
一种行星轮滚动摩擦传动装置.pdf

一只****签网

1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种行星轮滚动摩擦传动装置.pdf
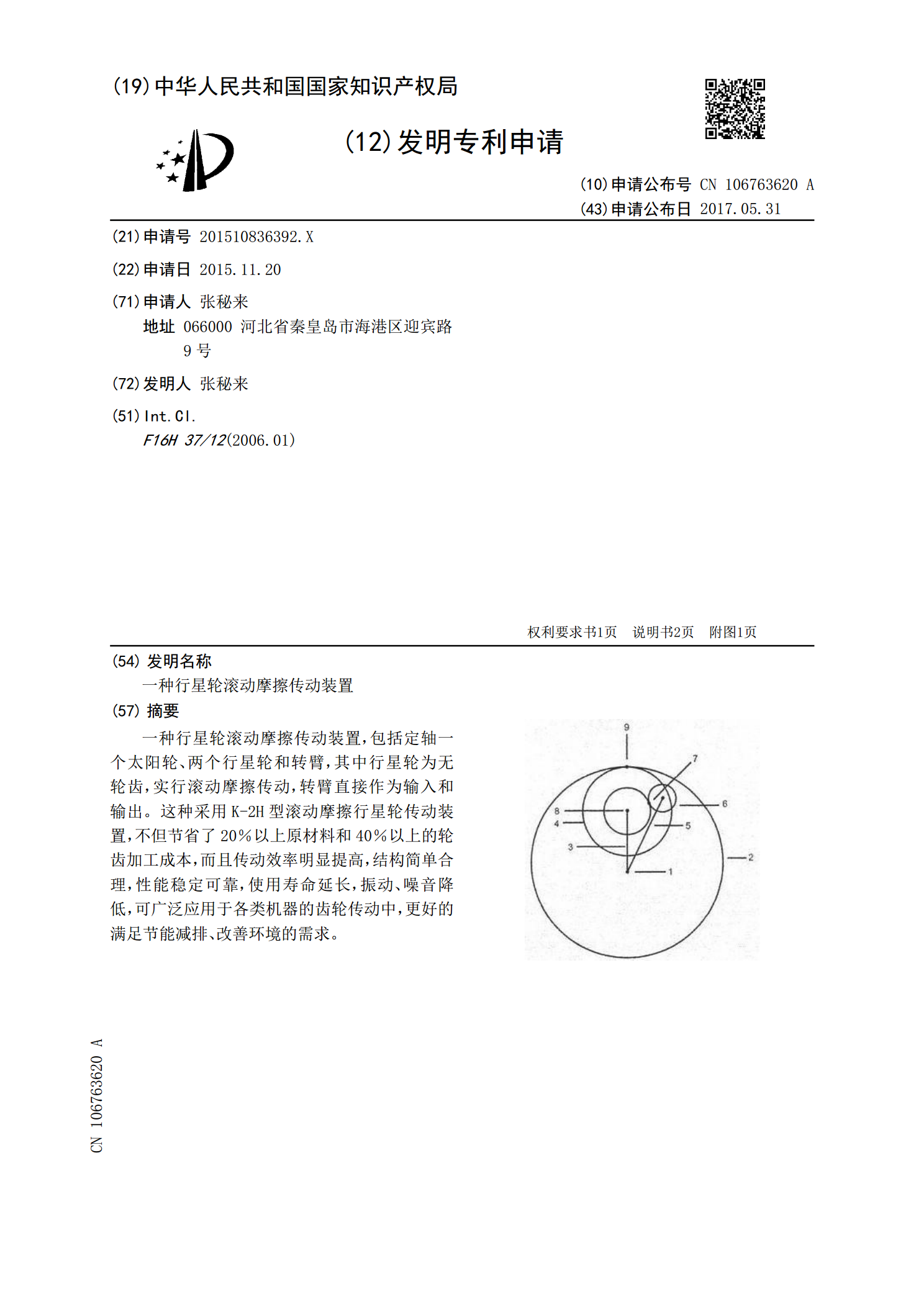
一种行星轮滚动摩擦传动装置,包括定轴一个太阳轮、两个行星轮和转臂,其中行星轮为无轮齿,实行滚动摩擦传动,转臂直接作为输入和输出。这种采用K-2H型滚动摩擦行星轮传动装置,不但节省了20%以上原材料和40%以上的轮齿加工成本,而且传动效率明显提高,结构简单合理,性能稳定可靠,使用寿命延长,振动、噪音降低,可广泛应用于各类机器的齿轮传动中,更好的满足节能减排、改善环境的需求。

行星轮传动装置.pdf
本发明公开了一种行星轮传动装置,包括箱体和位于箱体内的行星轮传动系,行星轮传动系包括动力输入轴、太阳轮、行星轮、行星架、内齿圈和动力输出轴,太阳轮与动力输入轴在圆周方向固定配合,行星架与动力输出轴在圆周方向固定配合,内齿圈与箱体之间活动配合,在内齿圈与箱体之间设置至少一个过载保护弹簧,过载保护弹簧的预紧力或预紧力的切向分力方向与行星架的输出转矩方向相反,本发明当输入转矩与行星系数比的乘积大于弹簧预紧力时,行星架与行星传动输出箱体存在相对运动,将过载能量储存在过载保护弹簧中,能够有效降低啮合冲击

一种多行星轮系传动装置.pdf
多行星轮系传动装置,是两个或两个以上行星轮系构成的传动系统。根据行星轮既自转又公转,轮上各点是较为复杂的平面曲线运动轨迹,通过受力角的选择、转矩的改变、多轮系的联动,实现了系统内传动的省力,减少了输入能耗,提高传动效率。这种多行星轮系传动装置节能效果显著,结构简单明了,是继目前广泛使用的带传动、链条传动、齿轮传动、涡轮蜗杆传动等传统传动形式的全新传动形式,可广泛应用于各种动力机器(内燃机、蒸汽机、发电机等)、运输机器(汽车、起重机、输送机等)、加工机器(机床、纺织机、包装机、缝纫机等)的轮系传动中。
一种行星轮传动装置及一种电机.pdf
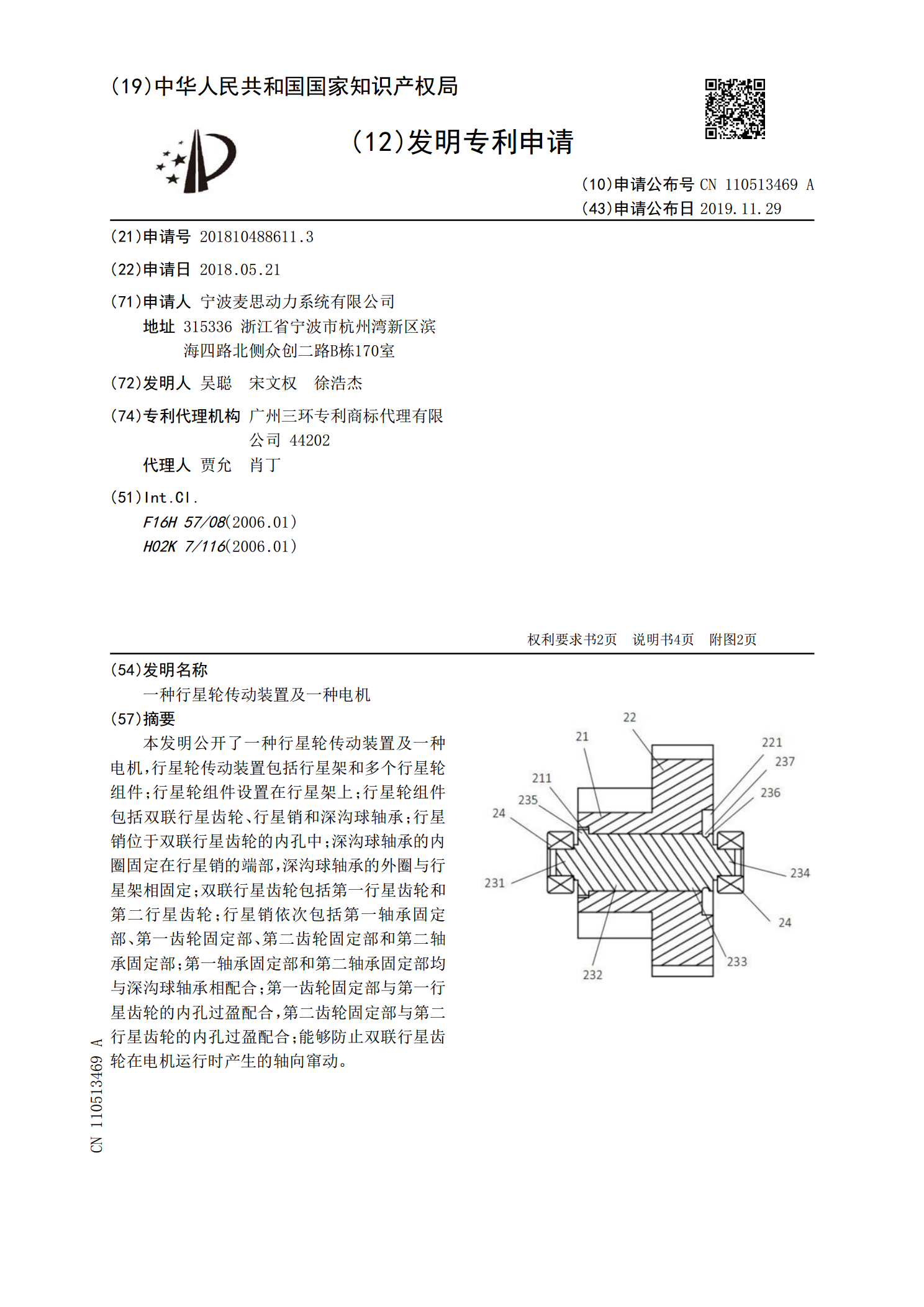
本发明公开了一种行星轮传动装置及一种电机,行星轮传动装置包括行星架和多个行星轮组件;行星轮组件设置在行星架上;行星轮组件包括双联行星齿轮、行星销和深沟球轴承;行星销位于双联行星齿轮的内孔中;深沟球轴承的内圈固定在行星销的端部,深沟球轴承的外圈与行星架相固定;双联行星齿轮包括第一行星齿轮和第二行星齿轮;行星销依次包括第一轴承固定部、第一齿轮固定部、第二齿轮固定部和第二轴承固定部;第一轴承固定部和第二轴承固定部均与深沟球轴承相配合;第一齿轮固定部与第一行星齿轮的内孔过盈配合,第二齿轮固定部与第二行星齿轮的内孔

抗冲击行星轮传动装置.pdf
本发明涉及机械减速技术领域,一种抗冲击行星轮传动装置,由太阳轮轴、行星架、端盖、行星轮、机座、输出轴及内齿圈组成,其特征在于:内齿圈与机座内孔滑动配合,依靠滑动面上均布的金属弹性薄壁管联接在机座内孔,金属弹性薄壁管内装有减振材料橡胶芯棒。有益效果:本发明比之背景技术《行星轮传动装置动》200910103829.3,其创造性在于:(1)结构紧凑、简单、机加工工艺性能好;(2)外型尺寸小41-50%、重量轻、制造成本低;(3)内齿圈外圆与机座内孔滑动配合,且滑动配合面上均布骑缝金属弹性薄壁管,管内再装橡胶芯棒