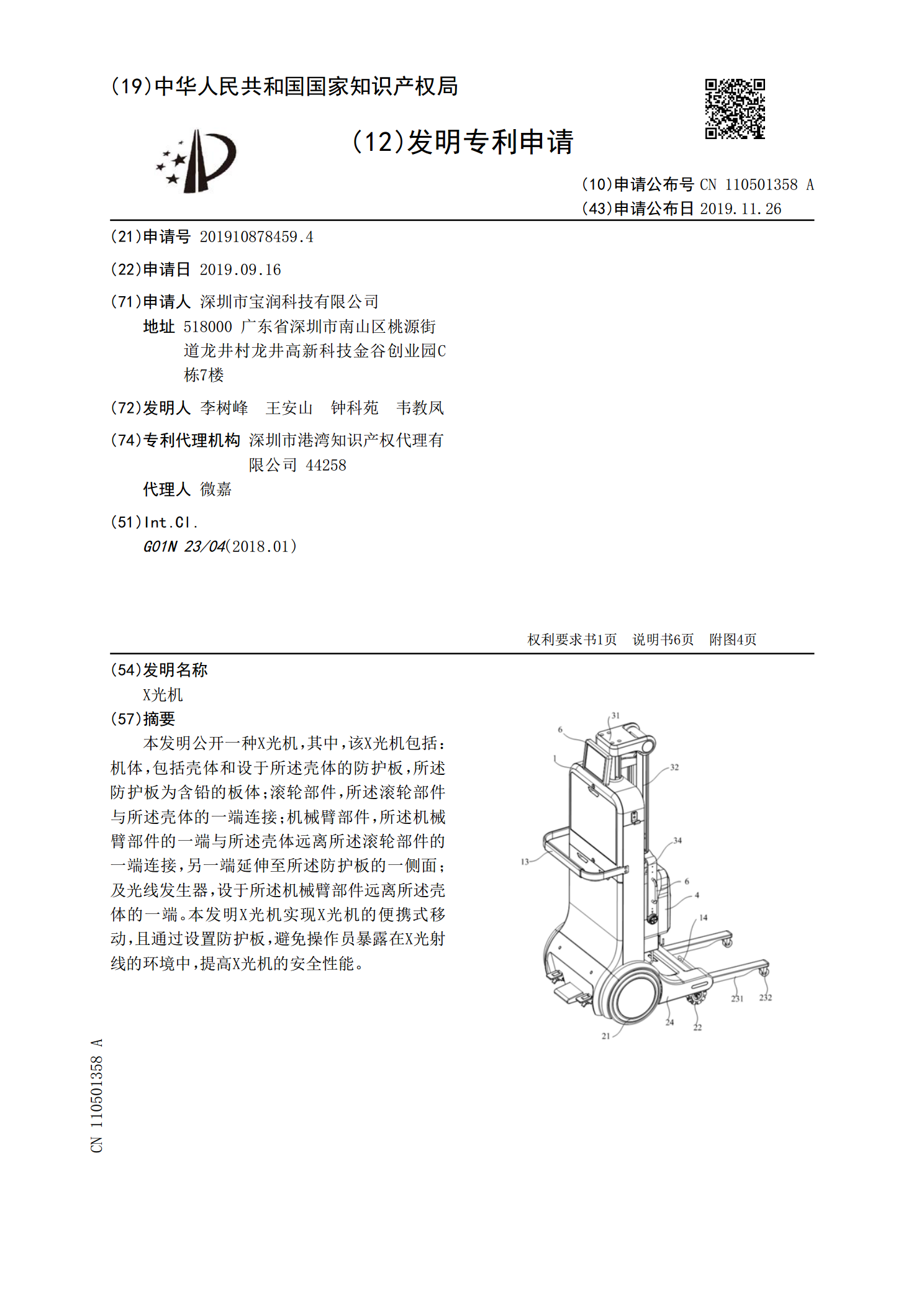
X光机.pdf
本发明公开一种X光机,其中,该X光机包括:机体,包括壳体和设于所述壳体的防护板,所述防护板为含铅的板体;滚轮部件,所述滚轮部件与所述壳体的一端连接;机械臂部件,所述机械臂部件的一端与所述壳体远离所述滚轮部件的一端连接,另一端延伸至所述防护板的一侧面;及光线发生器,设于所述机械臂部件远离所述壳体的一端。本发明X光机实现X光机的便携式移动,且通过设置防护板,避免操作员暴露在X光射线的环境中,提高X光机的安全性能。