
一种新型机器人用减速机.pdf

静芙****可爱


1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型机器人用减速机.pdf
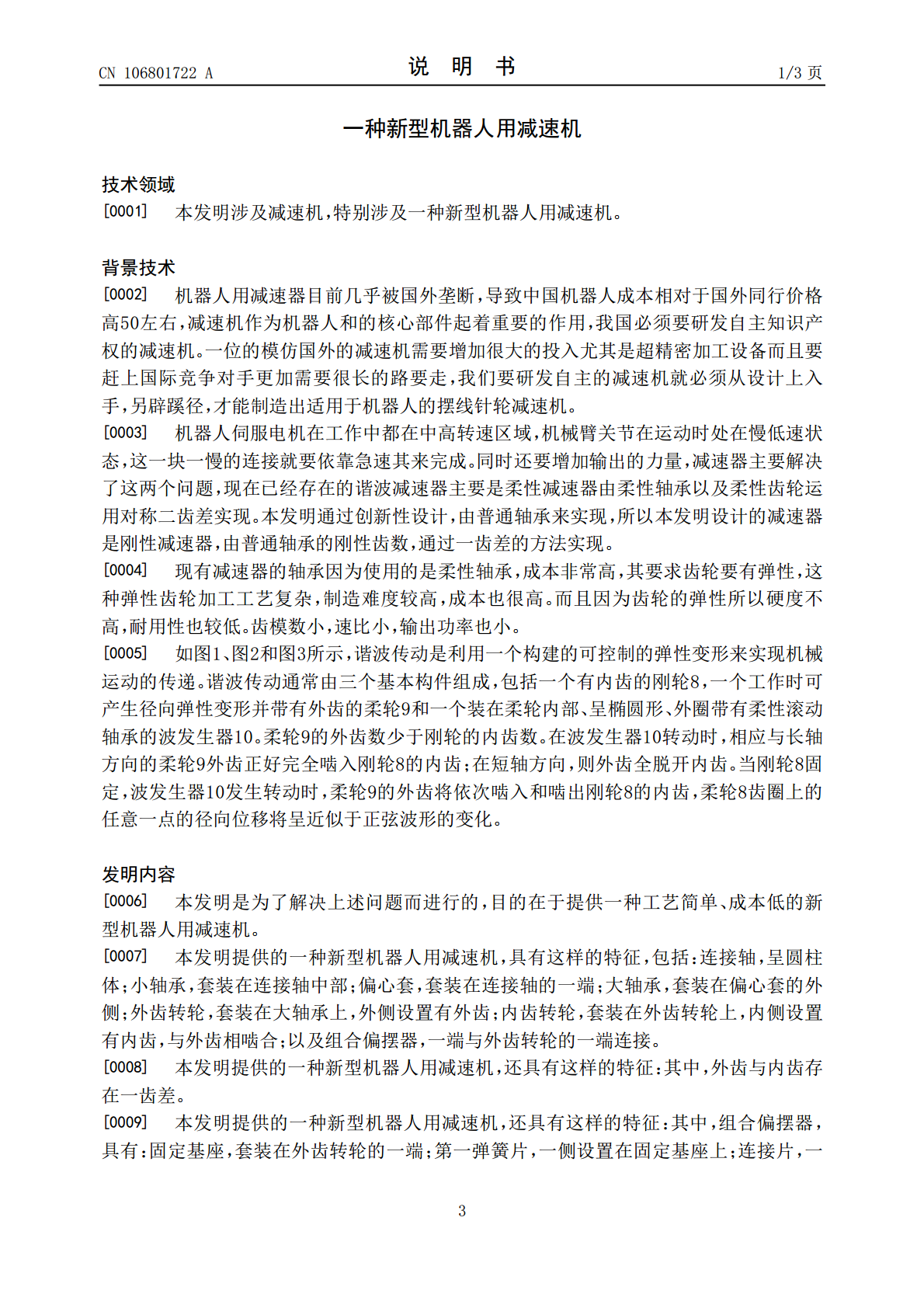
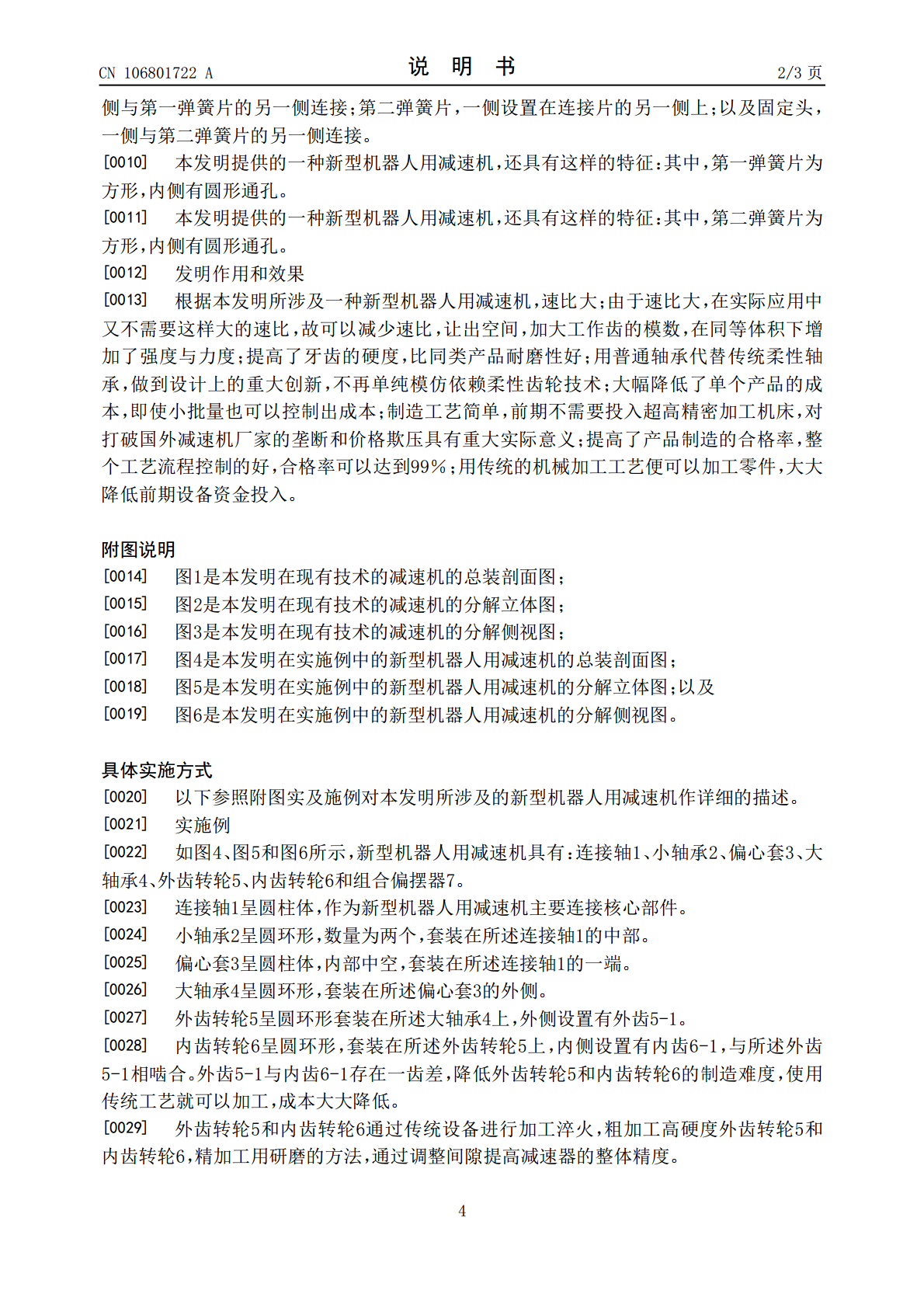
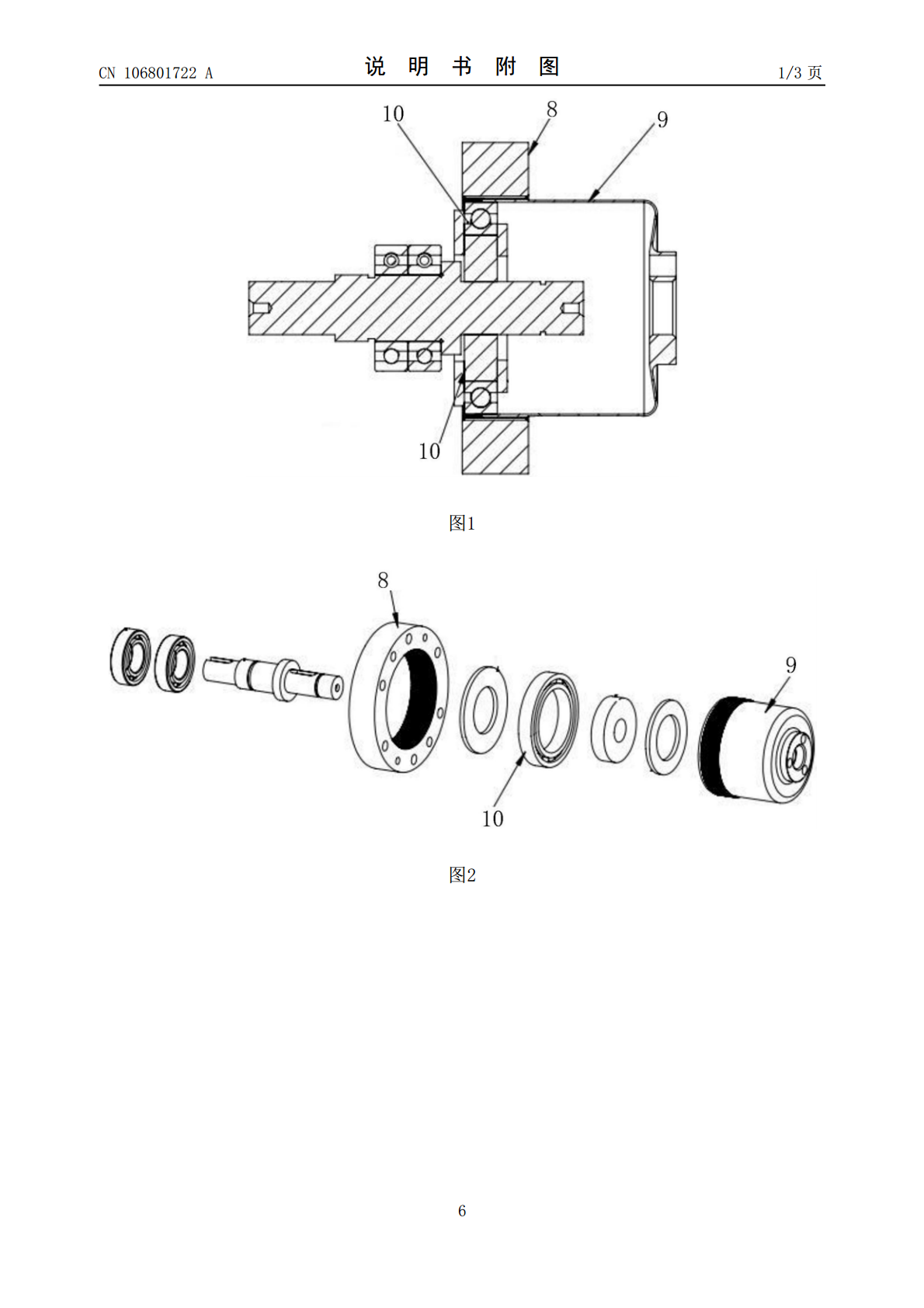
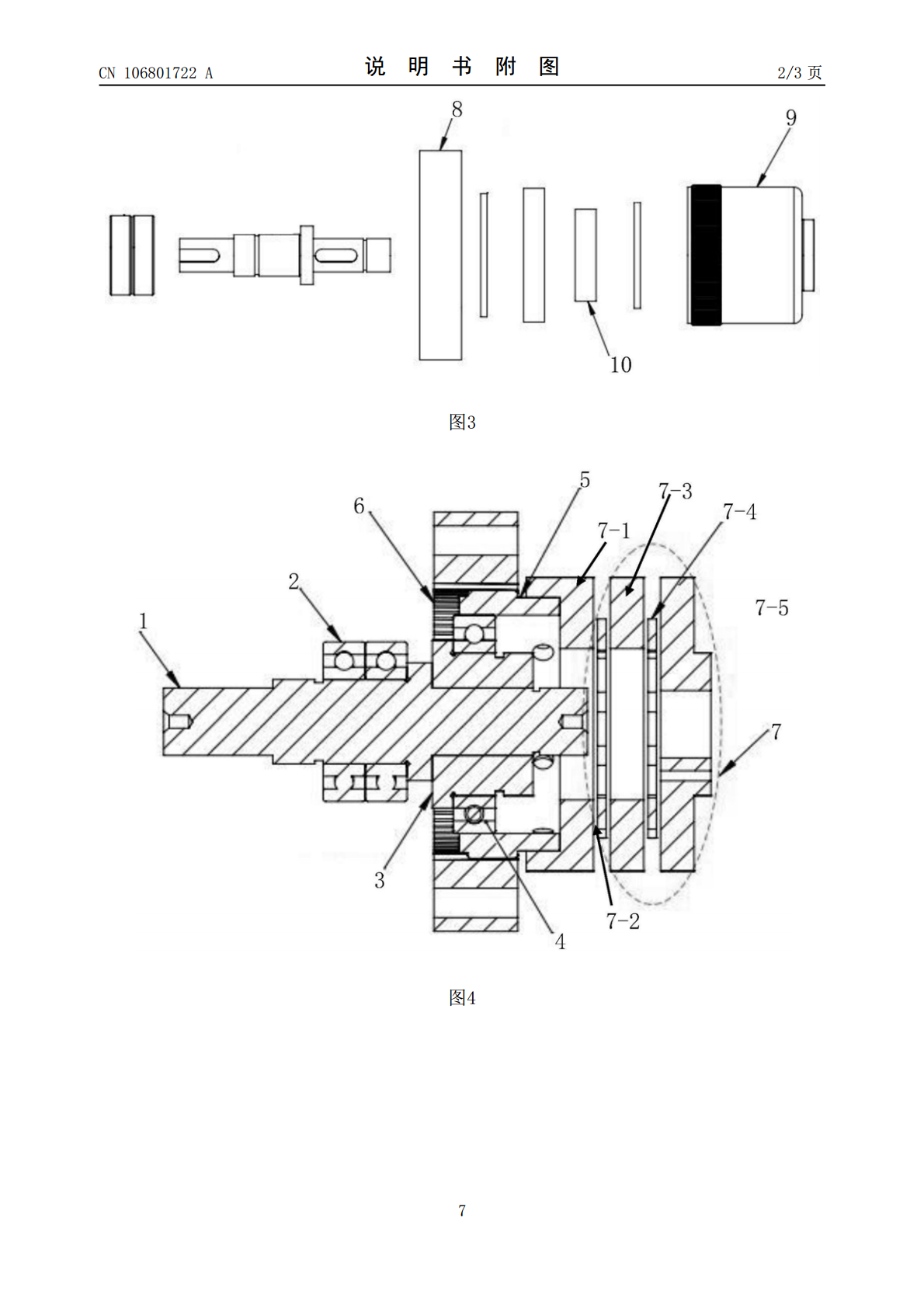
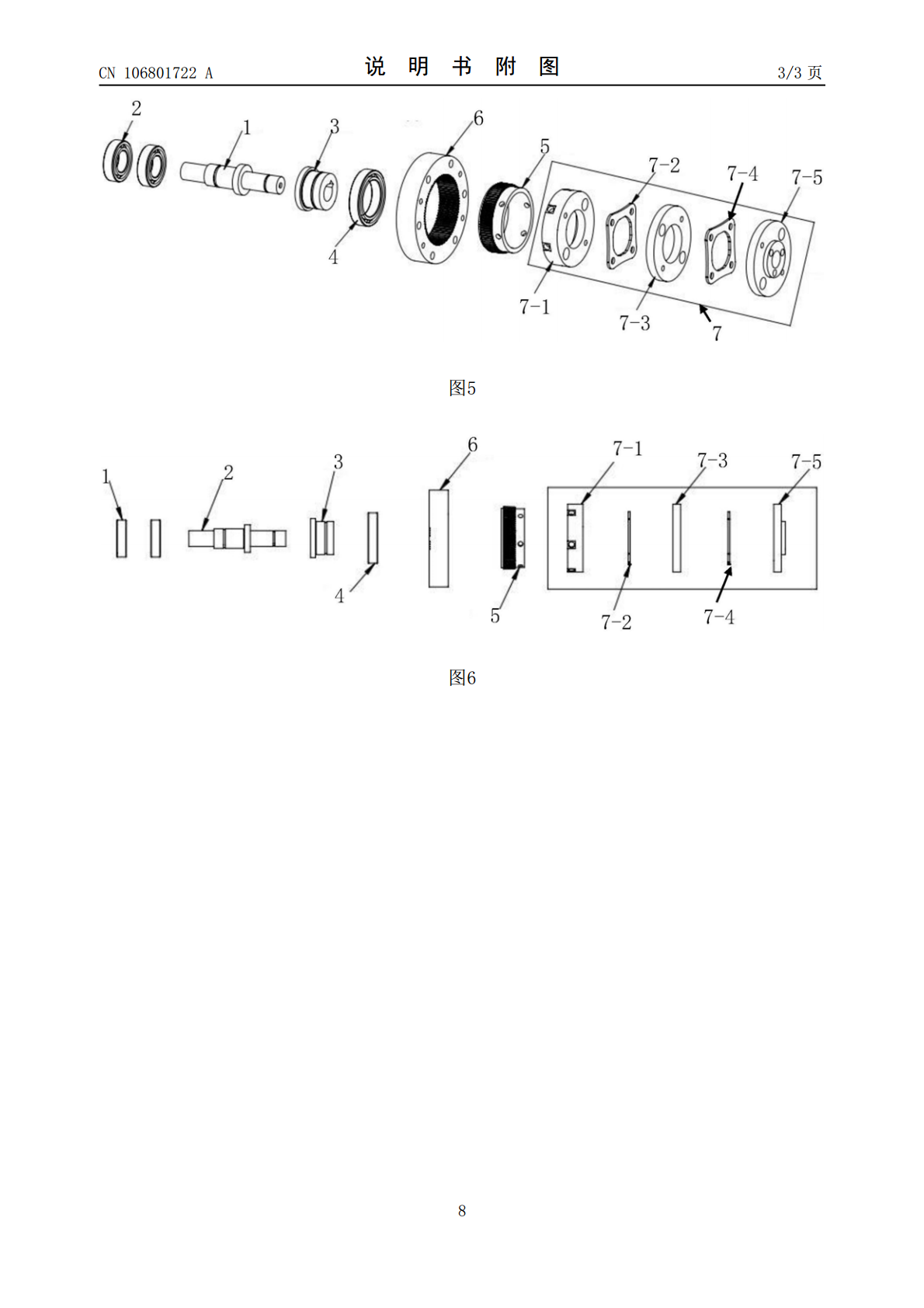
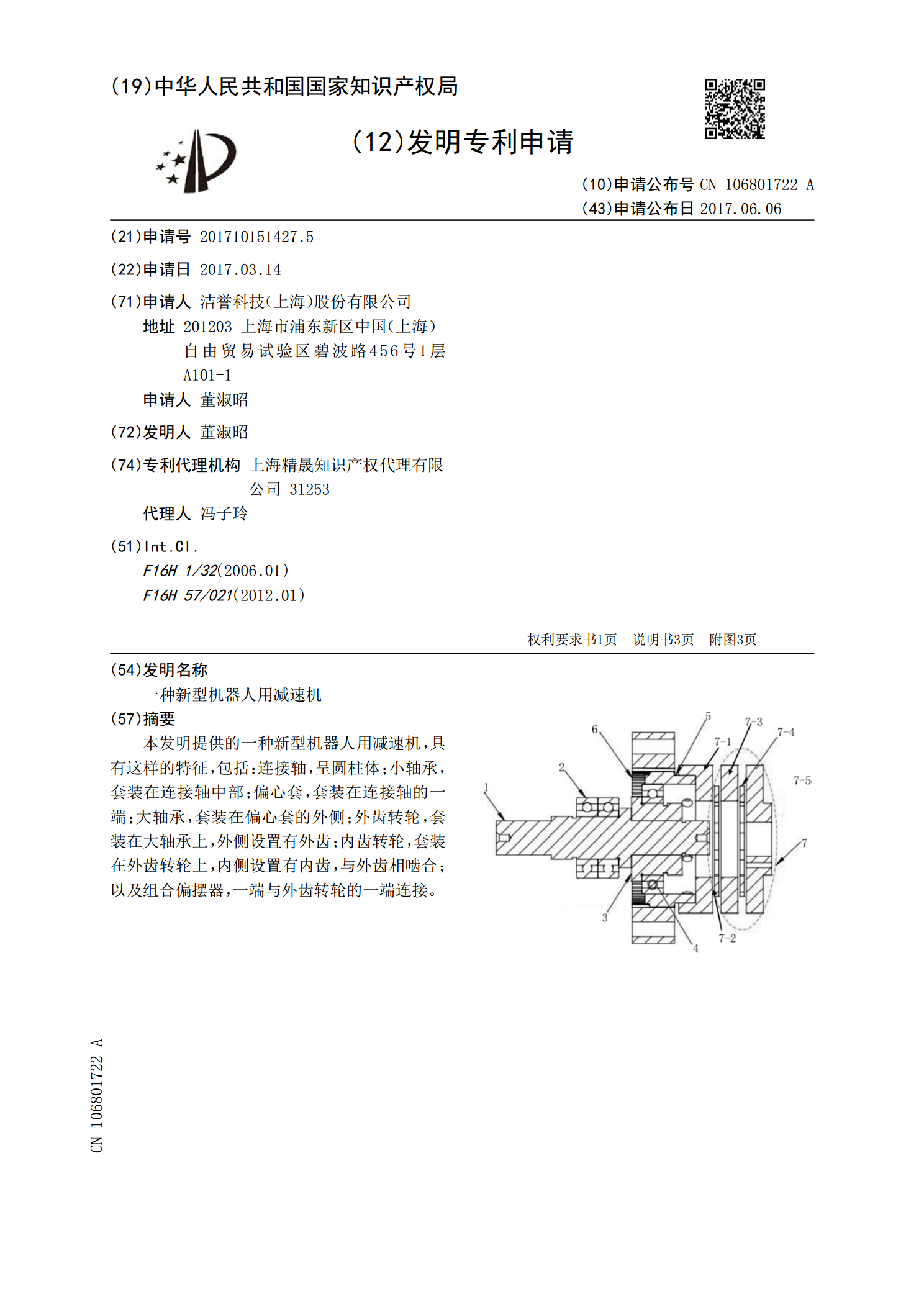
本发明提供的一种新型机器人用减速机,具有这样的特征,包括:连接轴,呈圆柱体;小轴承,套装在连接轴中部;偏心套,套装在连接轴的一端;大轴承,套装在偏心套的外侧;外齿转轮,套装在大轴承上,外侧设置有外齿;内齿转轮,套装在外齿转轮上,内侧设置有内齿,与外齿相啮合;以及组合偏摆器,一端与外齿转轮的一端连接。
一种新型制造工艺的机器人用RV减速机.pdf
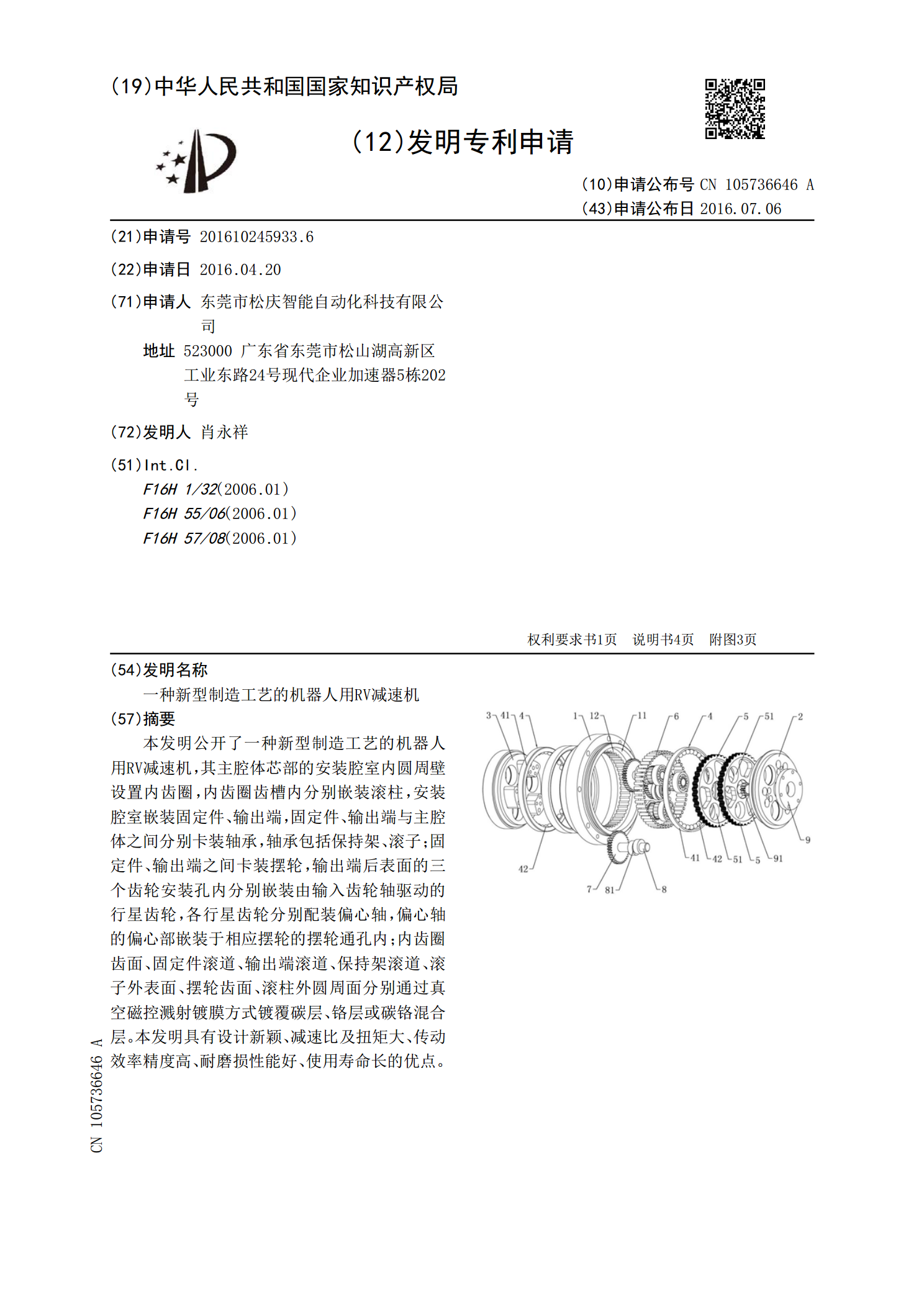
本发明公开了一种新型制造工艺的机器人用RV减速机,其主腔体芯部的安装腔室内圆周壁设置内齿圈,内齿圈齿槽内分别嵌装滚柱,安装腔室嵌装固定件、输出端,固定件、输出端与主腔体之间分别卡装轴承,轴承包括保持架、滚子;固定件、输出端之间卡装摆轮,输出端后表面的三个齿轮安装孔内分别嵌装由输入齿轮轴驱动的行星齿轮,各行星齿轮分别配装偏心轴,偏心轴的偏心部嵌装于相应摆轮的摆轮通孔内;内齿圈齿面、固定件滚道、输出端滚道、保持架滚道、滚子外表面、摆轮齿面、滚柱外圆周面分别通过真空磁控溅射镀膜方式镀覆碳层、铬层或碳铬混合层。本
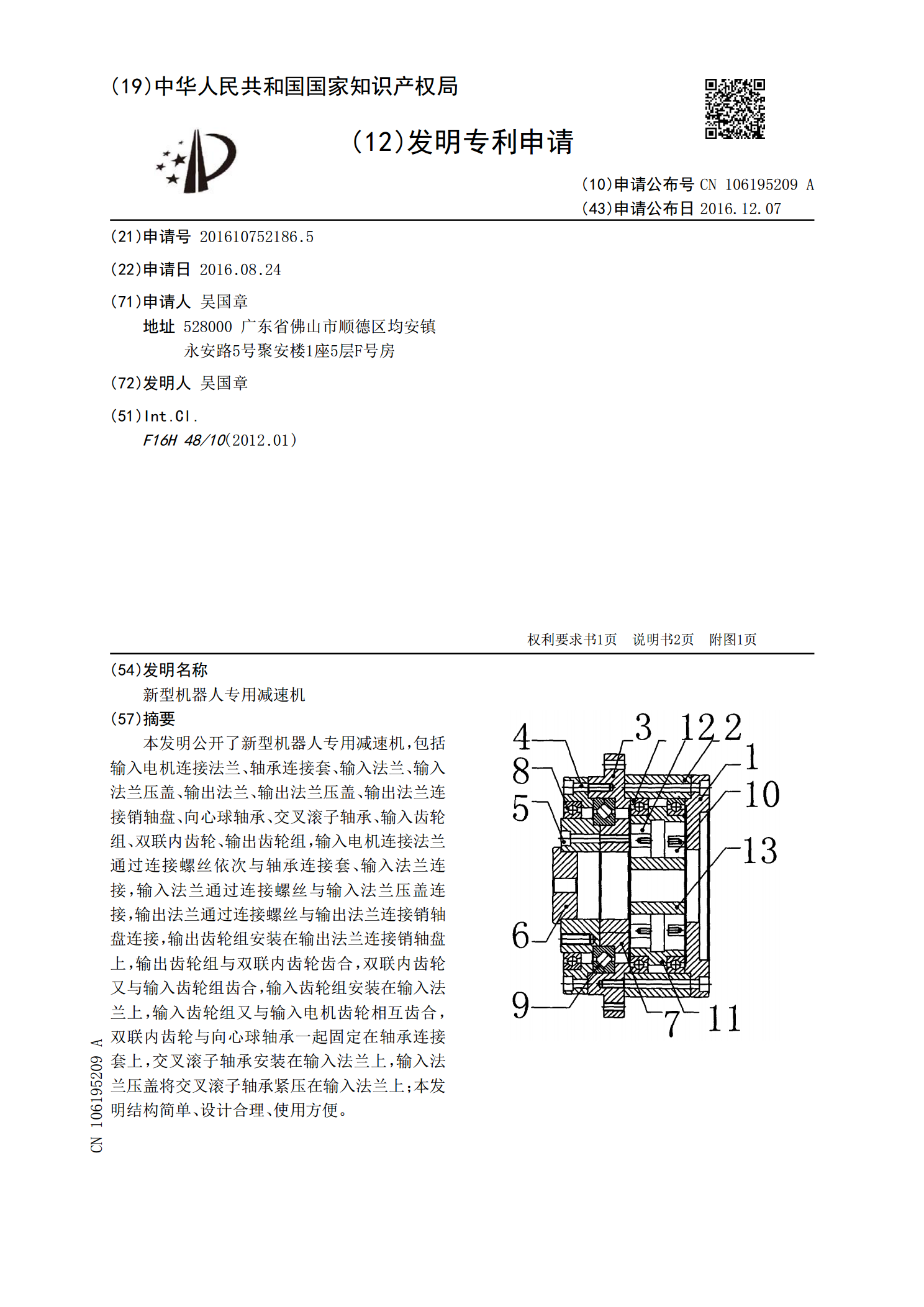
新型机器人专用减速机.pdf
本发明公开了新型机器人专用减速机,包括输入电机连接法兰、轴承连接套、输入法兰、输入法兰压盖、输出法兰、输出法兰压盖、输出法兰连接销轴盘、向心球轴承、交叉滚子轴承、输入齿轮组、双联内齿轮、输出齿轮组,输入电机连接法兰通过连接螺丝依次与轴承连接套、输入法兰连接,输入法兰通过连接螺丝与输入法兰压盖连接,输出法兰通过连接螺丝与输出法兰连接销轴盘连接,输出齿轮组安装在输出法兰连接销轴盘上,输出齿轮组与双联内齿轮齿合,双联内齿轮又与输入齿轮组齿合,输入齿轮组安装在输入法兰上,输入齿轮组又与输入电机齿轮相互齿合,双联内
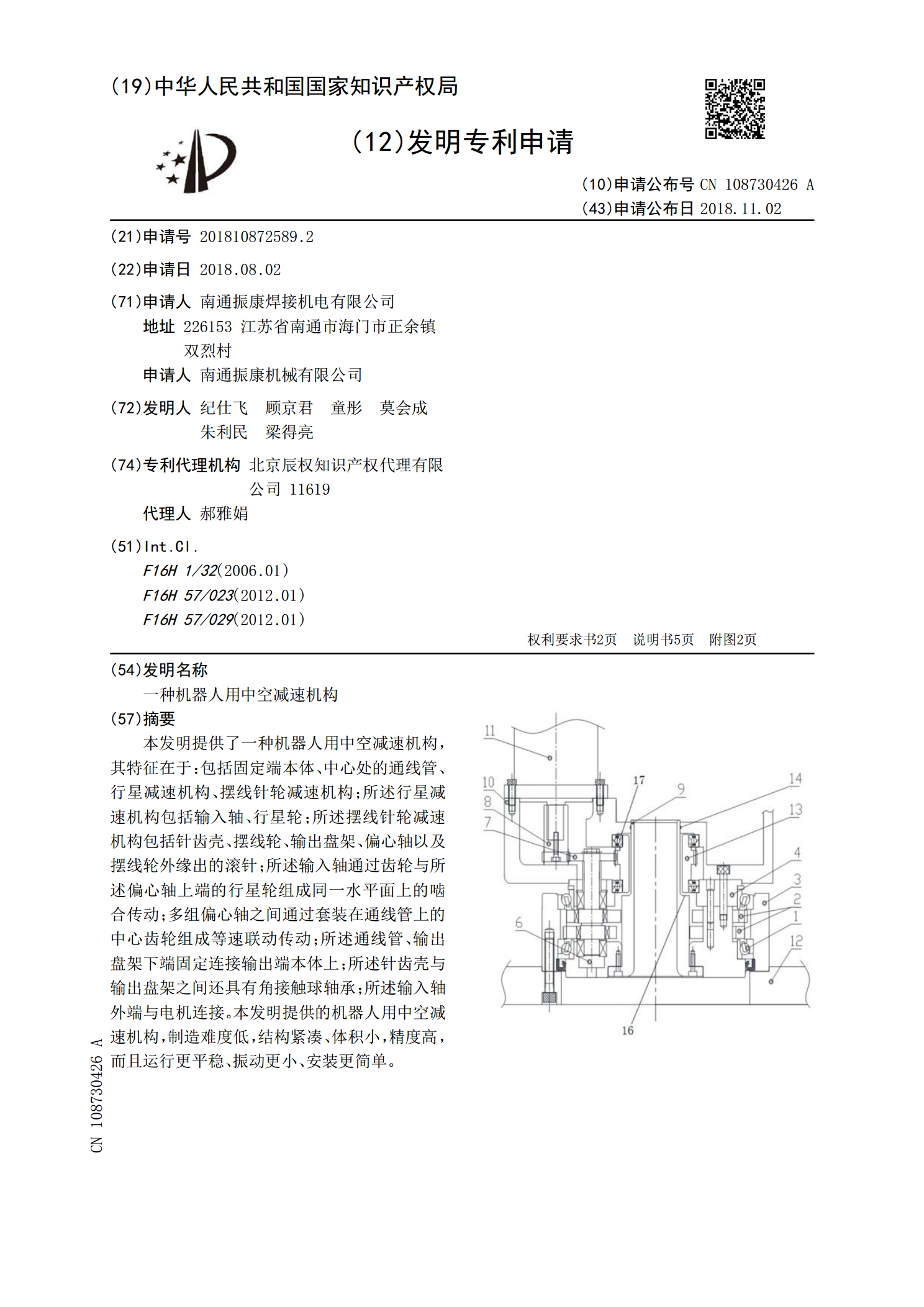
一种机器人用中空减速机构.pdf
本发明提供了一种机器人用中空减速机构,其特征在于:包括固定端本体、中心处的通线管、行星减速机构、摆线针轮减速机构;所述行星减速机构包括输入轴、行星轮;所述摆线针轮减速机构包括针齿壳、摆线轮、输出盘架、偏心轴以及摆线轮外缘出的滚针;所述输入轴通过齿轮与所述偏心轴上端的行星轮组成同一水平面上的啮合传动;多组偏心轴之间通过套装在通线管上的中心齿轮组成等速联动传动;所述通线管、输出盘架下端固定连接输出端本体上;所述针齿壳与输出盘架之间还具有角接触球轴承;所述输入轴外端与电机连接。本发明提供的机器人用中空减速机构,
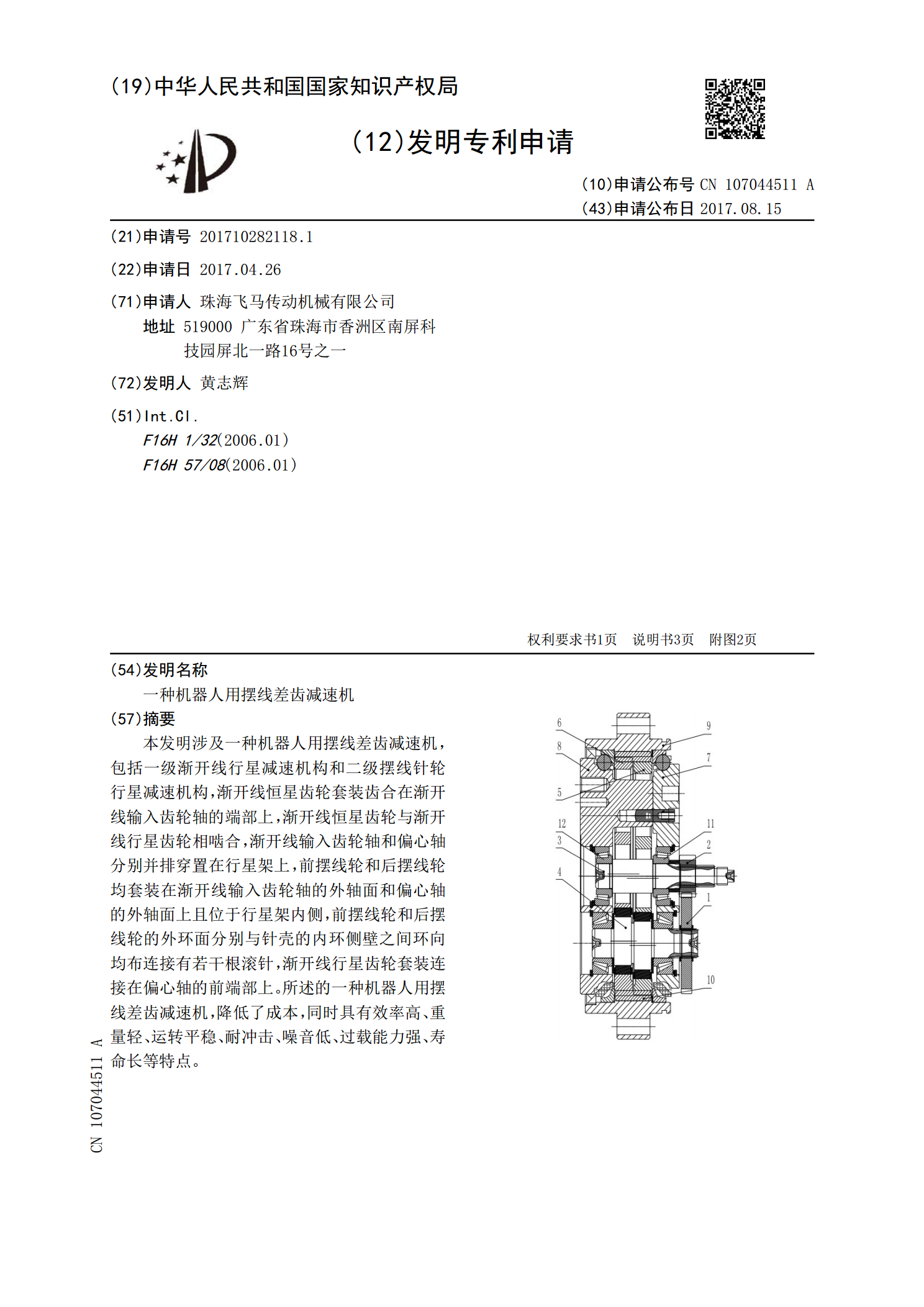
一种机器人用摆线差齿减速机.pdf
本发明涉及一种机器人用摆线差齿减速机,包括一级渐开线行星减速机构和二级摆线针轮行星减速机构,渐开线恒星齿轮套装齿合在渐开线输入齿轮轴的端部上,渐开线恒星齿轮与渐开线行星齿轮相啮合,渐开线输入齿轮轴和偏心轴分别并排穿置在行星架上,前摆线轮和后摆线轮均套装在渐开线输入齿轮轴的外轴面和偏心轴的外轴面上且位于行星架内侧,前摆线轮和后摆线轮的外环面分别与针壳的内环侧壁之间环向均布连接有若干根滚针,渐开线行星齿轮套装连接在偏心轴的前端部上。所述的一种机器人用摆线差齿减速机,降低了成本,同时具有效率高、重量轻、运转平稳