
一种改进的高效纯机械式换向机构.pdf

猫巷****傲柏

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种改进的高效纯机械式换向机构.pdf
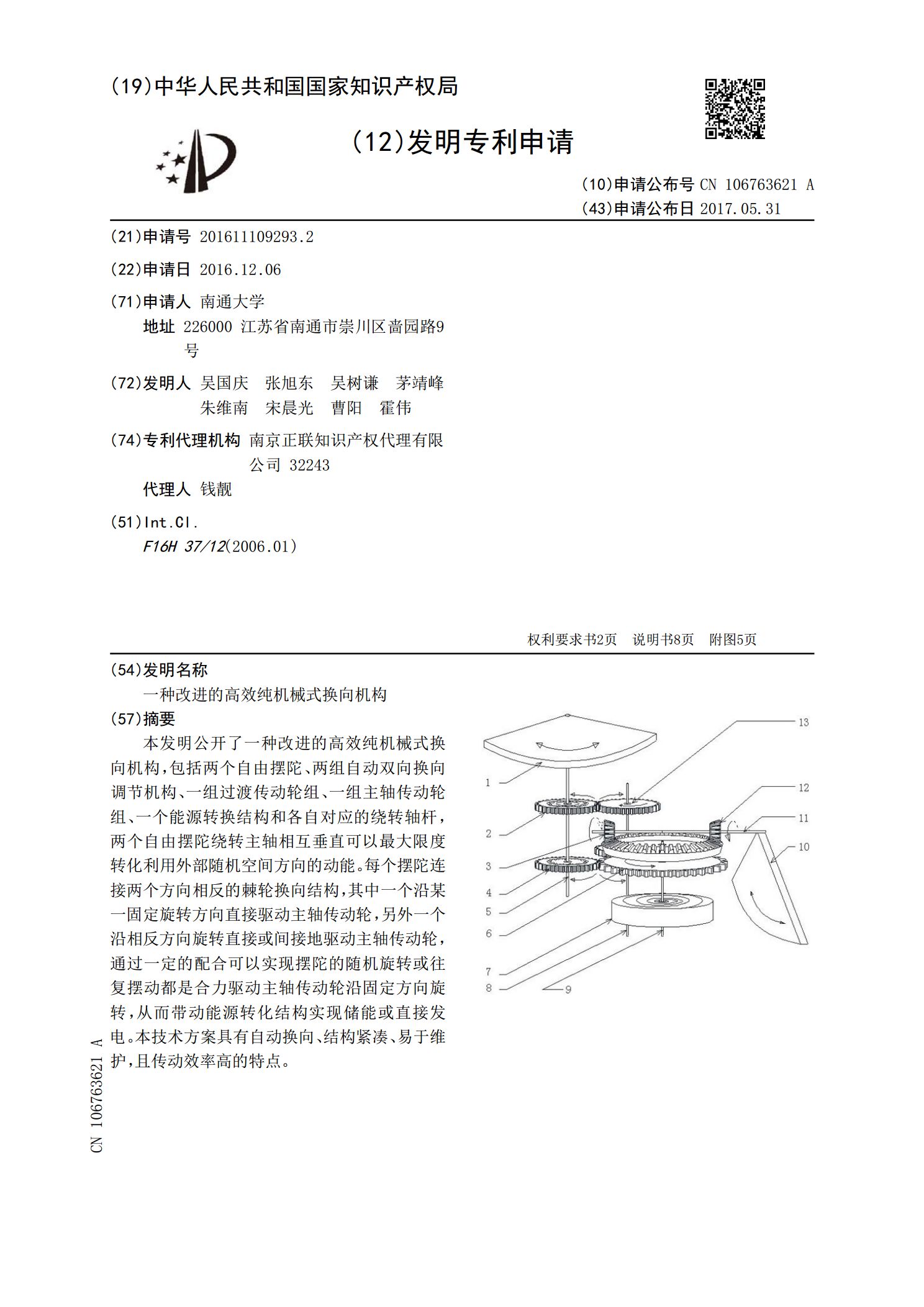
本发明公开了一种改进的高效纯机械式换向机构,包括两个自由摆陀、两组自动双向换向调节机构、一组过渡传动轮组、一组主轴传动轮组、一个能源转换结构和各自对应的绕转轴杆,两个自由摆陀绕转主轴相互垂直可以最大限度转化利用外部随机空间方向的动能。每个摆陀连接两个方向相反的棘轮换向结构,其中一个沿某一固定旋转方向直接驱动主轴传动轮,另外一个沿相反方向旋转直接或间接地驱动主轴传动轮,通过一定的配合可以实现摆陀的随机旋转或往复摆动都是合力驱动主轴传动轮沿固定方向旋转,从而带动能源转化结构实现储能或直接发电。本技术方案具有自

一种高效纯机械式换向机构.pdf
本发明公开了一种高效纯机械式换向机构,包括两个自由摆陀、两组自动双向换向调节机构、两组过渡传动轮组、一个主轴传动轮、一个能源转换结构,两个自由摆陀绕转主轴相互垂直可以最大限度转化利用外部随机空间方向的动能。每个自由摆陀连接两个方向相反的棘轮换向结构,其中一个沿某一固定旋转方向直接驱动主轴传动轮,另外一个沿相反方向旋转直接或间接地驱动主轴传动轮,通过一定的配合可以实现摆陀的随机旋转或往复摆动都是合力驱动主轴传动轮沿固定方向旋转,从而带动能源转化结构实现储能或直接发电。本技术方案具有自动换向、结构紧凑、易于维

一种机械式自动换向机构.pdf
本发明公开了一种机械式自动换向机构,包括工作台;牵引链条;垂直滑块,贯穿在垂直导向槽中,并可沿垂直导向槽上下滑动;垂直滑块的上端安装有上齿板,垂直滑块的下端安装有下齿板;水平滑块,安装有第一顶升装置和第二顶升装置,当水平滑块上的第一顶升装置进入第二水平槽,第二顶升装置脱离第二水平槽,第一顶升装置将垂直滑块向上顶起,以使上齿板与第一链条段啮合;当水平滑块上的第二顶升装置进入第二水平槽,第一顶升装置脱离第二水平槽,第二顶升装置将垂直滑块向下顶起,以使下齿板板与第二链条段啮合。本发明的换向机构采用纯机械结构,在
一种机械式换向的单向行驶机构.pdf
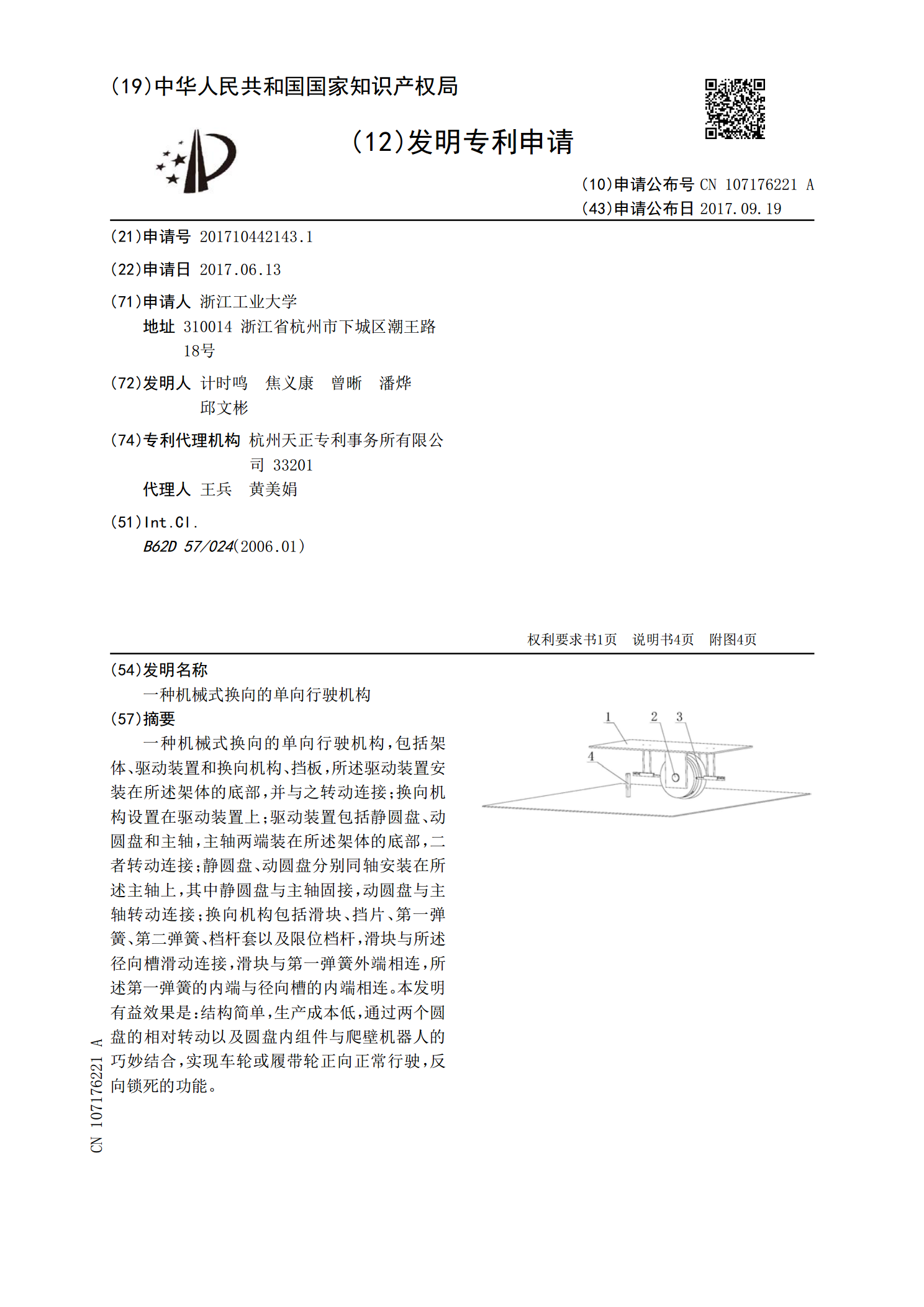
一种机械式换向的单向行驶机构,包括架体、驱动装置和换向机构、挡板,所述驱动装置安装在所述架体的底部,并与之转动连接;换向机构设置在驱动装置上;驱动装置包括静圆盘、动圆盘和主轴,主轴两端装在所述架体的底部,二者转动连接;静圆盘、动圆盘分别同轴安装在所述主轴上,其中静圆盘与主轴固接,动圆盘与主轴转动连接;换向机构包括滑块、挡片、第一弹簧、第二弹簧、档杆套以及限位档杆,滑块与所述径向槽滑动连接,滑块与第一弹簧外端相连,所述第一弹簧的内端与径向槽的内端相连。本发明有益效果是:结构简单,生产成本低,通过两个圆盘的相

机械式绞车自动换向排缆器机构.pdf
本发明提供的是一种机械式绞车自动换向排缆器机构。包括动力传递机构、换向锥齿轮组、导缆机构、换向触发机构;在绞车的转动轴上安装第一锥齿轮;动力传递机构由两根锥齿轮轴通过联轴器连接组成;换向锥齿轮组由安装在丝杠端部内外圈带齿的花键处的第二锥齿轮和第三锥齿轮组成;动力传递机构的一根锥齿轮轴的端部与第一锥齿轮啮合,另一根锥齿轮轴的端部位于第二锥齿轮和第三锥齿轮之间、与其中的一个锥齿轮啮合;导缆机构包括丝杠,通过螺母套在丝杠上的导缆架;换向触发机构包括两根穿过导缆架的拉杆,每根拉杆端部安装弹簧、限位块和齿条,两根齿