
凸轮驱动多功能机械手.pdf

雨星****萌娃

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
凸轮驱动多功能机械手.pdf
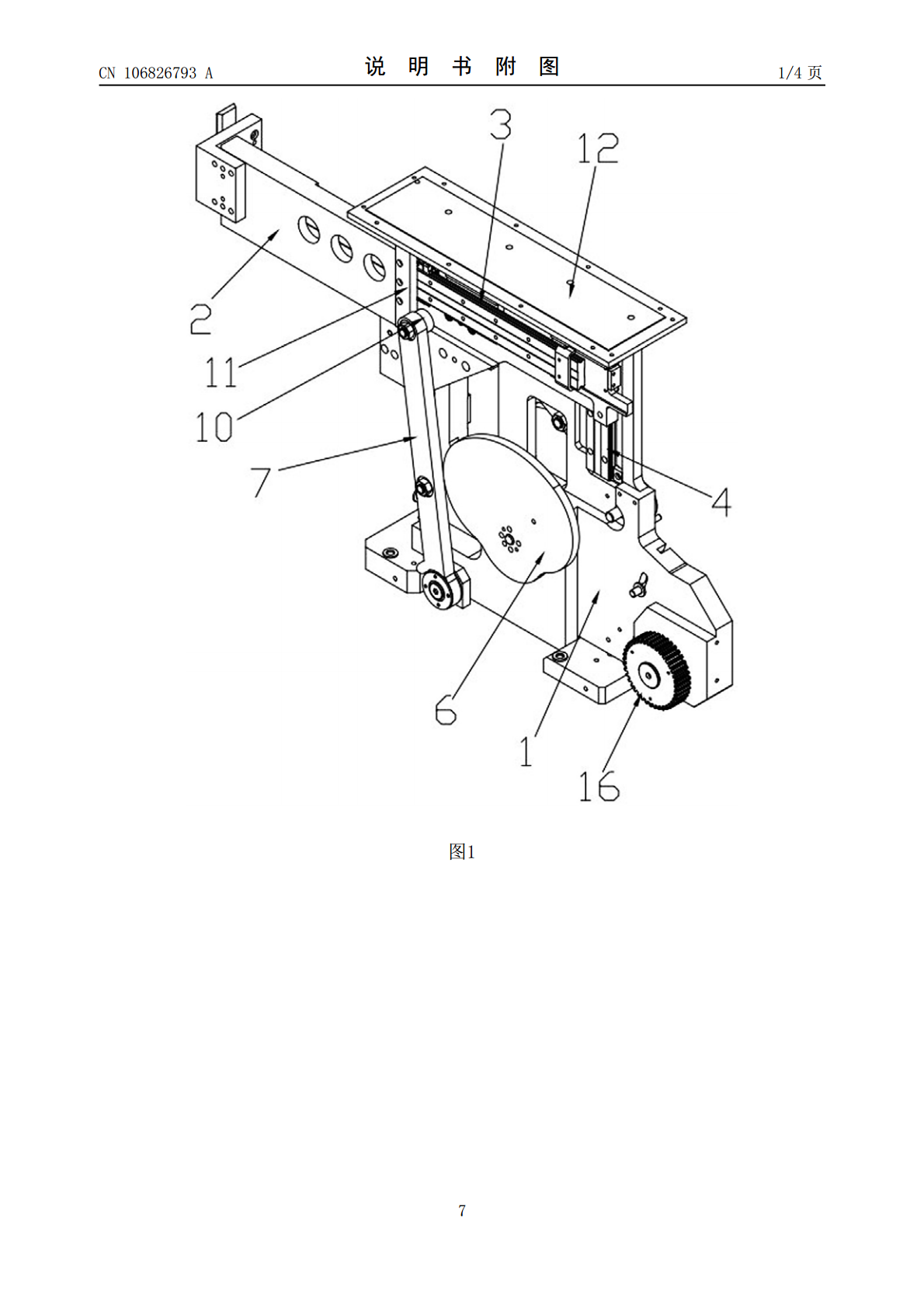
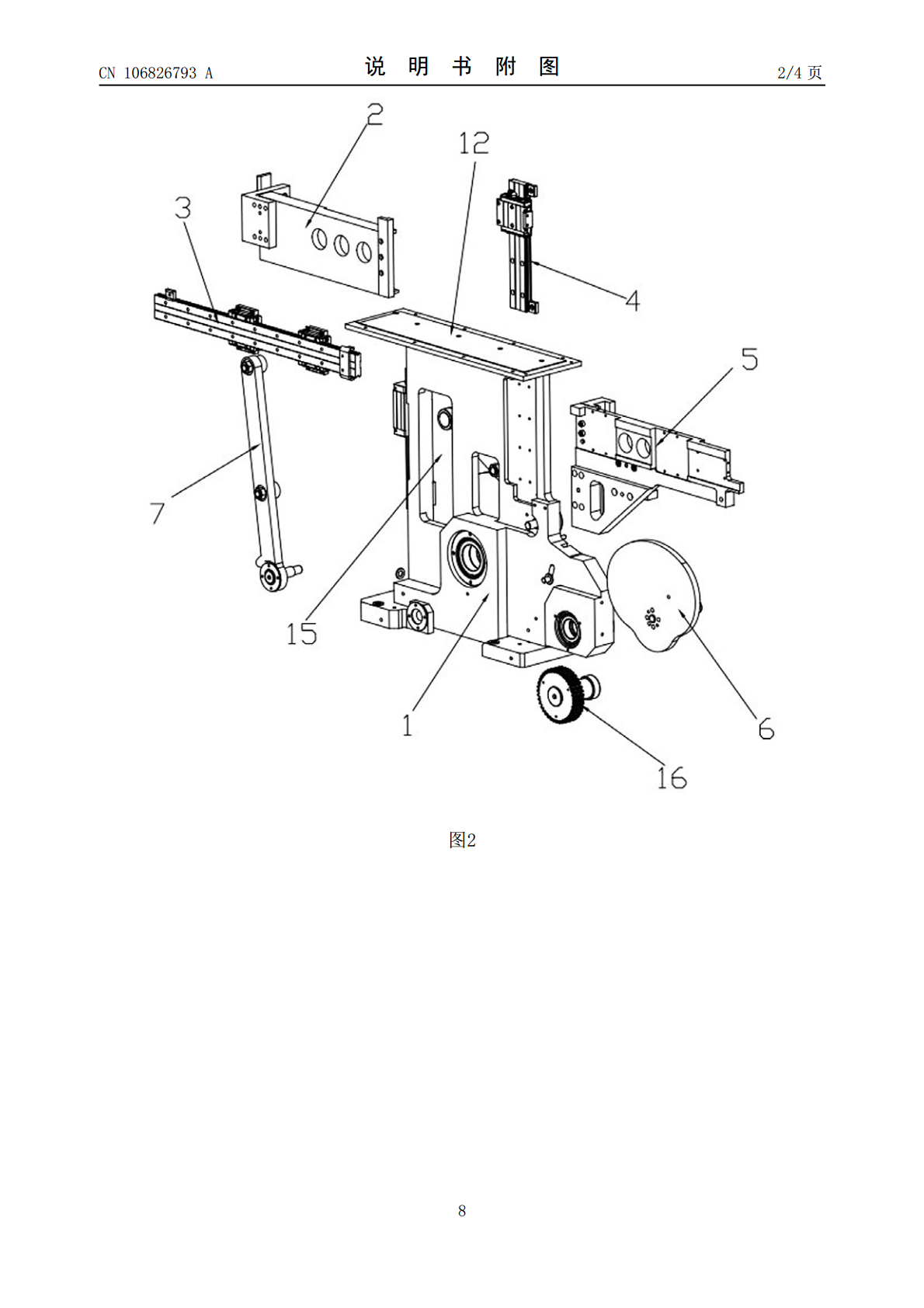
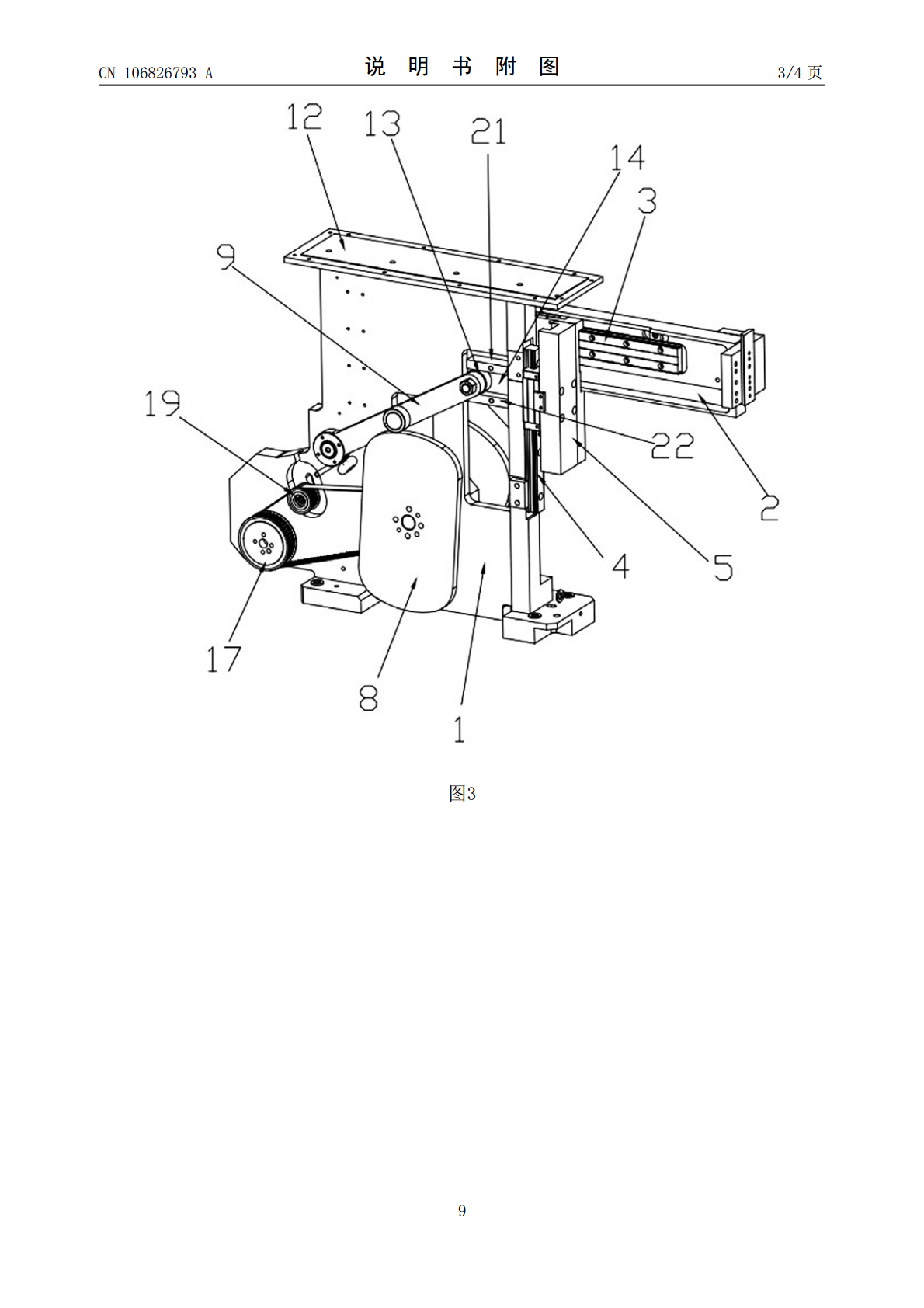
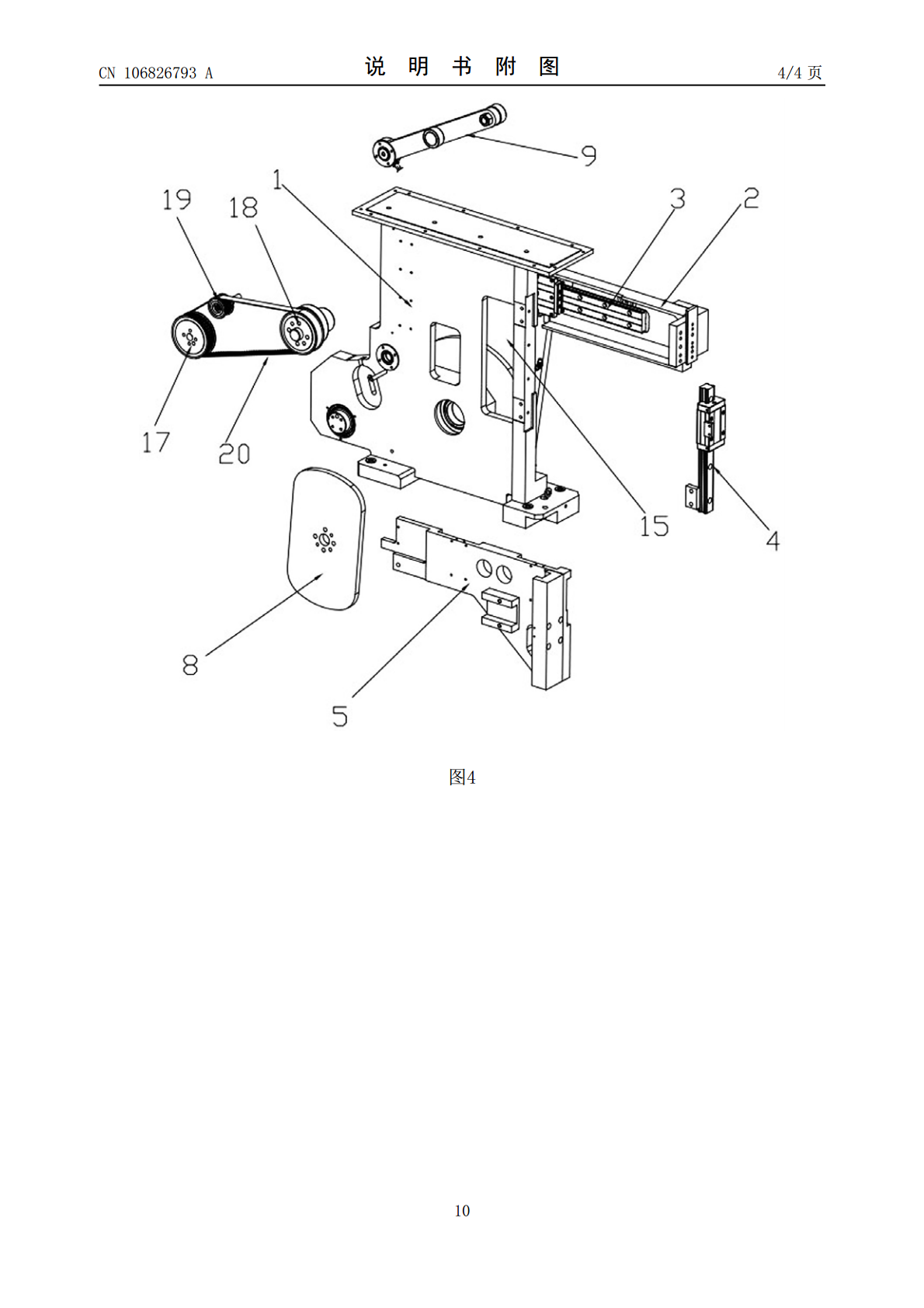
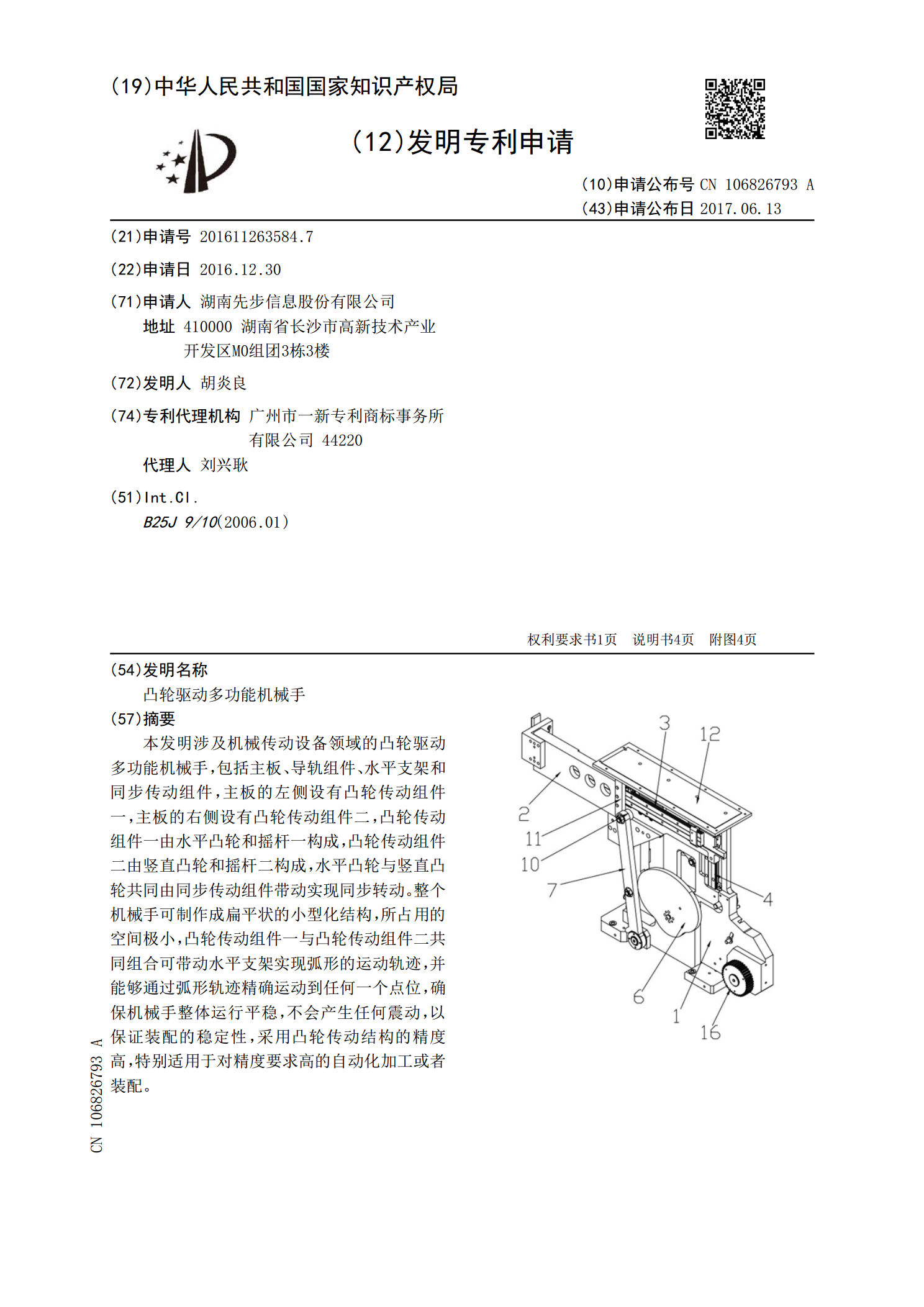
本发明涉及机械传动设备领域的凸轮驱动多功能机械手,包括主板、导轨组件、水平支架和同步传动组件,主板的左侧设有凸轮传动组件一,主板的右侧设有凸轮传动组件二,凸轮传动组件一由水平凸轮和摇杆一构成,凸轮传动组件二由竖直凸轮和摇杆二构成,水平凸轮与竖直凸轮共同由同步传动组件带动实现同步转动。整个机械手可制作成扁平状的小型化结构,所占用的空间极小,凸轮传动组件一与凸轮传动组件二共同组合可带动水平支架实现弧形的运动轨迹,并能够通过弧形轨迹精确运动到任何一个点位,确保机械手整体运行平稳,不会产生任何震动,以保证装配的稳
凸轮驱动机械手.pdf
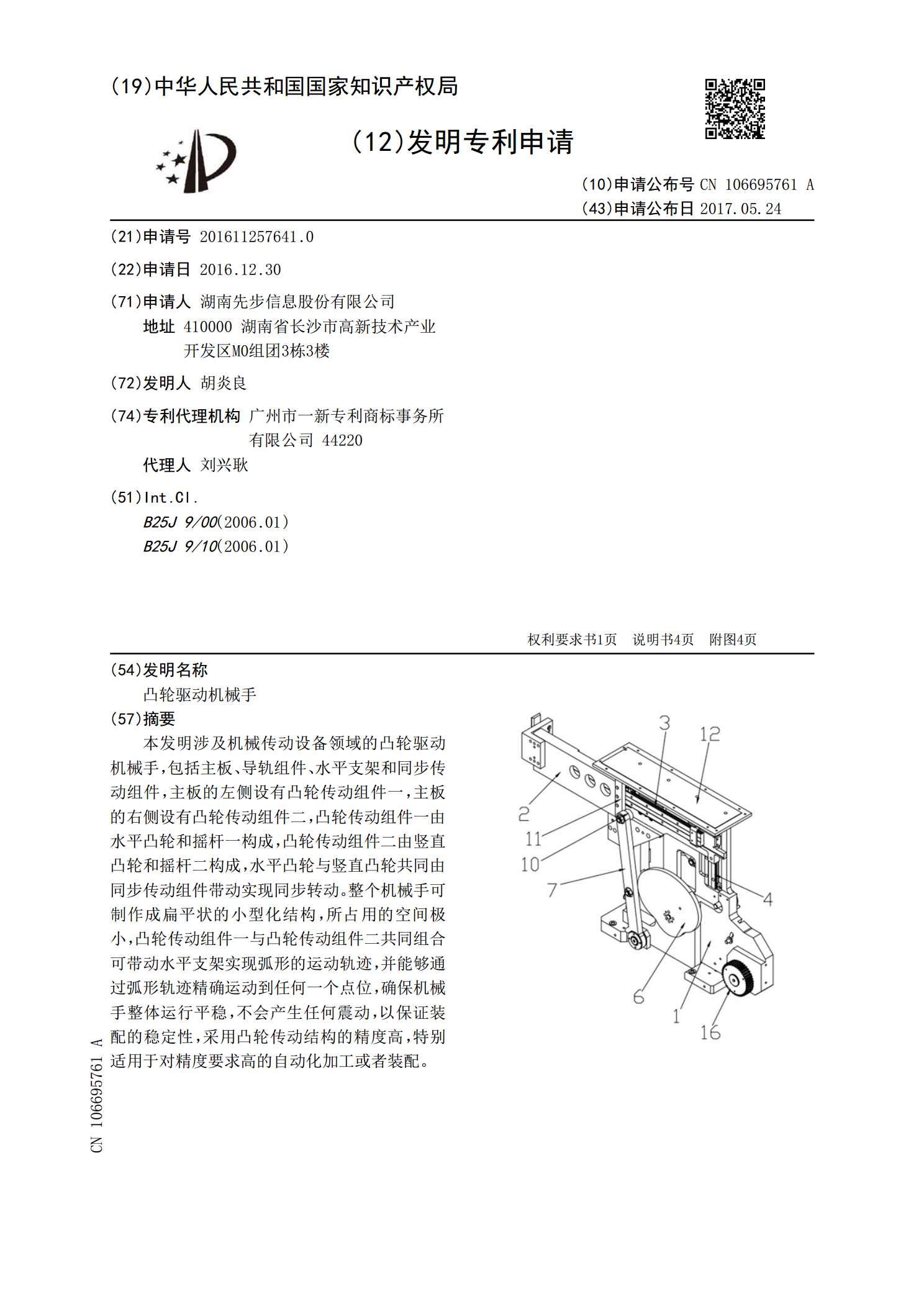
本发明涉及机械传动设备领域的凸轮驱动机械手,包括主板、导轨组件、水平支架和同步传动组件,主板的左侧设有凸轮传动组件一,主板的右侧设有凸轮传动组件二,凸轮传动组件一由水平凸轮和摇杆一构成,凸轮传动组件二由竖直凸轮和摇杆二构成,水平凸轮与竖直凸轮共同由同步传动组件带动实现同步转动。整个机械手可制作成扁平状的小型化结构,所占用的空间极小,凸轮传动组件一与凸轮传动组件二共同组合可带动水平支架实现弧形的运动轨迹,并能够通过弧形轨迹精确运动到任何一个点位,确保机械手整体运行平稳,不会产生任何震动,以保证装配的稳定性,

凸轮驱动式双向往复机械手臂.pdf
本发明公开了一种凸轮驱动式双向往复机械手臂,包括底板和动力箱,还包括固定安装在所述动力箱动力输出轴端部的凸轮以及固定安装在推杆两端的机械手一和机械手二;所述推杆通过平行设置的所述L形支板一和所述L形支板二滑动安装在所述底板上侧,所述推杆上位于所述L形支板一和所述L形支板二之间固定安装有滚轮架,所述滚轮架上通过销轴转动安装有与所述凸轮配合使用的滚轮,所述滚轮架与所述L形支板二之间设置有用于驱动所述推杆复位的复位弹簧。本发明具有以下特点:设计合理,结构简单,操作方便,自动化程度高,使用寿命长,适用范围广,生产
一种双凸轮驱动机械手.pdf
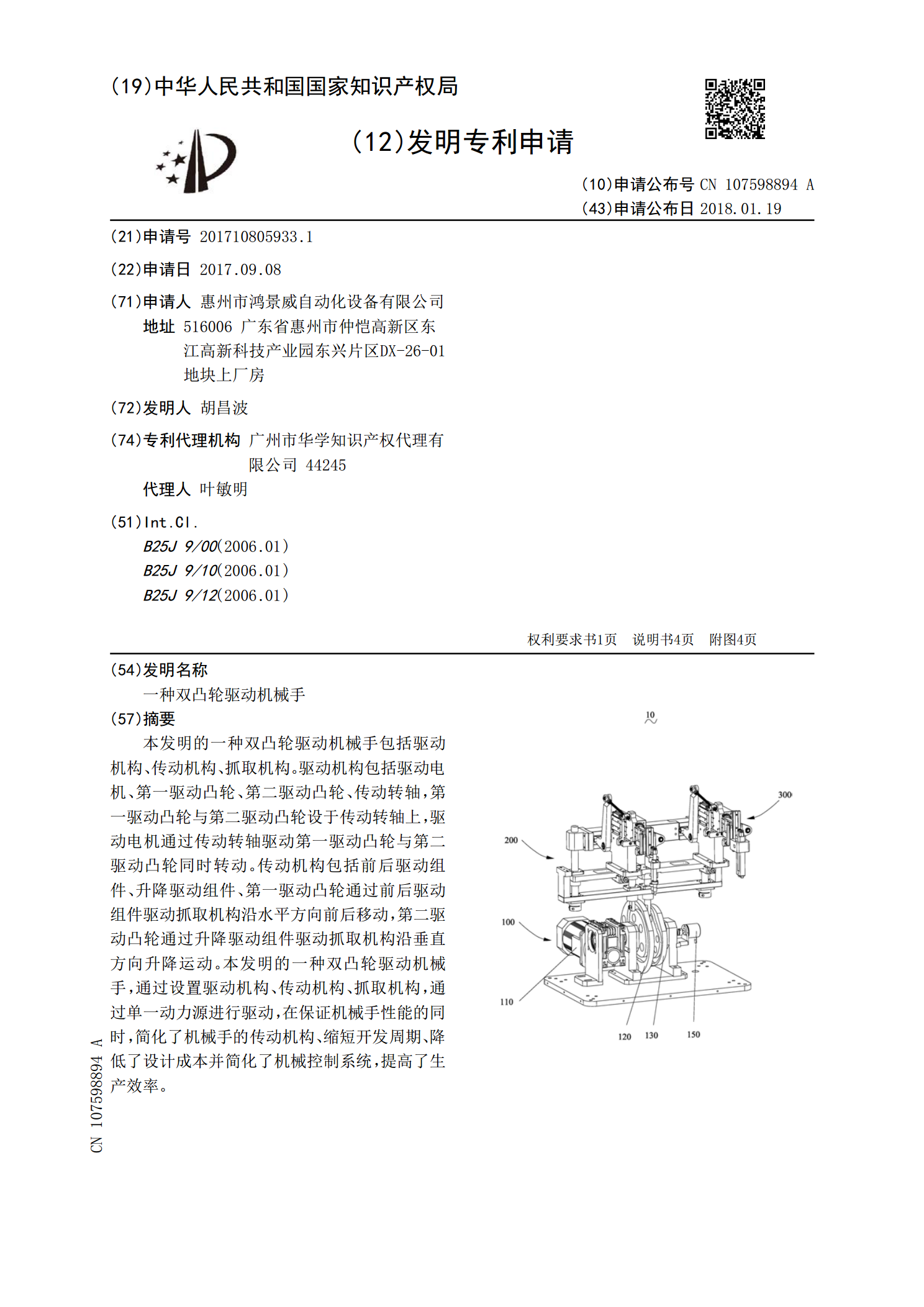
本发明的一种双凸轮驱动机械手包括驱动机构、传动机构、抓取机构。驱动机构包括驱动电机、第一驱动凸轮、第二驱动凸轮、传动转轴,第一驱动凸轮与第二驱动凸轮设于传动转轴上,驱动电机通过传动转轴驱动第一驱动凸轮与第二驱动凸轮同时转动。传动机构包括前后驱动组件、升降驱动组件、第一驱动凸轮通过前后驱动组件驱动抓取机构沿水平方向前后移动,第二驱动凸轮通过升降驱动组件驱动抓取机构沿垂直方向升降运动。本发明的一种双凸轮驱动机械手,通过设置驱动机构、传动机构、抓取机构,通过单一动力源进行驱动,在保证机械手性能的同时,简化了机械

一种凸轮驱动的摆动机械手.pdf
本发明涉及一种凸轮驱动的摆动机械手,包括主轴,装配于主轴上开夹凸轮和摆动凸轮,双连杆机构及夹子部分;电机通过链传动带动主轴转动,开夹凸轮通过双连杆机构控制夹子的开闭动作,同时摆动凸轮通过双连杆机构控制夹子部分的摆动。其采用纯机械结构,无需要电控或是气动,仅仅通过凸轮驱动实现了物料或是产品定点往复传递功能。本摆动机械手在整套设备中的成功运用,给设备带来了结构紧凑、维护方便、效率高、抗干扰能力强的优点,可广泛应用于自动化生产设备。