
一种多工位自动换刀一体化打磨主轴机构.pdf

一只****ua


1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多工位自动换刀一体化打磨主轴机构.pdf
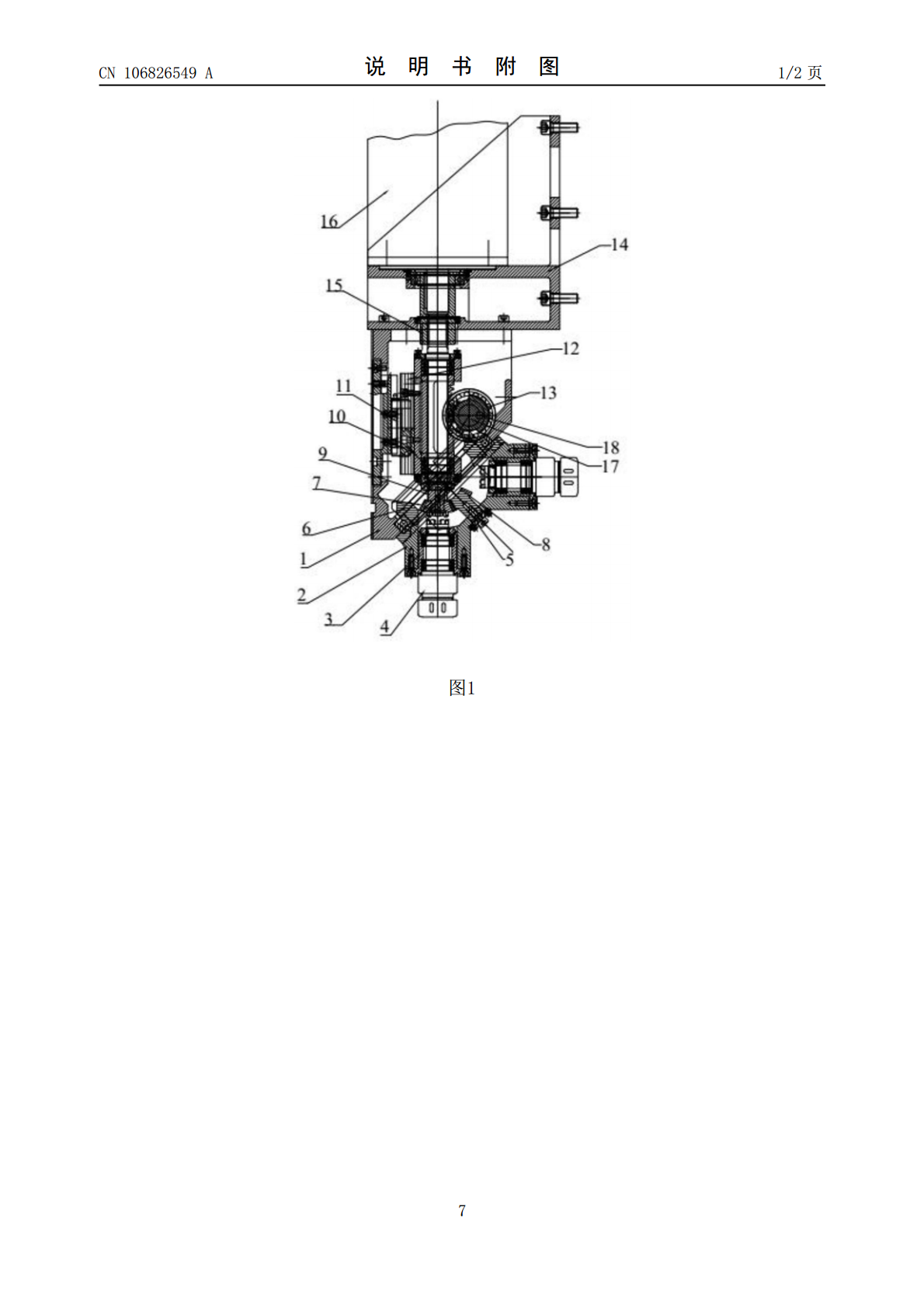
本发明提供一种多工位自动换刀一体化打磨主轴机构,包括主轴箱体,所述主轴箱体中心内部设有主传动轴,所述主传动轴顶部电线连接主轴电机,所述主轴电机与所述主轴箱体之间设有主轴支架,位于所述主轴支架部分的所述轴传动轴外侧设有连轴套,所述主传动轴侧面连接线轨滑座,所述线轨滑座滑动连接固设于所述主轴箱体内部的线轨,所述主传动轴底部连接有换刀机构,所述换刀机构底部设有铣夹头,所述铣夹头外侧设有刀套,所述换刀机构包括主轴刀体、刀体轴、第一齿轮、第二齿轮和第三齿轮,所述第三齿轮内部设有传动轴和凸键。本发明节省了换刀时间,可

四头自动换刀主轴机构及多头自动换刀主轴机构.pdf
一种四头自动换刀主轴机构及多头自动换刀主轴机构,它包括:为多个刀轴装置提供安装结构的壳体;转向DD直驱电机,其设于壳体内且驱动所述壳体转向;刀轴驱动电机;其驱动主动伞齿轮,主动伞齿轮啮合各从动伞齿轮;所述刀轴装置借助于离合器使驱动刀头部在转动工作状态和在空载状态下转换。它具有结构简单、牢固、便于安装、传动稳定、自动转向换刀、应用自动化设备可一次加工完成工件,过程无须人工换刀;大大提高生产效率,有效降低劳动强度和成本。因此,它是一种经济性和技术性均具优越性能的产品。

基于PMAC的多工位弹簧机自动换刀机构控制系统开发.pptx
汇报人:目录PARTONEPARTTWOPMAC多轴控制器的特点PMAC在弹簧机中的应用优势自动换刀机构控制系统的需求分析PARTTHREE硬件架构设计伺服电机选型与配置传感器与执行器的选择与连接电气控制系统设计PARTFOUR软件架构设计PMAC控制器编程自动换刀逻辑算法实现人机交互界面设计PARTFIVE系统调试流程调试过程中的问题与解决方案系统性能优化调试结果评估PARTSIX应用案例介绍实施效果分析与传统方法的比较优势潜在应用领域拓展PARTSEVEN研究结论总结技术创新点总结未来研究方向与展望T

一种机床主轴换刀机构和机床.pdf
本发明公开了一种机床主轴换刀机构和机床,包括:活塞缸组件,包括缸体、活塞和顶盖,顶盖或缸体设有第一气路,活塞设有第二气路;轴芯,设有轴芯内孔,轴芯设有第三气路,第三气路延伸至轴芯和刀柄的连接面;拉爪组件,包括拉杆帽、拉杆、弹性复位部件和拉爪座,拉爪组件设有偏离拉爪组件轴线的第四气路;其中,拉刀状态下,第一气路与第二气路错开而不接通,第二气路与第四气路断开,第四气路与第三气路错开而不接通;打刀状态下,第一气路、第二气路、第四气路与第三气路形成依次连接的通路。本发明不占用电主轴特别是拉爪组件的轴线空间,一是节
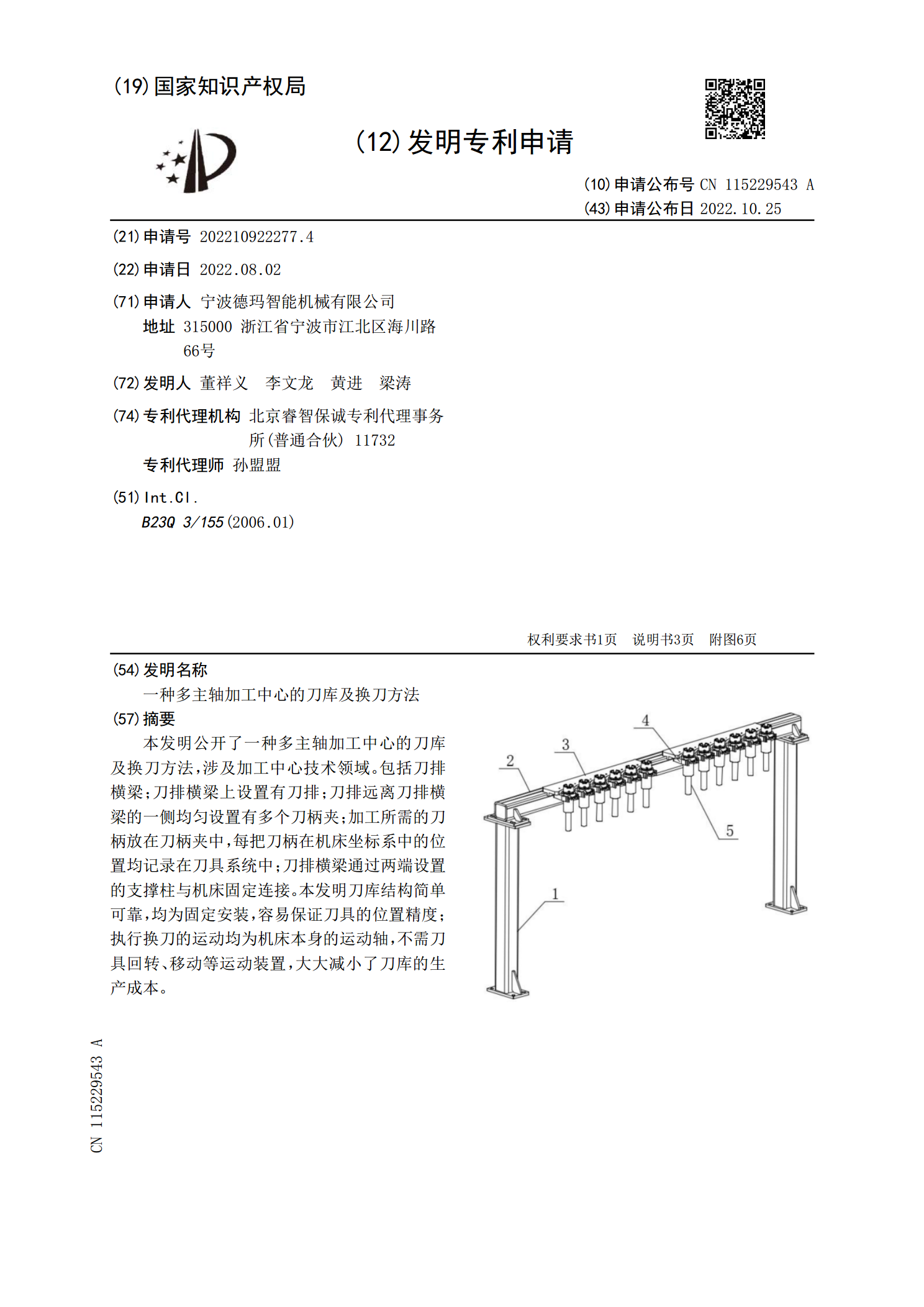
一种多主轴加工中心的刀库及换刀方法.pdf
本发明公开了一种多主轴加工中心的刀库及换刀方法,涉及加工中心技术领域。包括刀排横梁;刀排横梁上设置有刀排;刀排远离刀排横梁的一侧均匀设置有多个刀柄夹;加工所需的刀柄放在刀柄夹中,每把刀柄在机床坐标系中的位置均记录在刀具系统中;刀排横梁通过两端设置的支撑柱与机床固定连接。本发明刀库结构简单可靠,均为固定安装,容易保证刀具的位置精度;执行换刀的运动均为机床本身的运动轴,不需刀具回转、移动等运动装置,大大减小了刀库的生产成本。