
管道疏通机器人.pdf

山柳****魔王

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管道疏通机器人.pdf
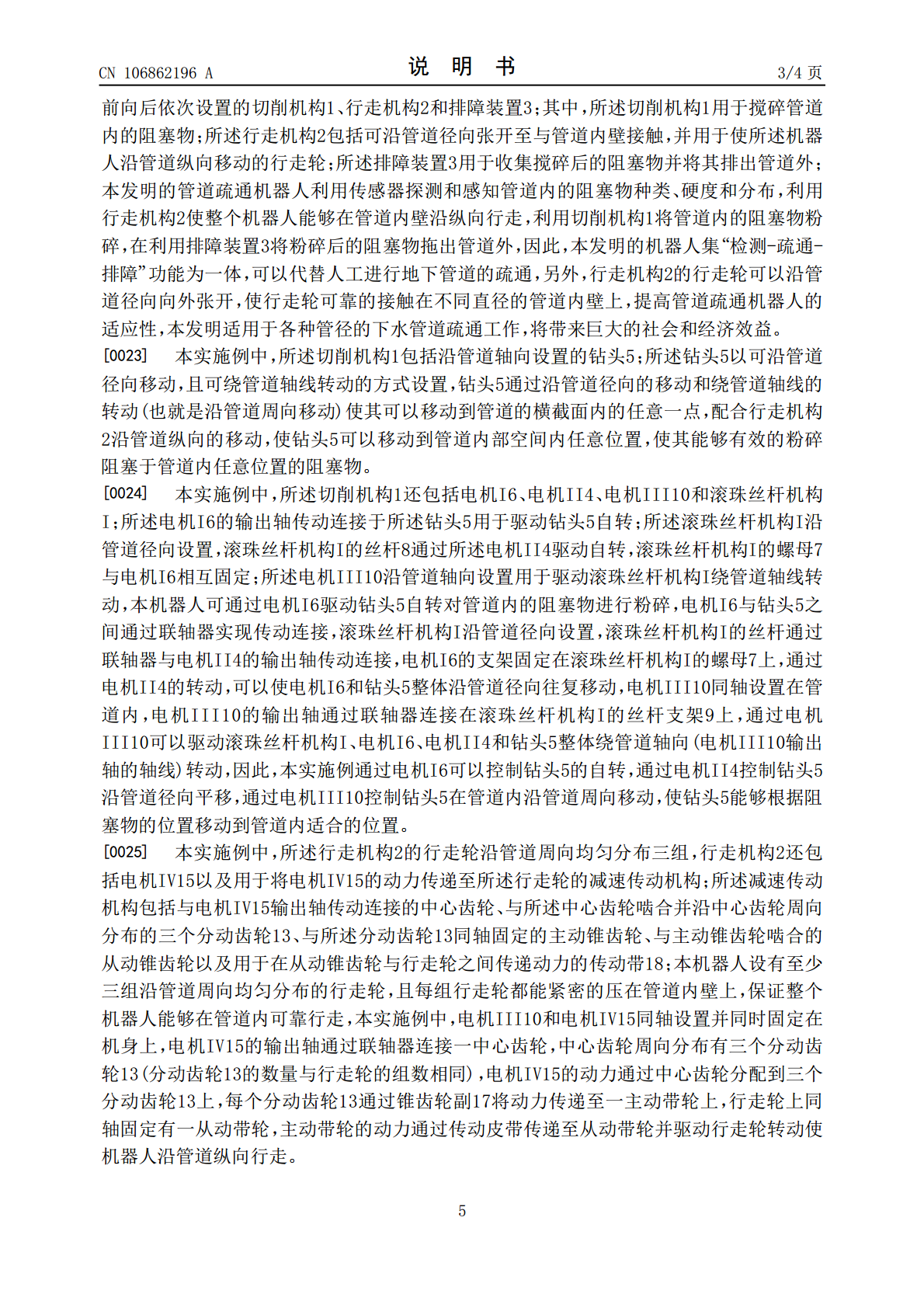
本发明公开了一种管道疏通机器人,包括由前向后依次设置的切削机构、行走机构和排障装置;其中,所述切削机构用于搅碎管道内的阻塞物;所述行走机构包括可沿管道径向张开至与管道内壁接触,并用于使所述机器人沿管道纵向移动的行走轮;所述排障装置用于收集搅碎后的阻塞物并将其排出管道外,本机器人集“检测‑疏通‑排障”功能为一体,可实现对下水管道的疏通与清理,无需人工入井工作,自动化程度高,提高了安全性,同时可适应不同管径管道的疏通作业。

一种管道疏通机器人.pdf
本发明的一种管道疏通机器人,包括主体、第一环形安装架和第二环形安装架、刀片和刀片齿轮马达、钻头和钻头齿轮马达、六个高压水缸和六个驱动齿轮马达、十二个行走轮。本发明全部由高水压驱动,不需要电力驱动,从而能够适应管道内部复杂的工作环境;通过设置有高压水缸,在高水压缸的作用下,行走轮可产生较大的压力,贴紧在管道壁面上,从而使本发明可以适应一定范围内管径的管道。
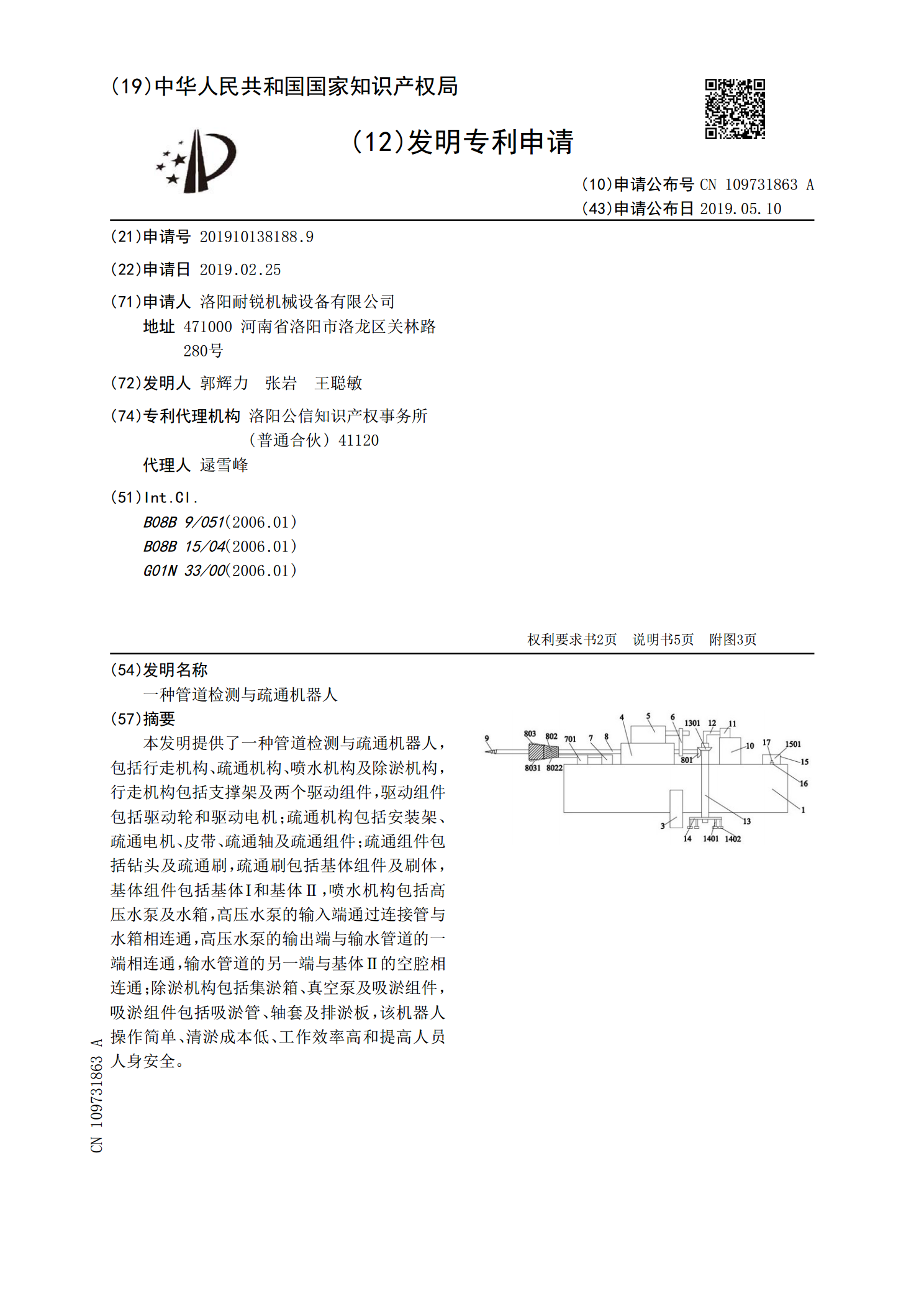
一种管道检测与疏通机器人.pdf
本发明提供了一种管道检测与疏通机器人,包括行走机构、疏通机构、喷水机构及除淤机构,行走机构包括支撑架及两个驱动组件,驱动组件包括驱动轮和驱动电机;疏通机构包括安装架、疏通电机、皮带、疏通轴及疏通组件;疏通组件包括钻头及疏通刷,疏通刷包括基体组件及刷体,基体组件包括基体Ⅰ和基体Ⅱ,喷水机构包括高压水泵及水箱,高压水泵的输入端通过连接管与水箱相连通,高压水泵的输出端与输水管道的一端相连通,输水管道的另一端与基体Ⅱ的空腔相连通;除淤机构包括集淤箱、真空泵及吸淤组件,吸淤组件包括吸淤管、轴套及排淤板,该机器人操作
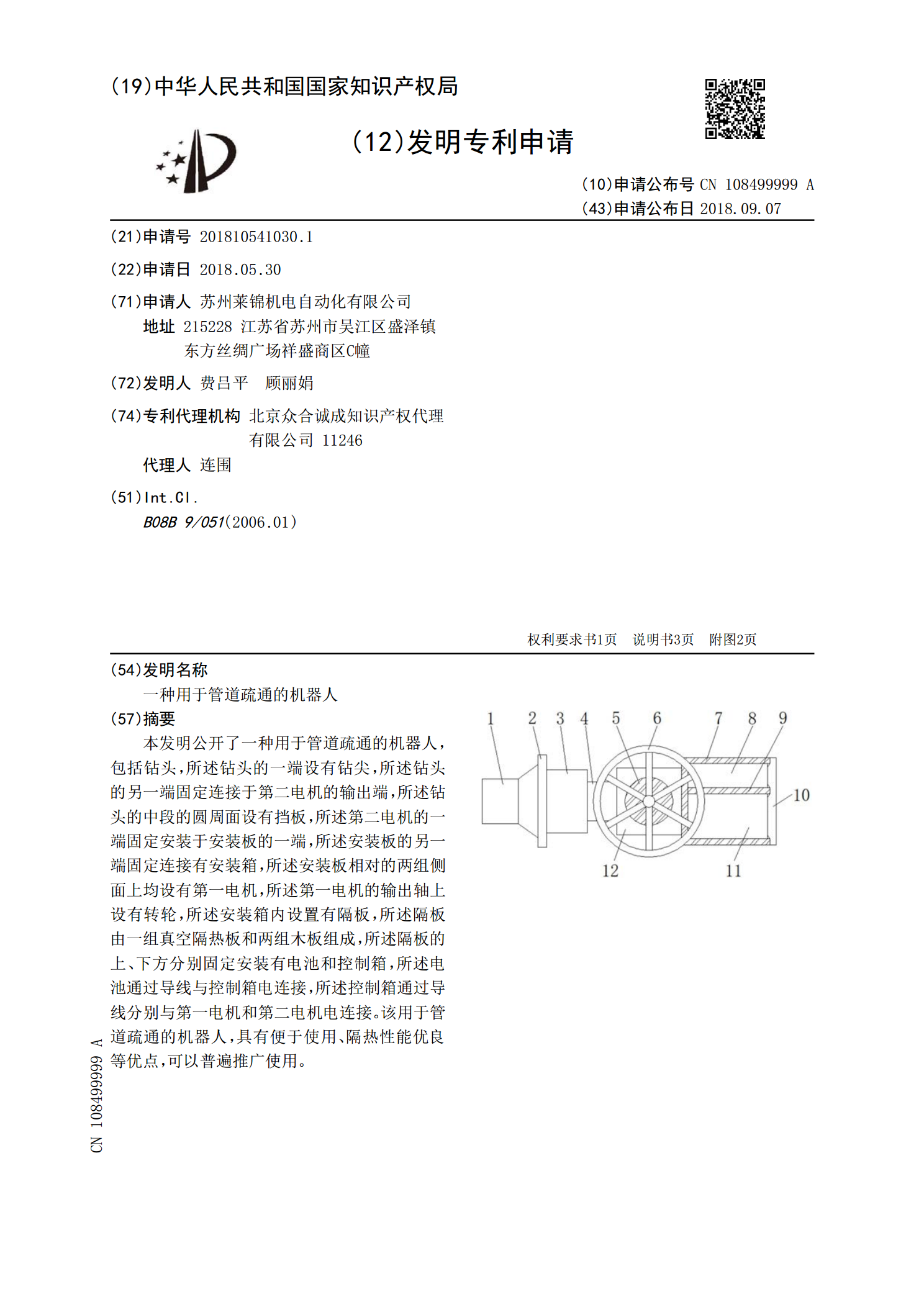
一种用于管道疏通的机器人.pdf
本发明公开了一种用于管道疏通的机器人,包括钻头,所述钻头的一端设有钻尖,所述钻头的另一端固定连接于第二电机的输出端,所述钻头的中段的圆周面设有挡板,所述第二电机的一端固定安装于安装板的一端,所述安装板的另一端固定连接有安装箱,所述安装板相对的两组侧面上均设有第一电机,所述第一电机的输出轴上设有转轮,所述安装箱内设置有隔板,所述隔板由一组真空隔热板和两组木板组成,所述隔板的上、下方分别固定安装有电池和控制箱,所述电池通过导线与控制箱电连接,所述控制箱通过导线分别与第一电机和第二电机电连接。该用于管道疏通的机

管道疏通_.doc
一、高压水射流的发展趋势高压水射流清洗技术是近年来在国际兴起的一门高科技清洗术。高压水射流清洗具有清洗成本低、速度快、清净率高、不损坏被清洗物、应用范围广、不污染环境等特点。自80年代中期传入我国以来,逐渐得到了工业界的普遍认同与重视。在传统的清洗作业中采用的清洗技术有机械钻孔清洗、蒸汽清洗、化学清洗、超声波清洗、以及水射流清洗等几十种形式。日本、欧美等西方发达国家在70年代以前主要采用化学方法清洗,自70年代末开始发展高压水射流清洗技术。到目前为止,高压水射流清洗已经成为西方发达国家的主流清洗技术,占到