
一种园林树木移栽机器人.pdf

一吃****仕龙

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种园林树木移栽机器人.pdf
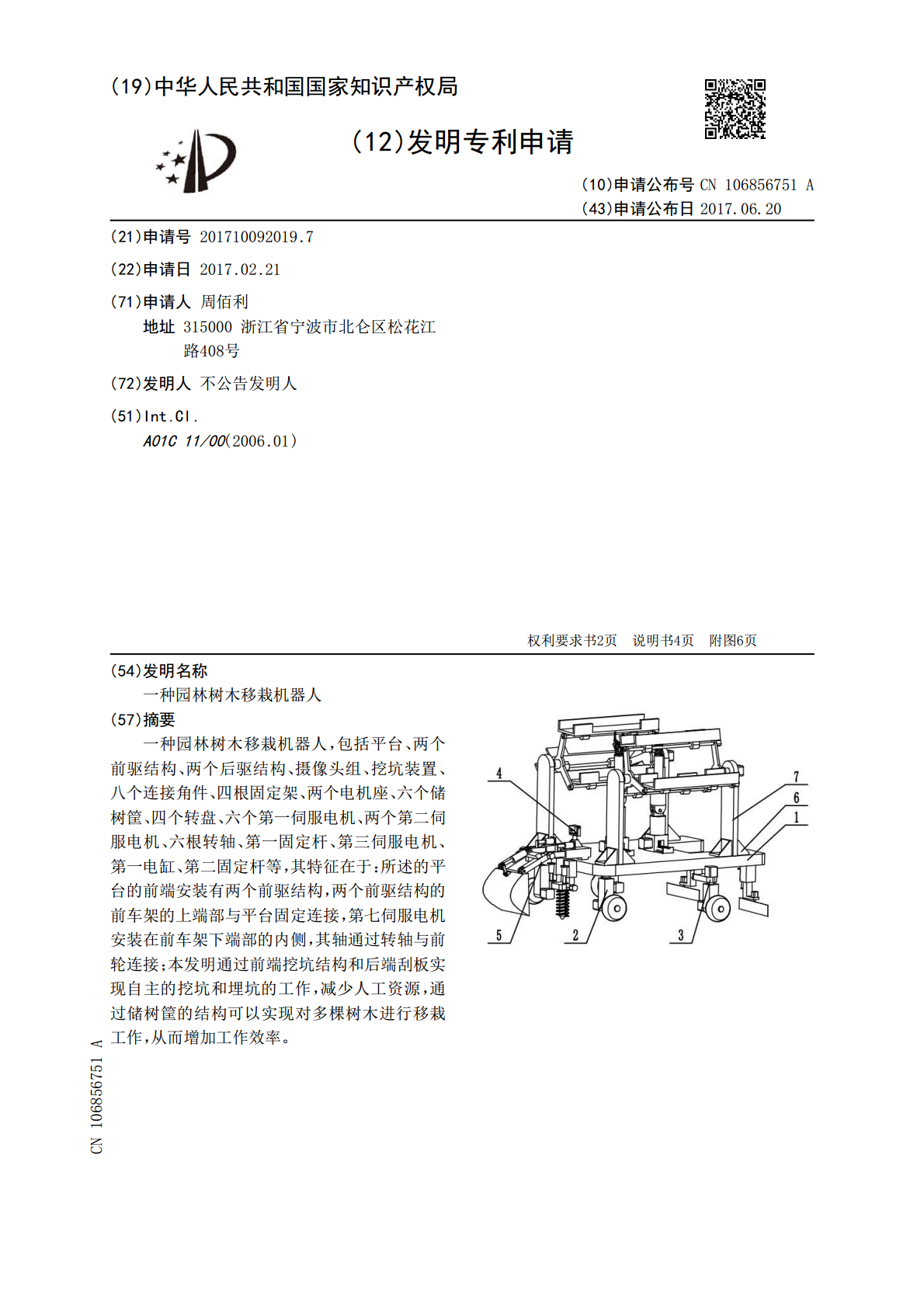
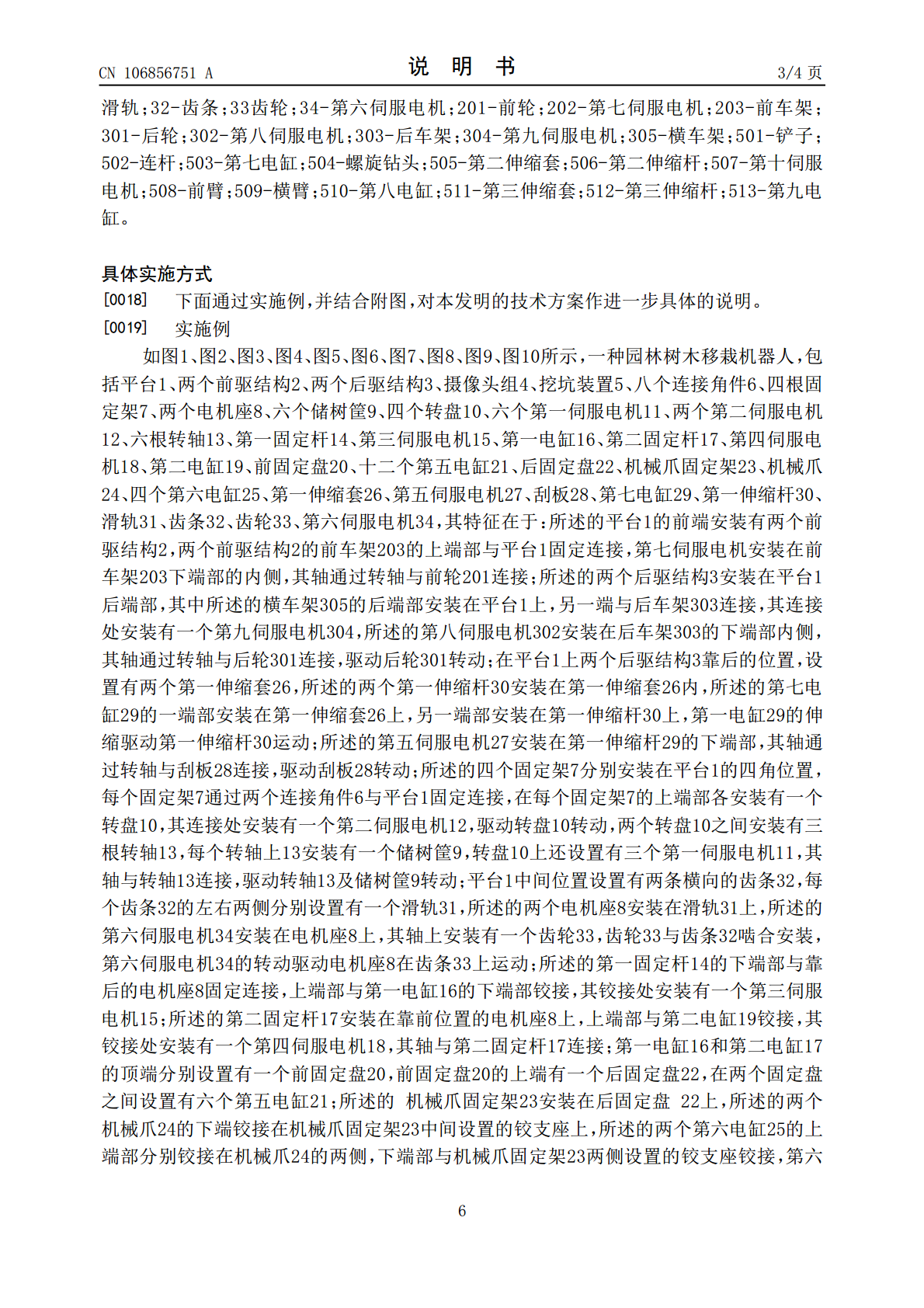
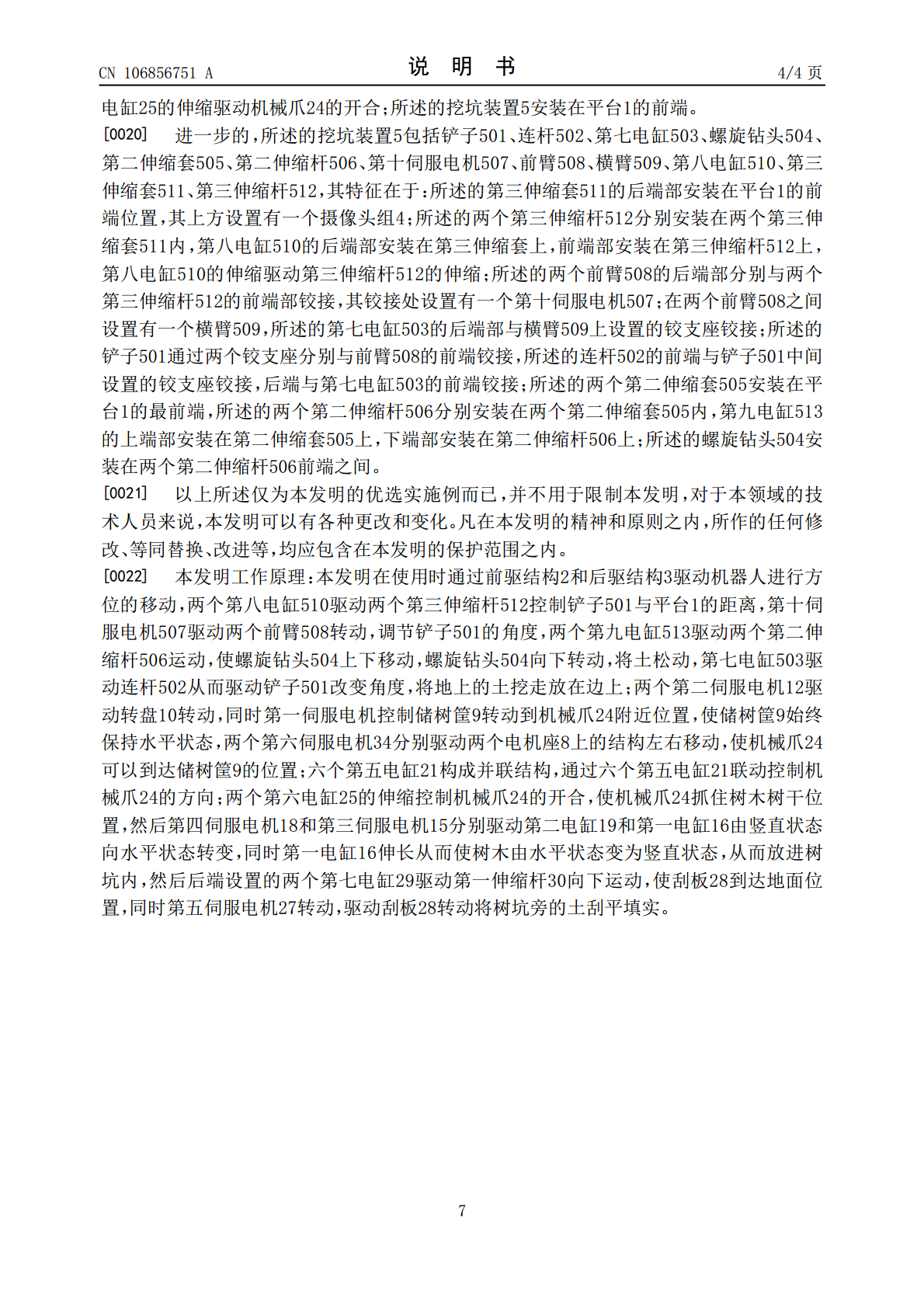
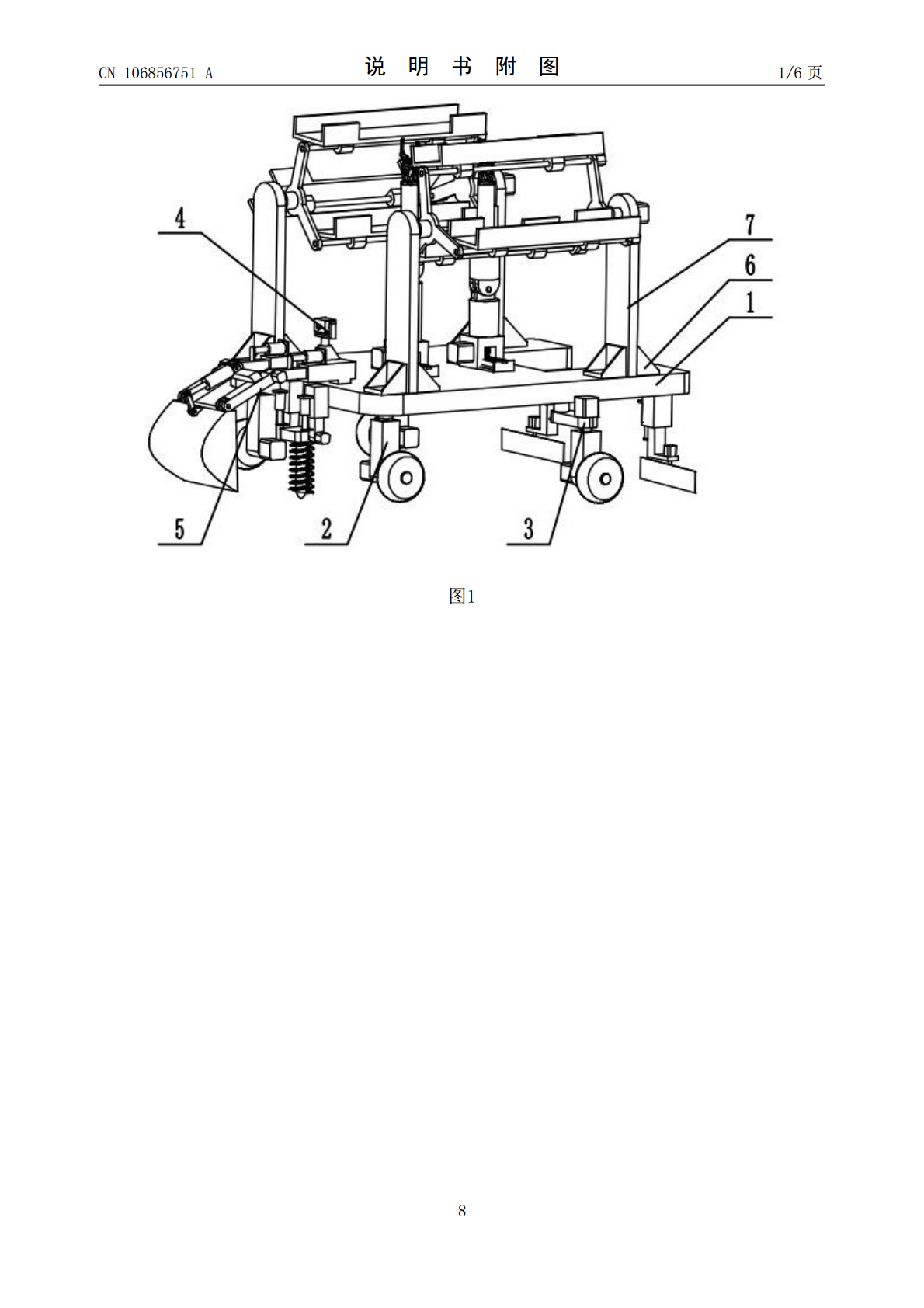
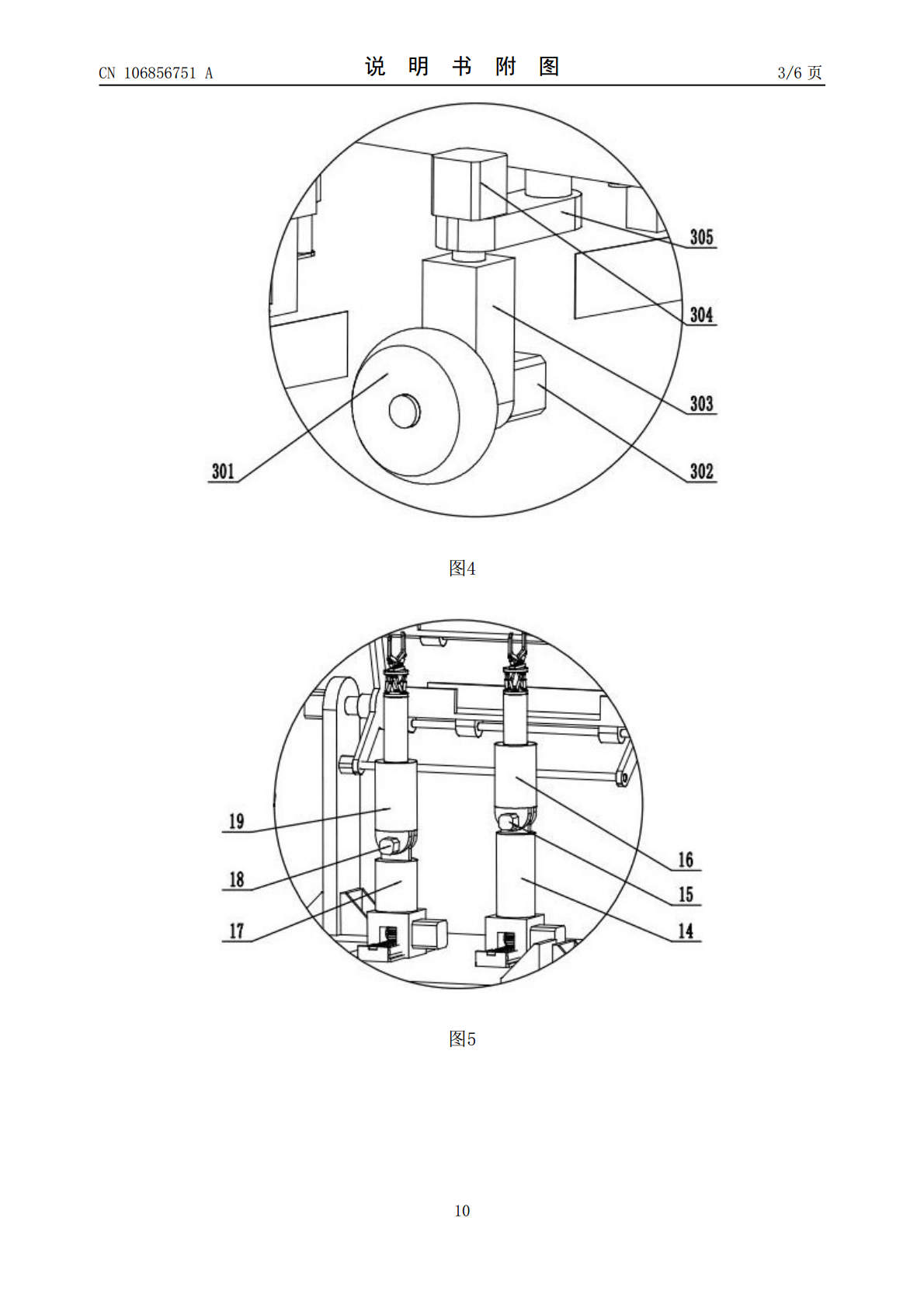
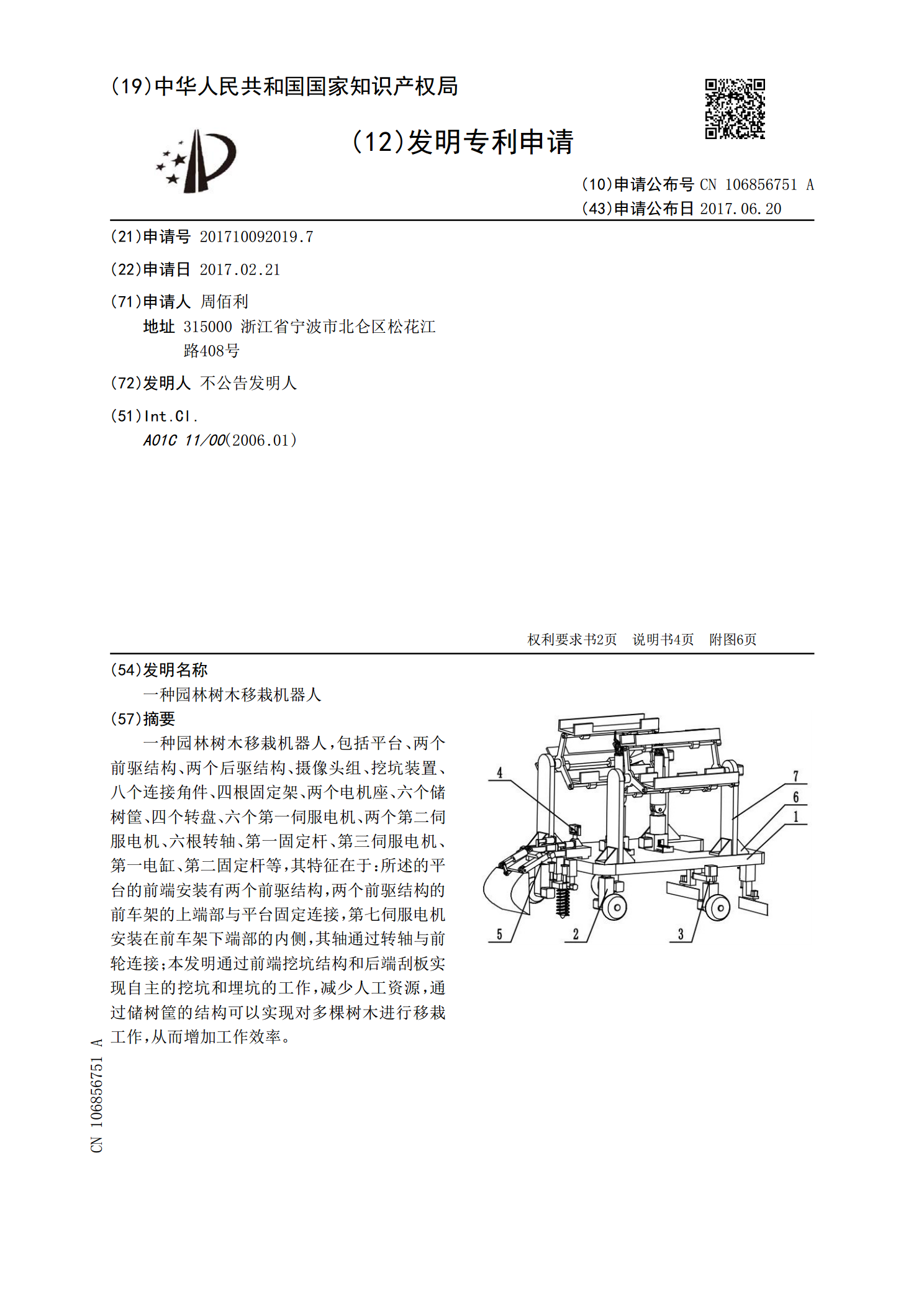
一种园林树木移栽机器人,包括平台、两个前驱结构、两个后驱结构、摄像头组、挖坑装置、八个连接角件、四根固定架、两个电机座、六个储树筐、四个转盘、六个第一伺服电机、两个第二伺服电机、六根转轴、第一固定杆、第三伺服电机、第一电缸、第二固定杆等,其特征在于:所述的平台的前端安装有两个前驱结构,两个前驱结构的前车架的上端部与平台固定连接,第七伺服电机安装在前车架下端部的内侧,其轴通过转轴与前轮连接;本发明通过前端挖坑结构和后端刮板实现自主的挖坑和埋坑的工作,减少人工资源,通过储树筐的结构可以实现对多棵树木进行移栽工
一种园林树木移栽设备.pdf
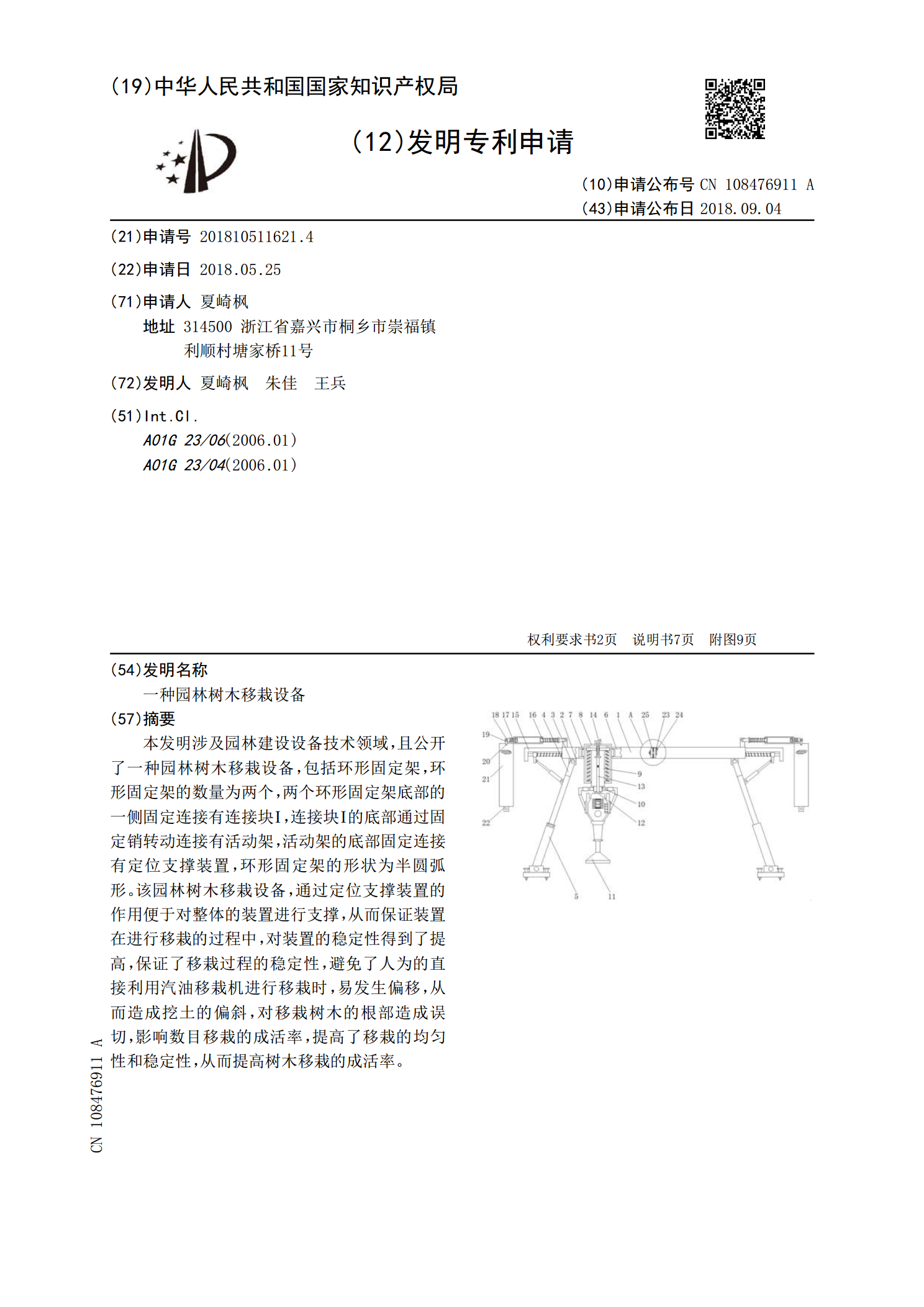
本发明涉及园林建设设备技术领域,且公开了一种园林树木移栽设备,包括环形固定架,环形固定架的数量为两个,两个环形固定架底部的一侧固定连接有连接块Ⅰ,连接块Ⅰ的底部通过固定销转动连接有活动架,活动架的底部固定连接有定位支撑装置,环形固定架的形状为半圆弧形。该园林树木移栽设备,通过定位支撑装置的作用便于对整体的装置进行支撑,从而保证装置在进行移栽的过程中,对装置的稳定性得到了提高,保证了移栽过程的稳定性,避免了人为的直接利用汽油移栽机进行移栽时,易发生偏移,从而造成挖土的偏斜,对移栽树木的根部造成误切,影响数目
一种园林树木移栽设备.pdf
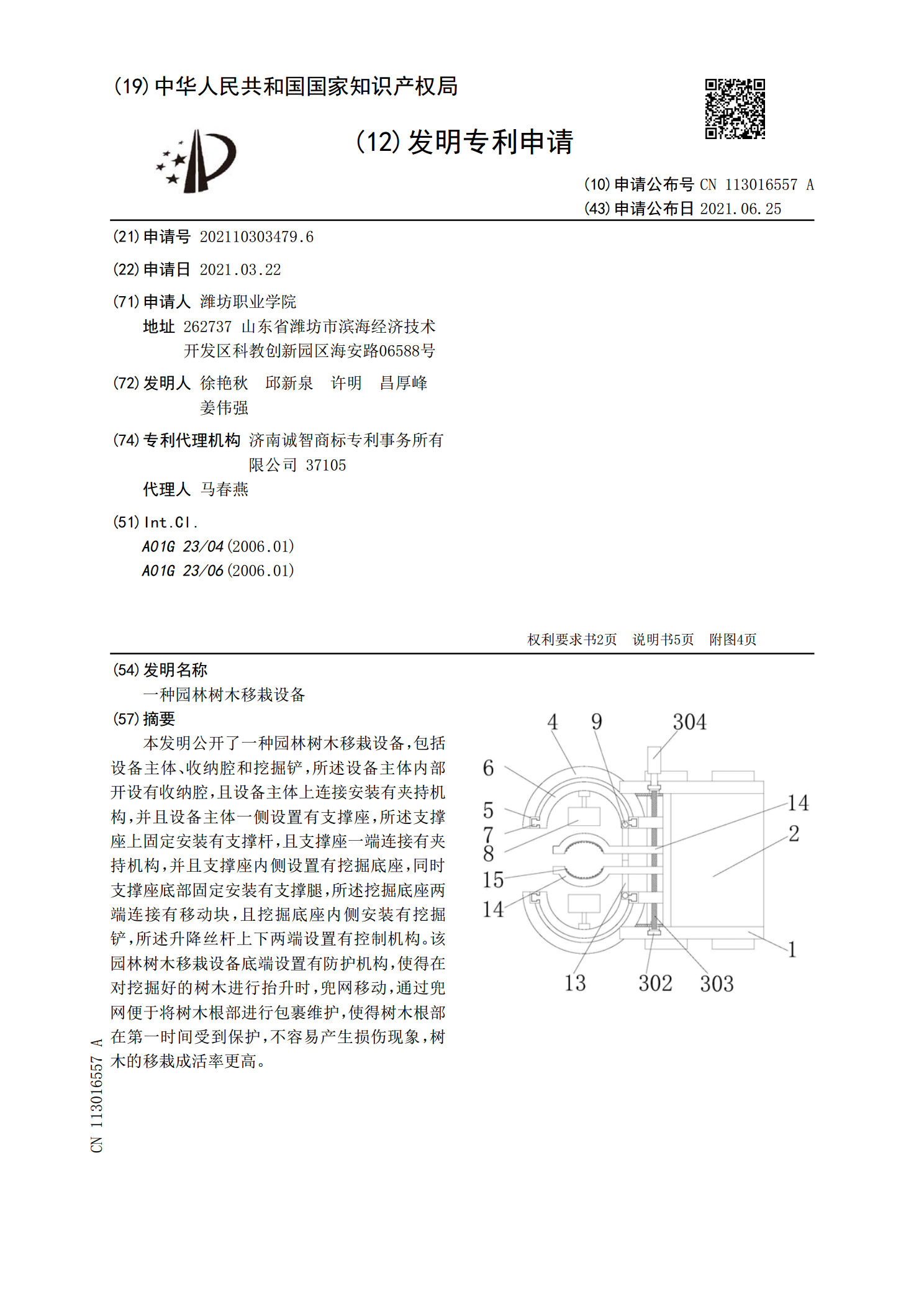
本发明公开了一种园林树木移栽设备,包括设备主体、收纳腔和挖掘铲,所述设备主体内部开设有收纳腔,且设备主体上连接安装有夹持机构,并且设备主体一侧设置有支撑座,所述支撑座上固定安装有支撑杆,且支撑座一端连接有夹持机构,并且支撑座内侧设置有挖掘底座,同时支撑座底部固定安装有支撑腿,所述挖掘底座两端连接有移动块,且挖掘底座内侧安装有挖掘铲,所述升降丝杆上下两端设置有控制机构。该园林树木移栽设备底端设置有防护机构,使得在对挖掘好的树木进行抬升时,兜网移动,通过兜网便于将树木根部进行包裹维护,使得树木根部在第一时间受

一种园林树木的移栽方法.pdf
本发明公开了一种园林树木的移栽方法,主要包括以下步骤:步骤1:园林土壤改良;步骤2:覆盖基质;步骤3:挖种植穴;步骤4:树木挖掘,对目标树进行断根和截冠处理,以树干胸径的6~8倍为土球直径,以树兜为中心,在四周由外向内挖掘,移栽时必须保证树根带有足够大的土球,并尽量多保留根系和根际原土;步骤5:树木运输;步骤6:移栽树木,将树木放置到种植穴内,填入土壤,进行后期养护。本发明提供一种园林树木的移栽方法,通过对园林土壤进行改良,改善土壤性质,提高土壤肥力,通过覆盖基质,确保基质长时间保持均匀水分,促进树体生根
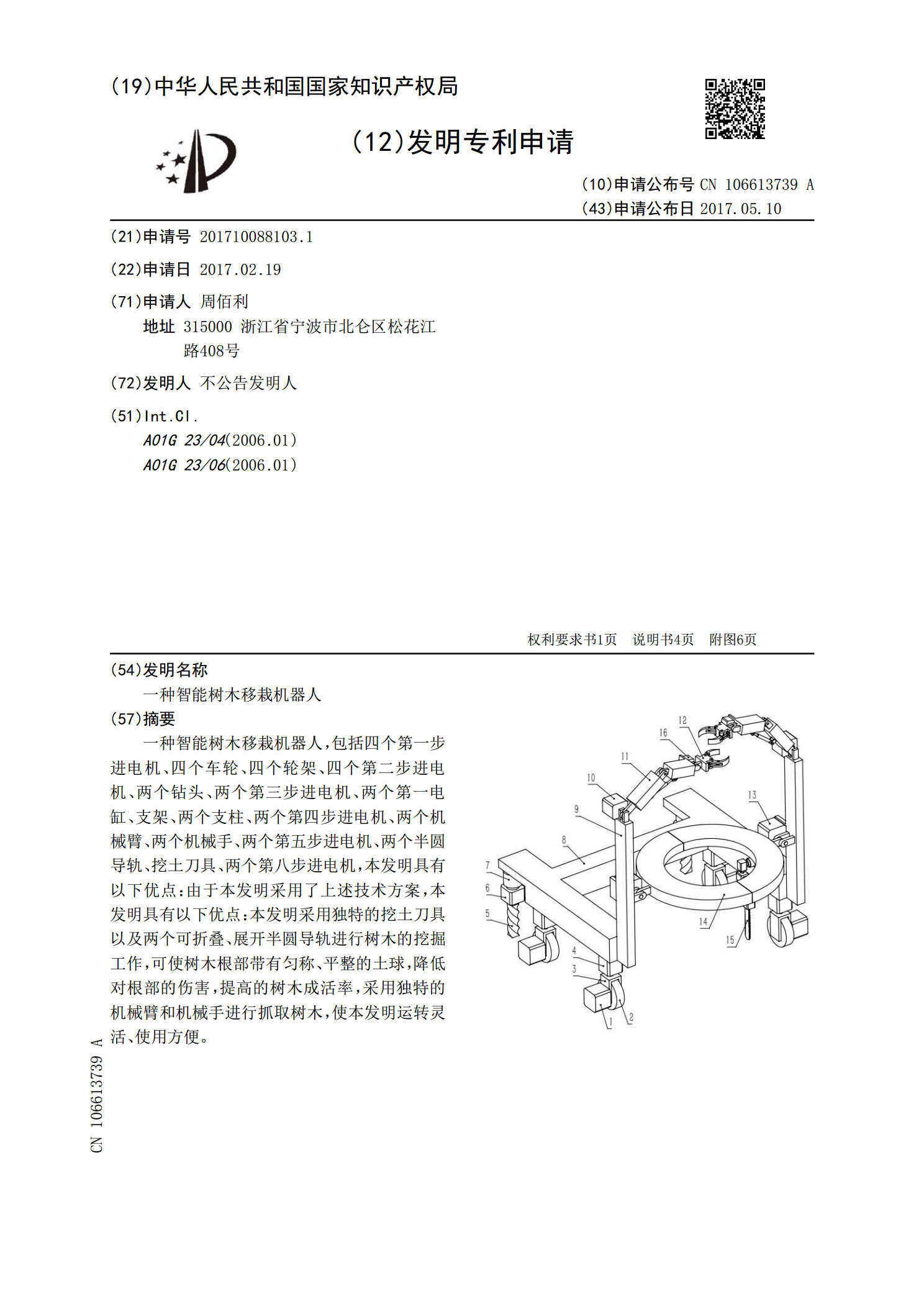
一种智能树木移栽机器人.pdf
一种智能树木移栽机器人,包括四个第一步进电机、四个车轮、四个轮架、四个第二步进电机、两个钻头、两个第三步进电机、两个第一电缸、支架、两个支柱、两个第四步进电机、两个机械臂、两个机械手、两个第五步进电机、两个半圆导轨、挖土刀具、两个第八步进电机,本发明具有以下优点:由于本发明采用了上述技术方案,本发明具有以下优点:本发明采用独特的挖土刀具以及两个可折叠、展开半圆导轨进行树木的挖掘工作,可使树木根部带有匀称、平整的土球,降低对根部的伤害,提高的树木成活率,采用独特的机械臂和机械手进行抓取树木,使本发明运转灵活