
一种拟人锤击装置.pdf

是来****文章

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种拟人锤击装置.pdf
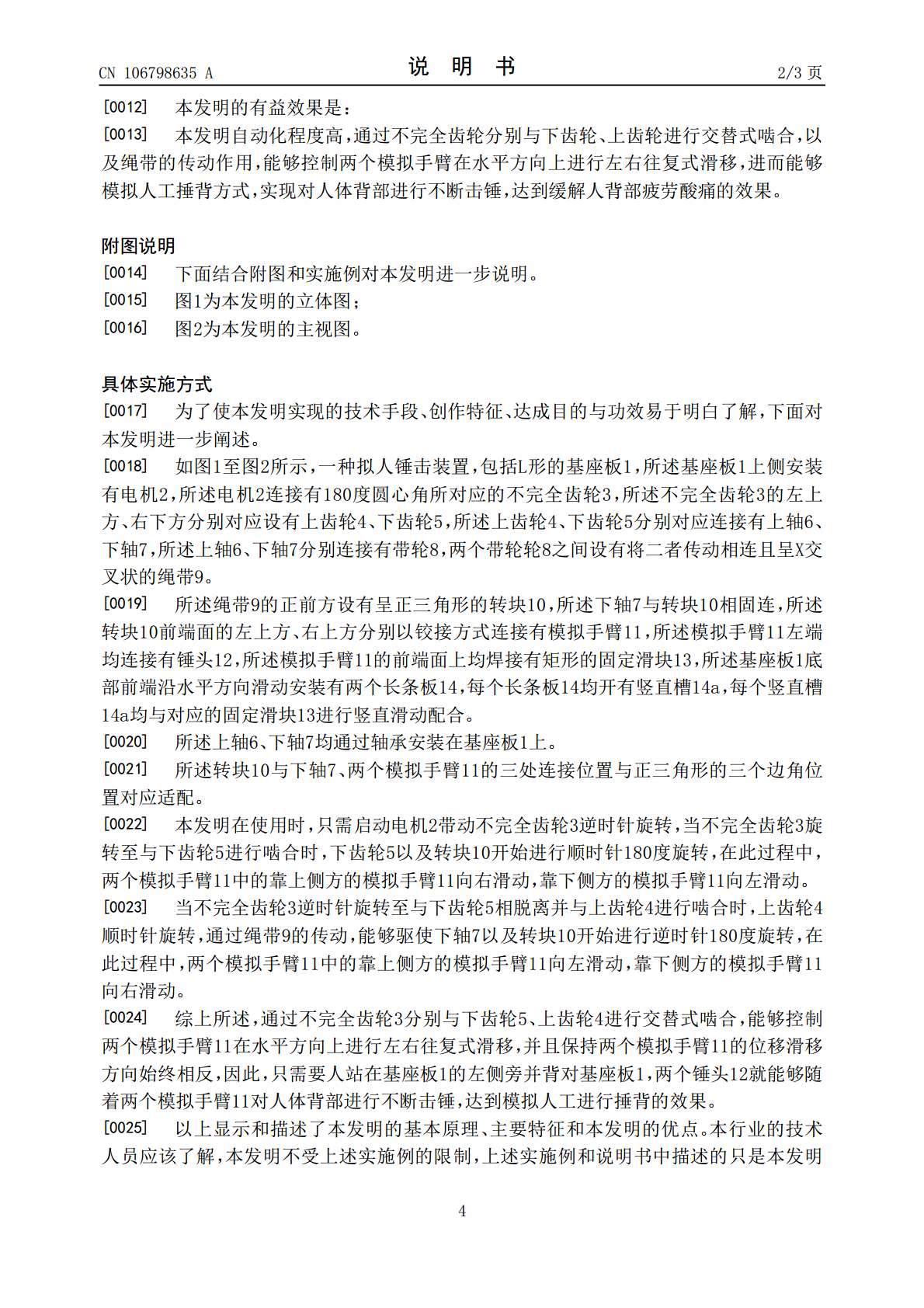
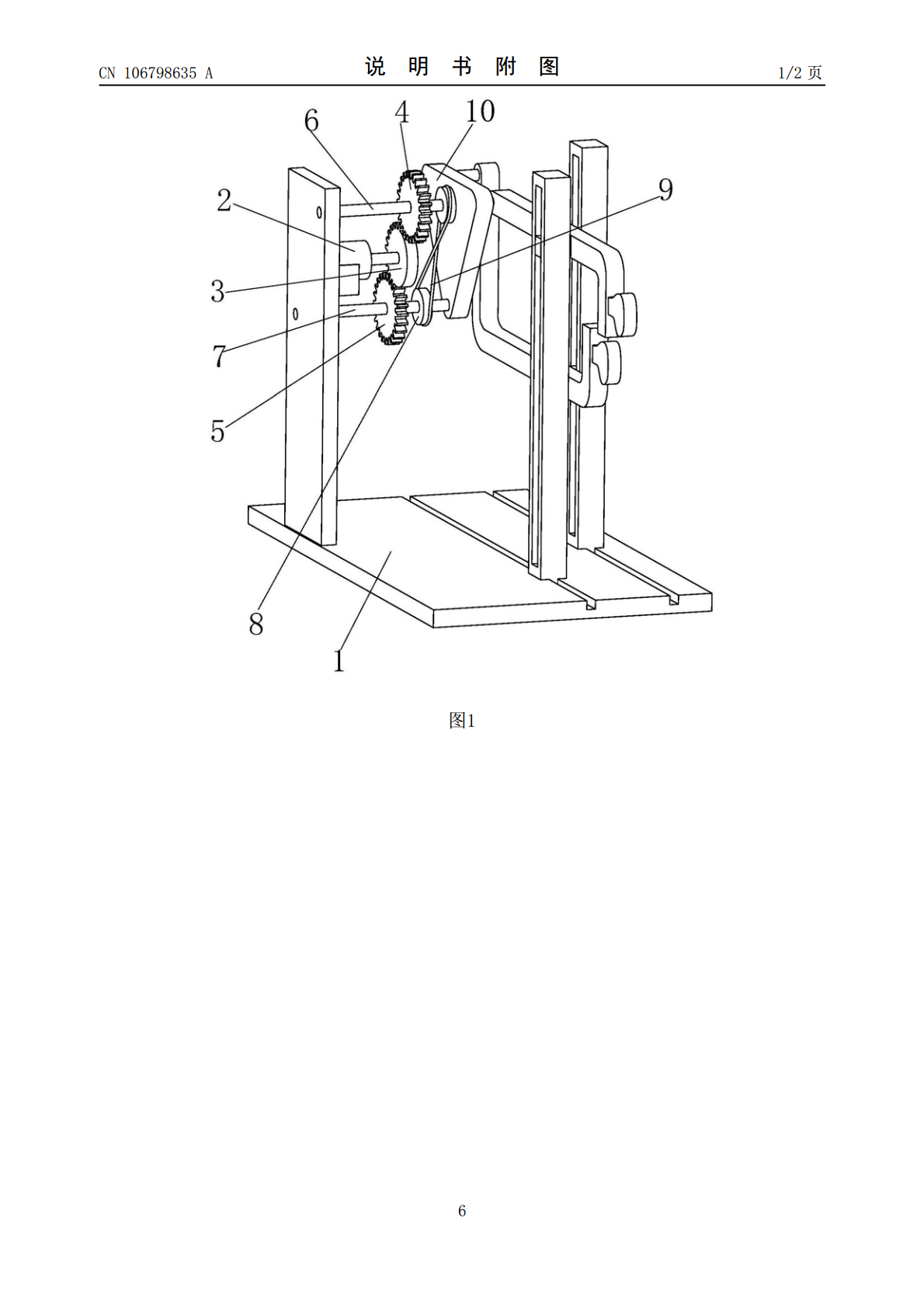
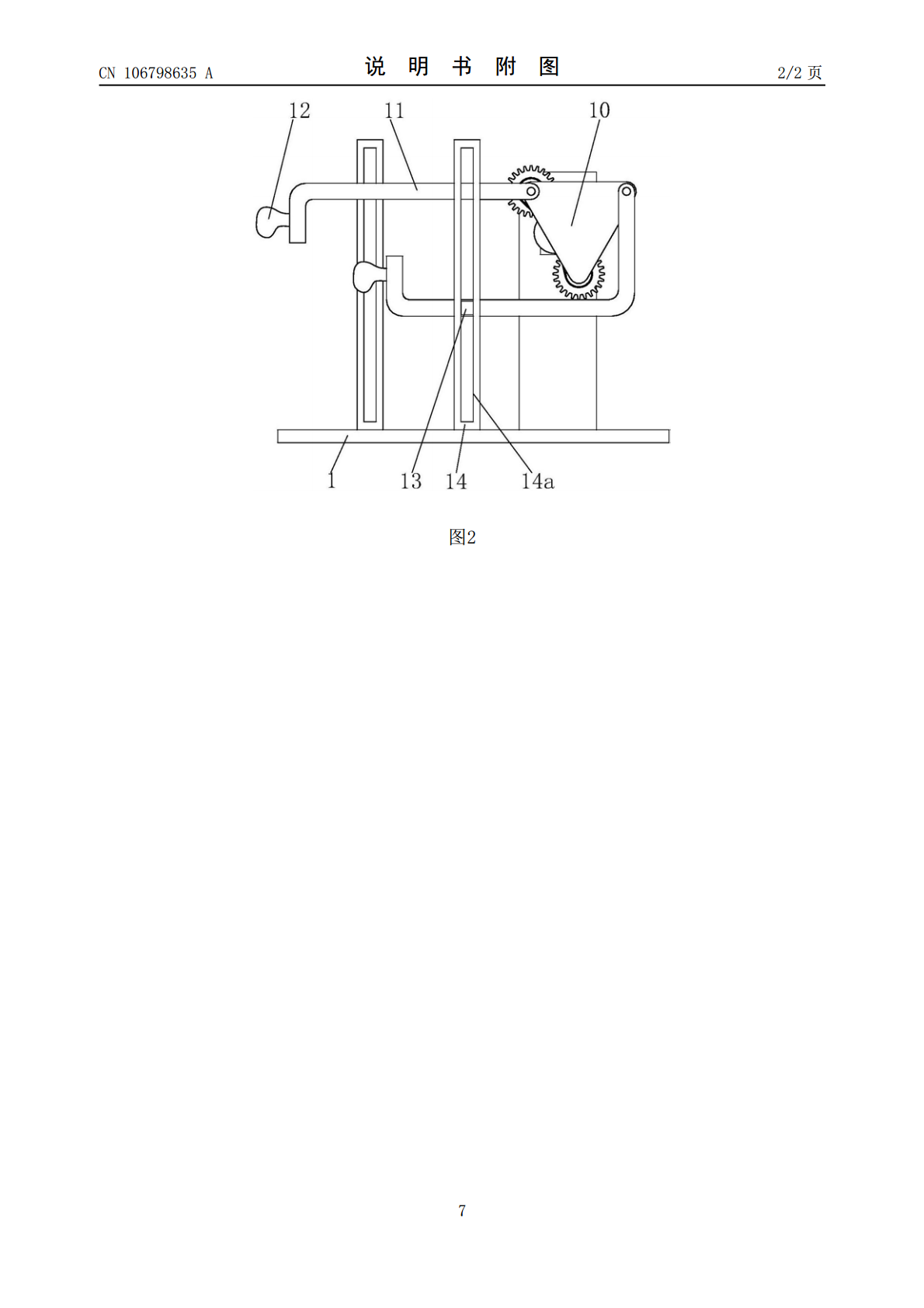
本发明涉及一种拟人锤击装置,包括L形的基座板,基座板上侧安装有电机,电机连接有180度圆心角所对应的不完全齿轮,不完全齿轮的左上方、右下方分别对应设有上齿轮、下齿轮,上齿轮、下齿轮分别对应连接有上轴、下轴,上轴、下轴分别连接有带轮,两个带轮之间设有将二者传动相连且呈X交叉状的绳带。本发明自动化程度高,通过不完全齿轮分别与下齿轮、上齿轮进行交替式啮合,以及绳带的传动作用,能够控制两个模拟手臂在水平方向上进行左右往复式滑移,进而能够模拟人工捶背方式,实现对人体背部进行不断击锤,达到缓解人背部疲劳酸痛的效果。

一种管箍锤击装置.pdf
本发明公开了一种管箍锤击装置,包括框架、拨叉、驱动机构和锤击机构,所述框架为一框型结构,所述驱动机构通过滑道副安装在框架内、并可沿滑道左右移动,两个锤击机构与驱动机构呈“品”字形安装在框架内侧壁上,两个锤击机构相对安装;所述拨叉设有拨叉轴,拨叉轴的下端设有销轴,该销轴与拨叉轴铰接,拨叉轴的上端设有滑板,该滑板一端与拨叉轴铰接,另一端设有滑道;所述拨叉通过销轴与驱动机构活动连接,通过滑道与锤击机构活动连接,驱动机构通过拨叉驱动锤击机构交替对夹在两锤击机构之间的管体进行锤击。本发明结构简单,用于对锈蚀管箍的拆
一种机械锤击平整装置.pdf
本发明涉及一种机械锤击平整装置,安装于数控机床或机器人上,其特征在于,包括机架及设在机架上的压电陶瓷促动器、支撑架、电机、锤击头和气枪,其中,支撑架依预设轨迹滑动设置于机架上,压电陶瓷促动器的内轴与支撑架固定连接,电机固设于支撑架上,且电机输出轴与锤击头传动相连,气枪设于电机输出轴的侧部,与外接动力源相连,且气枪的出气口对准锤击头在工件上的着力点。本发明用于平面或自由曲面工件的加工处理,不仅加工效率高,而且还能提高工件的表面硬度。
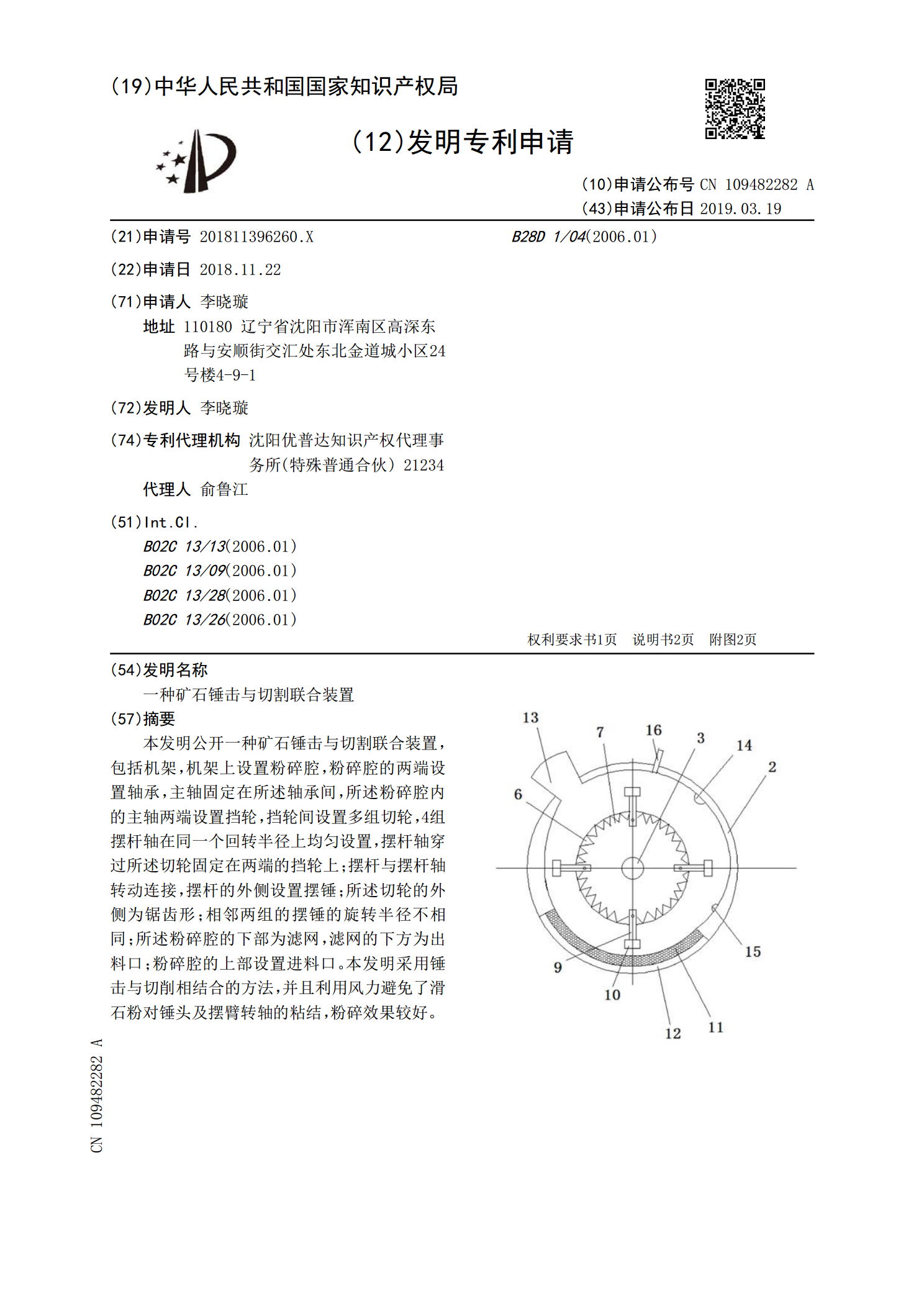
一种矿石锤击与切割联合装置.pdf
本发明公开一种矿石锤击与切割联合装置,包括机架,机架上设置粉碎腔,粉碎腔的两端设置轴承,主轴固定在所述轴承间,所述粉碎腔内的主轴两端设置挡轮,挡轮间设置多组切轮,4组摆杆轴在同一个回转半径上均匀设置,摆杆轴穿过所述切轮固定在两端的挡轮上;摆杆与摆杆轴转动连接,摆杆的外侧设置摆锤;所述切轮的外侧为锯齿形;相邻两组的摆锤的旋转半径不相同;所述粉碎腔的下部为滤网,滤网的下方为出料口;粉碎腔的上部设置进料口。本发明采用锤击与切削相结合的方法,并且利用风力避免了滑石粉对锤头及摆臂转轴的粘结,粉碎效果较好。
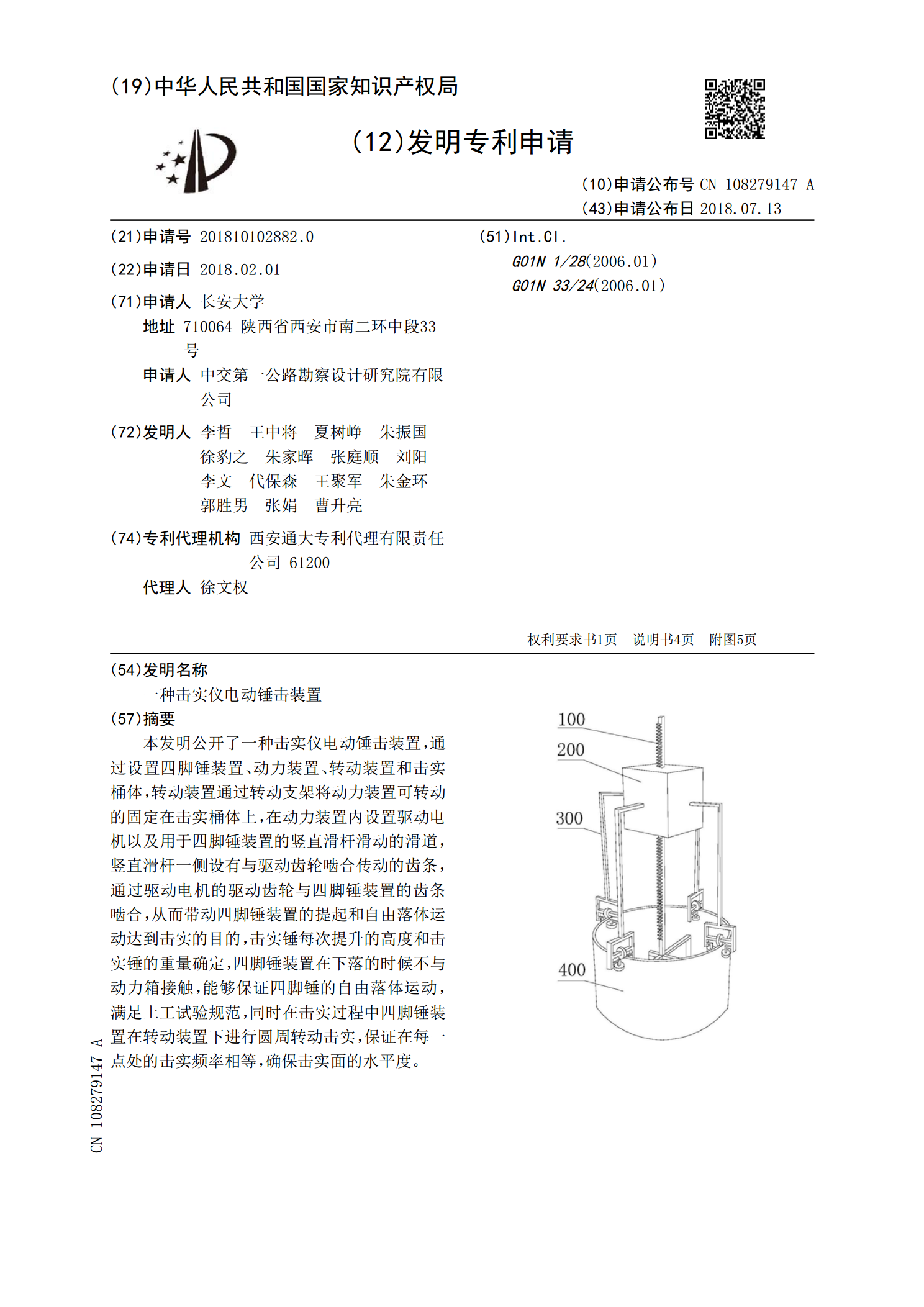
一种击实仪电动锤击装置.pdf
本发明公开了一种击实仪电动锤击装置,通过设置四脚锤装置、动力装置、转动装置和击实桶体,转动装置通过转动支架将动力装置可转动的固定在击实桶体上,在动力装置内设置驱动电机以及用于四脚锤装置的竖直滑杆滑动的滑道,竖直滑杆一侧设有与驱动齿轮啮合传动的齿条,通过驱动电机的驱动齿轮与四脚锤装置的齿条啮合,从而带动四脚锤装置的提起和自由落体运动达到击实的目的,击实锤每次提升的高度和击实锤的重量确定,四脚锤装置在下落的时候不与动力箱接触,能够保证四脚锤的自由落体运动,满足土工试验规范,同时在击实过程中四脚锤装置在转动装置