
一种大扭矩紧凑型机械臂关节.pdf

是秋****写意

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种大扭矩紧凑型机械臂关节.pdf
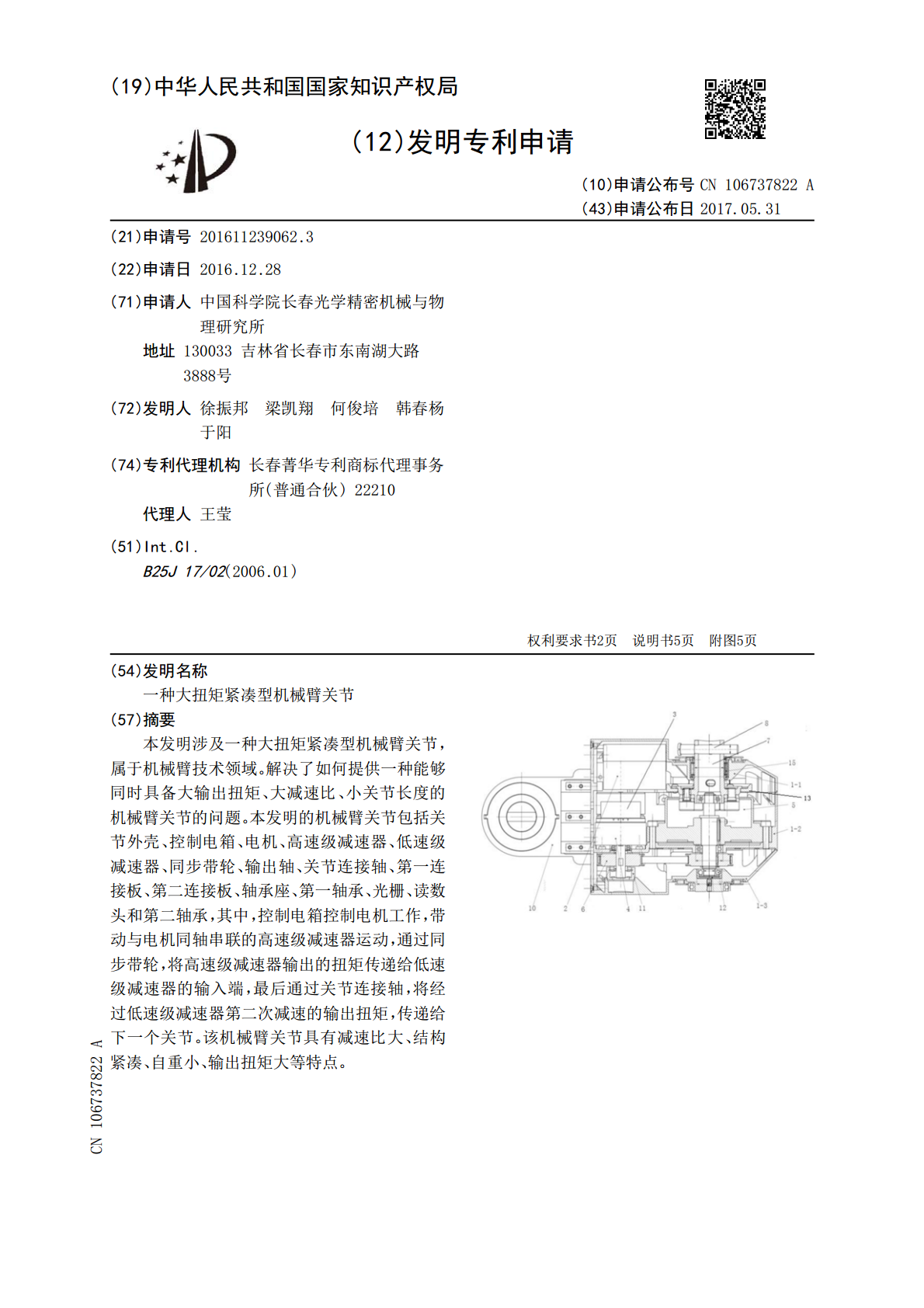
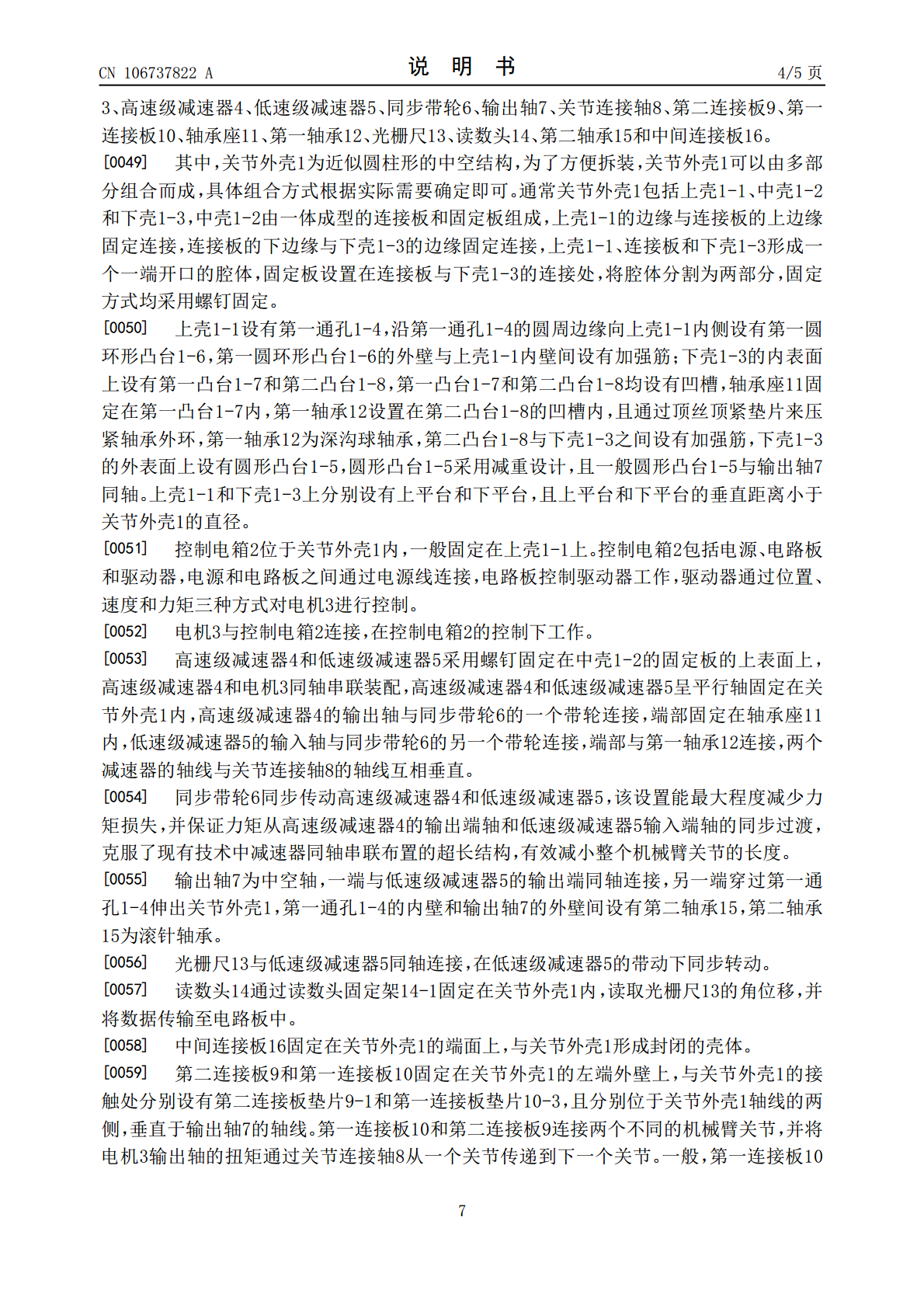
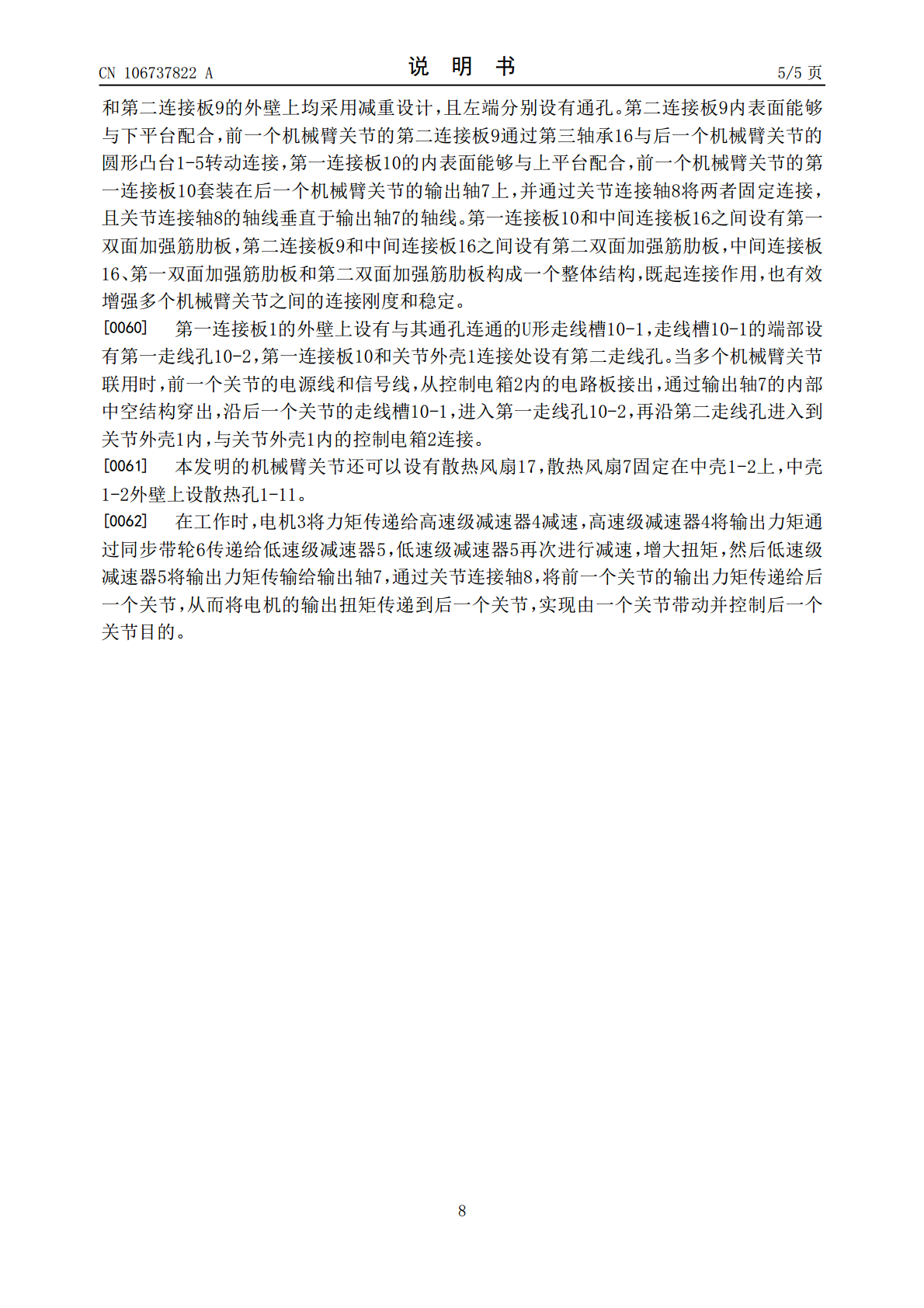
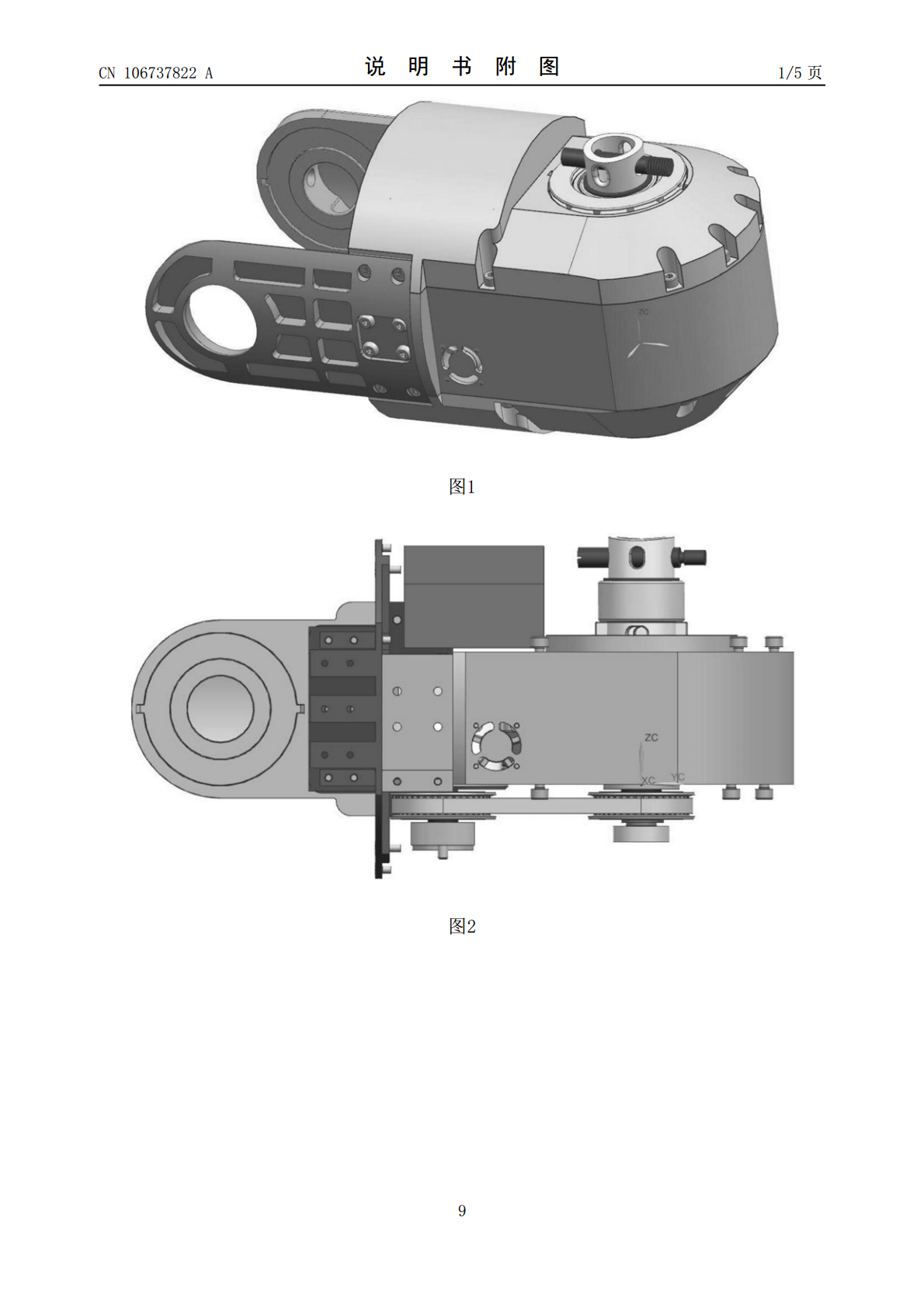
本发明涉及一种大扭矩紧凑型机械臂关节,属于机械臂技术领域。解决了如何提供一种能够同时具备大输出扭矩、大减速比、小关节长度的机械臂关节的问题。本发明的机械臂关节包括关节外壳、控制电箱、电机、高速级减速器、低速级减速器、同步带轮、输出轴、关节连接轴、第一连接板、第二连接板、轴承座、第一轴承、光栅、读数头和第二轴承,其中,控制电箱控制电机工作,带动与电机同轴串联的高速级减速器运动,通过同步带轮,将高速级减速器输出的扭矩传递给低速级减速器的输入端,最后通过关节连接轴,将经过低速级减速器第二次减速的输出扭矩,传递给
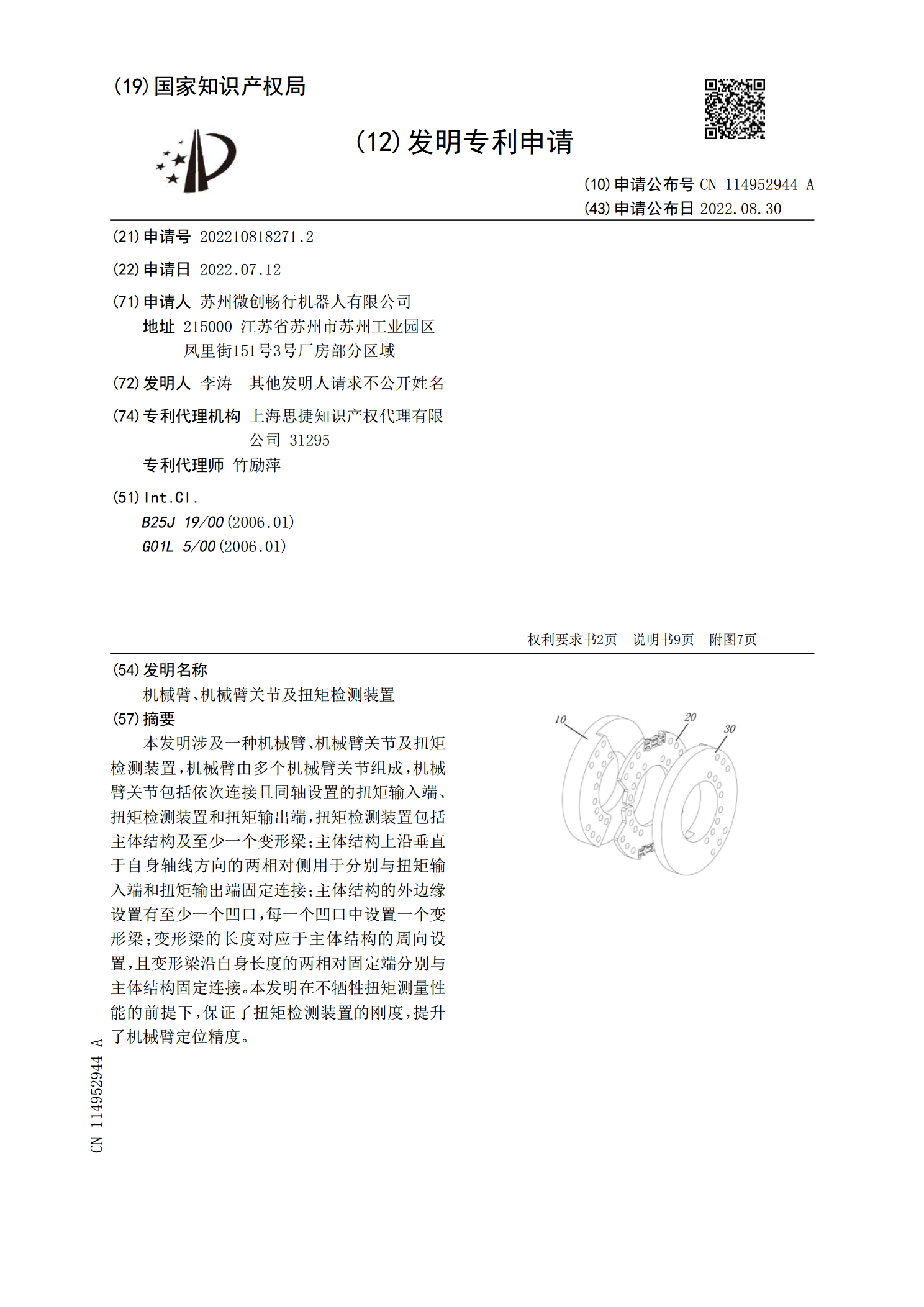
机械臂、机械臂关节及扭矩检测装置.pdf
本发明涉及一种机械臂、机械臂关节及扭矩检测装置,机械臂由多个机械臂关节组成,机械臂关节包括依次连接且同轴设置的扭矩输入端、扭矩检测装置和扭矩输出端,扭矩检测装置包括主体结构及至少一个变形梁;主体结构上沿垂直于自身轴线方向的两相对侧用于分别与扭矩输入端和扭矩输出端固定连接;主体结构的外边缘设置有至少一个凹口,每一个凹口中设置一个变形梁;变形梁的长度对应于主体结构的周向设置,且变形梁沿自身长度的两相对固定端分别与主体结构固定连接。本发明在不牺牲扭矩测量性能的前提下,保证了扭矩检测装置的刚度,提升了机械臂定位精
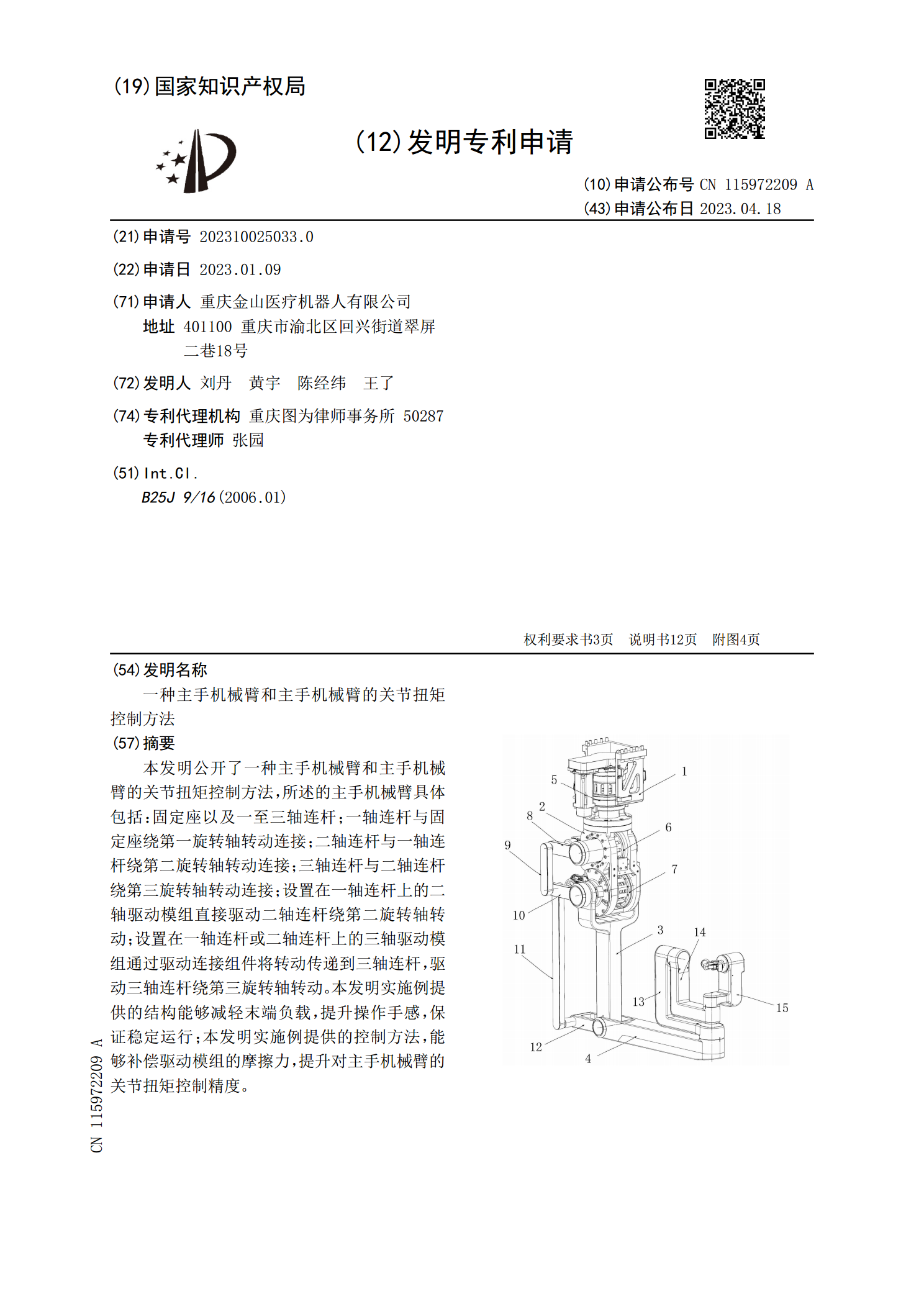
一种主手机械臂和主手机械臂的关节扭矩控制方法.pdf
本发明公开了一种主手机械臂和主手机械臂的关节扭矩控制方法,所述的主手机械臂具体包括:固定座以及一至三轴连杆;一轴连杆与固定座绕第一旋转轴转动连接;二轴连杆与一轴连杆绕第二旋转轴转动连接;三轴连杆与二轴连杆绕第三旋转轴转动连接;设置在一轴连杆上的二轴驱动模组直接驱动二轴连杆绕第二旋转轴转动;设置在一轴连杆或二轴连杆上的三轴驱动模组通过驱动连接组件将转动传递到三轴连杆,驱动三轴连杆绕第三旋转轴转动。本发明实施例提供的结构能够减轻末端负载,提升操作手感,保证稳定运行;本发明实施例提供的控制方法,能够补偿驱动模组

一种用于机械臂俯仰及回转的紧凑型复合关节.pdf
一种用于机械臂俯仰及回转的紧凑型复合关节,它涉及机械手臂领域。本发明解决了现有的机械手臂的各关节自由度都是相对独立的,存在结构拖沓、臃肿,导致空间利用率低,故障率高,且电机回转时容易出现关节处电线磨损,甚至损坏的问题。本发明的肩部俯仰主动齿轮安装在肩部俯仰电机输出轴上,第二谐波减速器安装在肩部仰俯座上,肩部俯仰从动齿轮安装在第二谐波减速器动力输入端,肩部俯仰从动齿轮与肩部俯仰主动齿轮相啮合,肩部回转主动齿轮安装在肩部回转电机输出轴上,第一谐波减速器安装在肩部底座上,肩部回转从动齿轮安装在第一谐波减速器动力
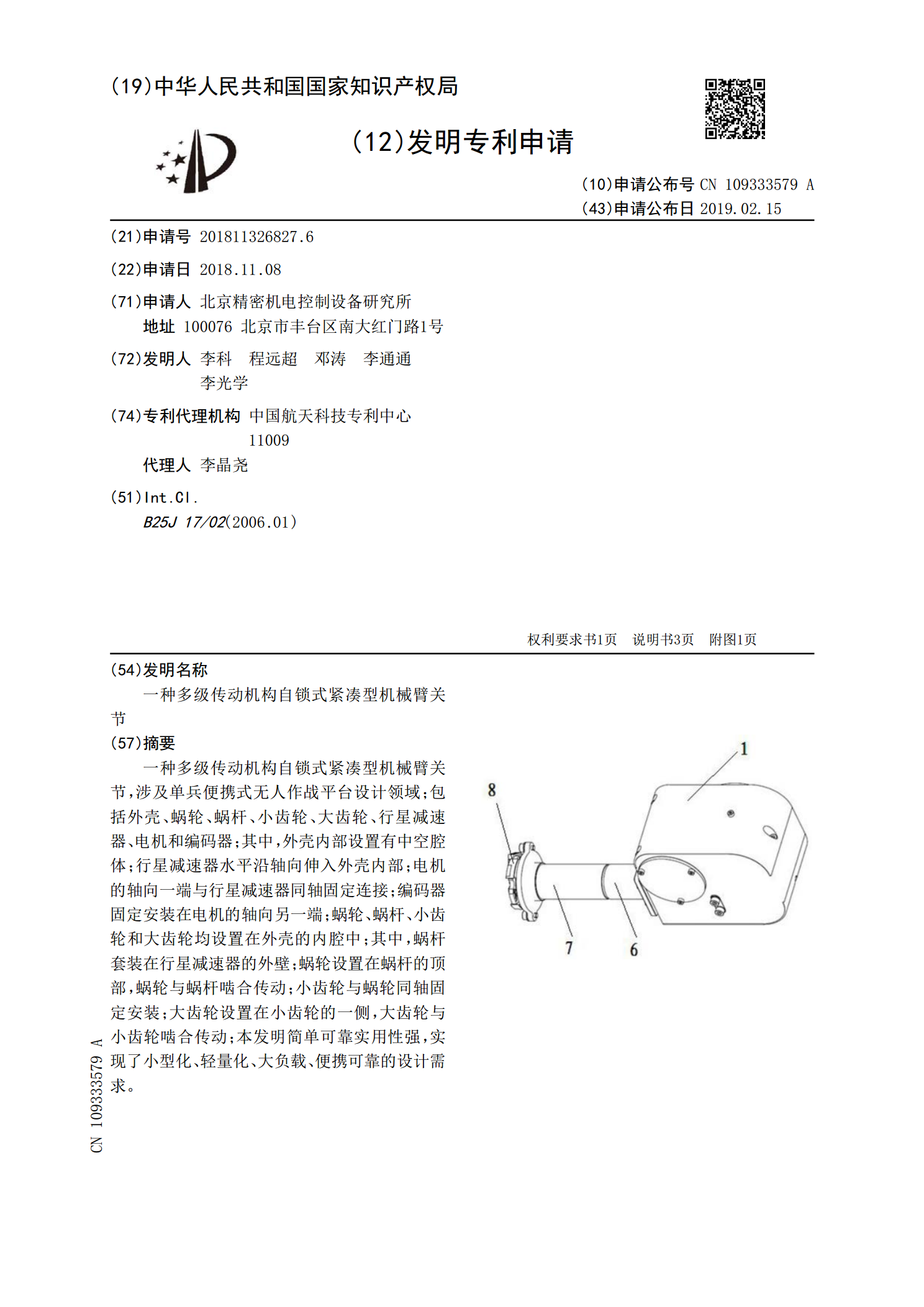
一种多级传动机构自锁式紧凑型机械臂关节.pdf
一种多级传动机构自锁式紧凑型机械臂关节,涉及单兵便携式无人作战平台设计领域;包括外壳、蜗轮、蜗杆、小齿轮、大齿轮、行星减速器、电机和编码器;其中,外壳内部设置有中空腔体;行星减速器水平沿轴向伸入外壳内部;电机的轴向一端与行星减速器同轴固定连接;编码器固定安装在电机的轴向另一端;蜗轮、蜗杆、小齿轮和大齿轮均设置在外壳的内腔中;其中,蜗杆套装在行星减速器的外壁;蜗轮设置在蜗杆的顶部,蜗轮与蜗杆啮合传动;小齿轮与蜗轮同轴固定安装;大齿轮设置在小齿轮的一侧,大齿轮与小齿轮啮合传动;本发明简单可靠实用性强,实现了小